






树莓派部署Yolov5-Lite 1.5
一.烧录镜像
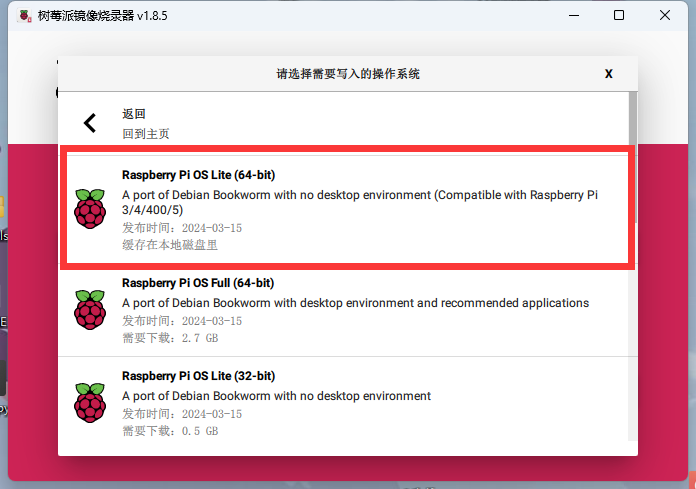
使用树莓派镜像下载软件(rpi-imager)制卡。
这边我使用的是无桌面环境的arrch 64位系统
然后可以配置WIFI,以及用户名。
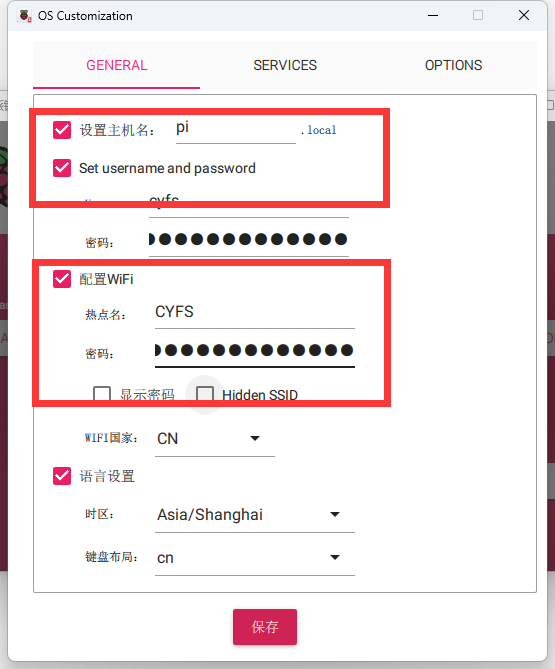
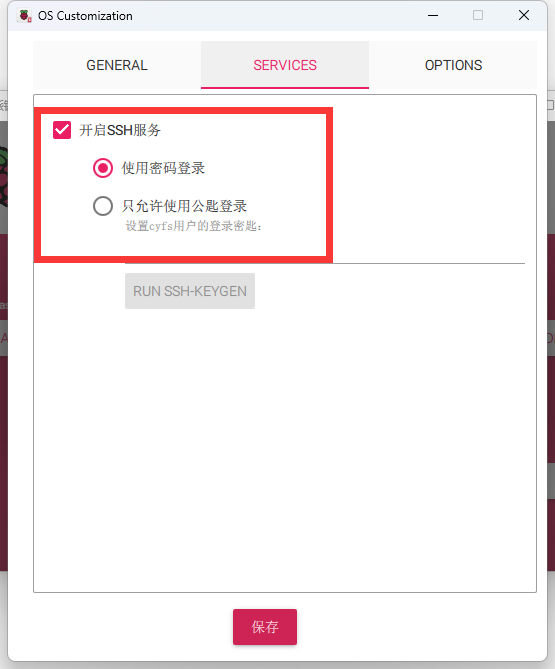
注意要打开SSH连接。
等待制卡完成即可。
二.SHH连接树莓派
需要将PC和树莓派处于同一个局域网内,这边我采用的是使用PC的网口与树莓派网口相连。
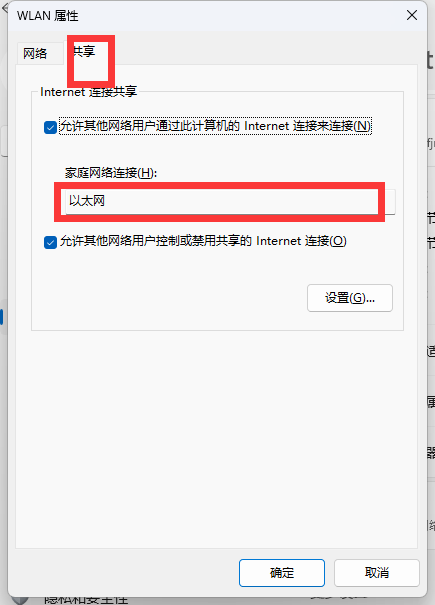
并把PC的网络共享给树莓派。
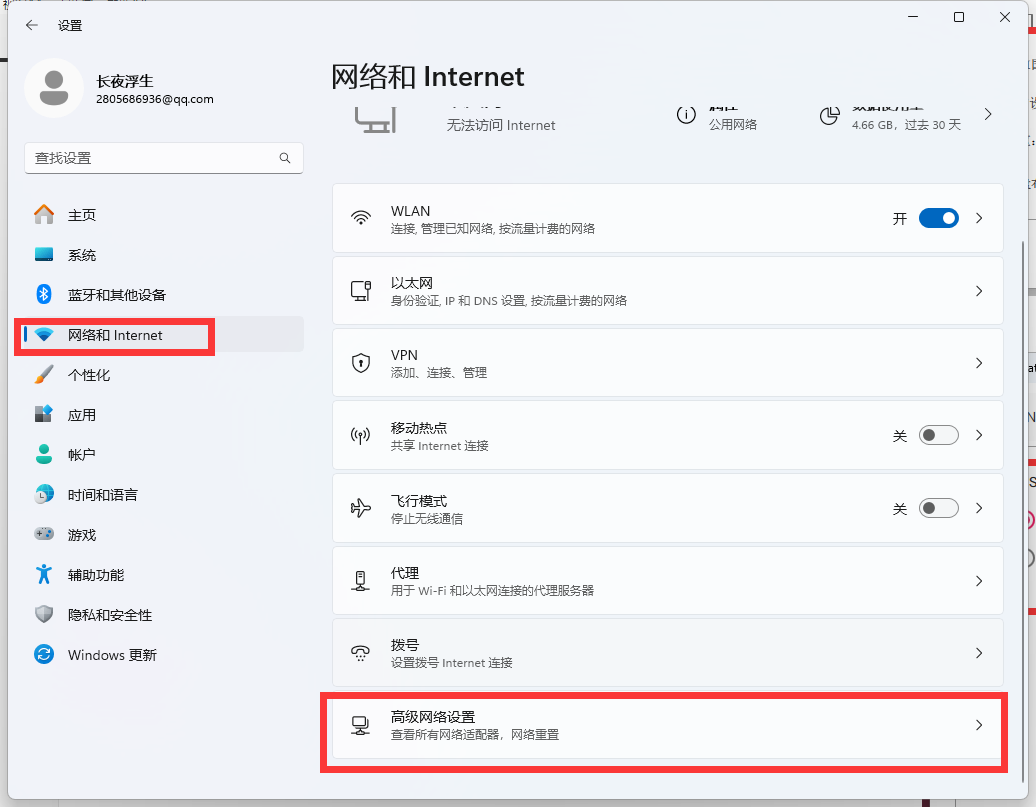
由于我的PC网络是通过网卡连接WIFI,所以我将wifi网络共享给以太网接口。

接下来使用ipscan22,扫描树莓派的ip
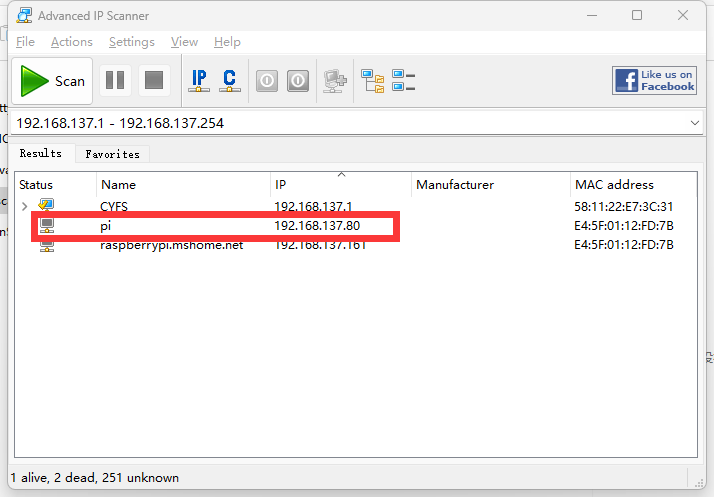
可以看到树莓派的Ip为192.168.137.80
使用MobaXterm创建一个新的SSH会话,填入上面扫描到的树莓派的地址。
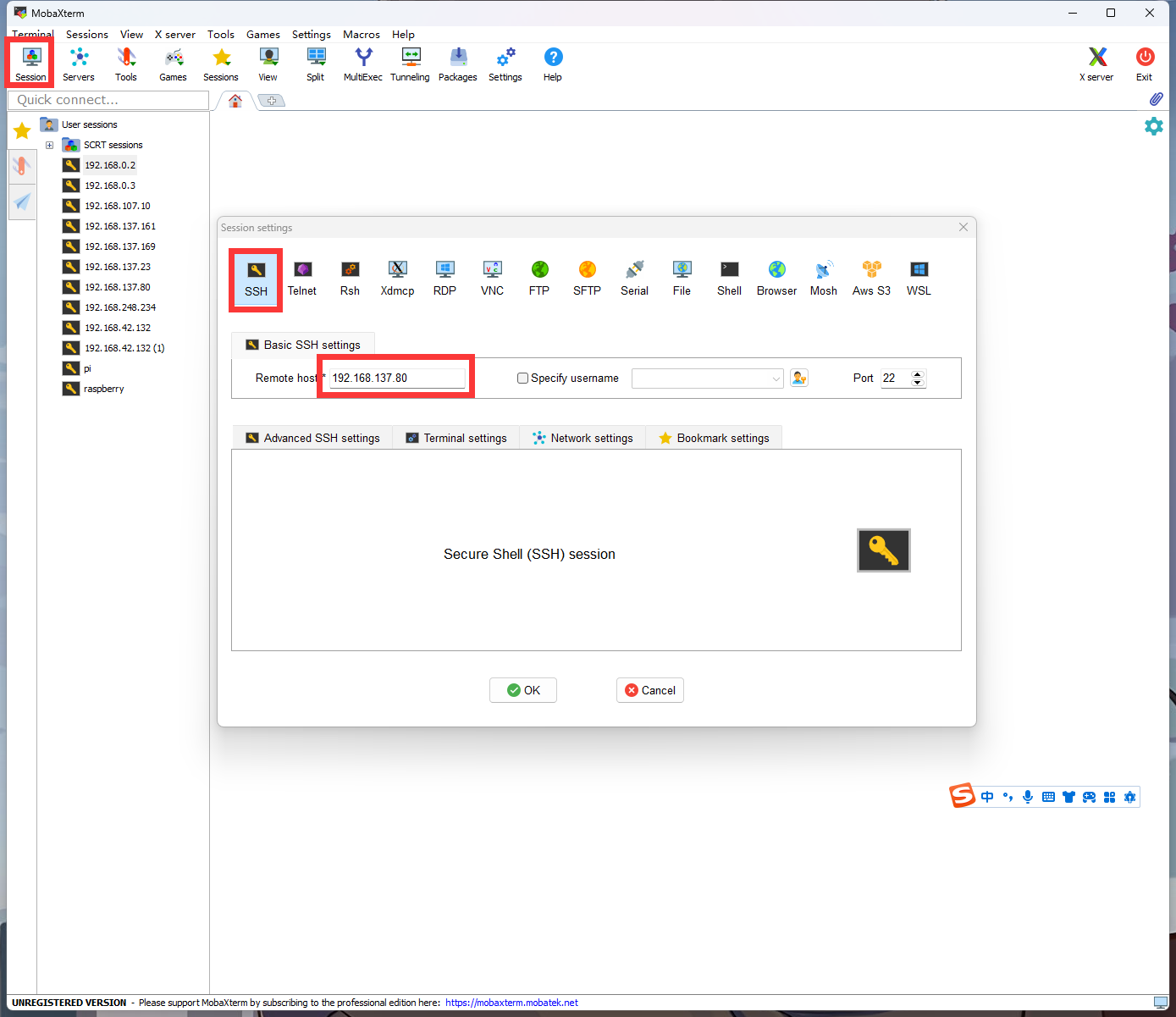
输入用户名以及密码。
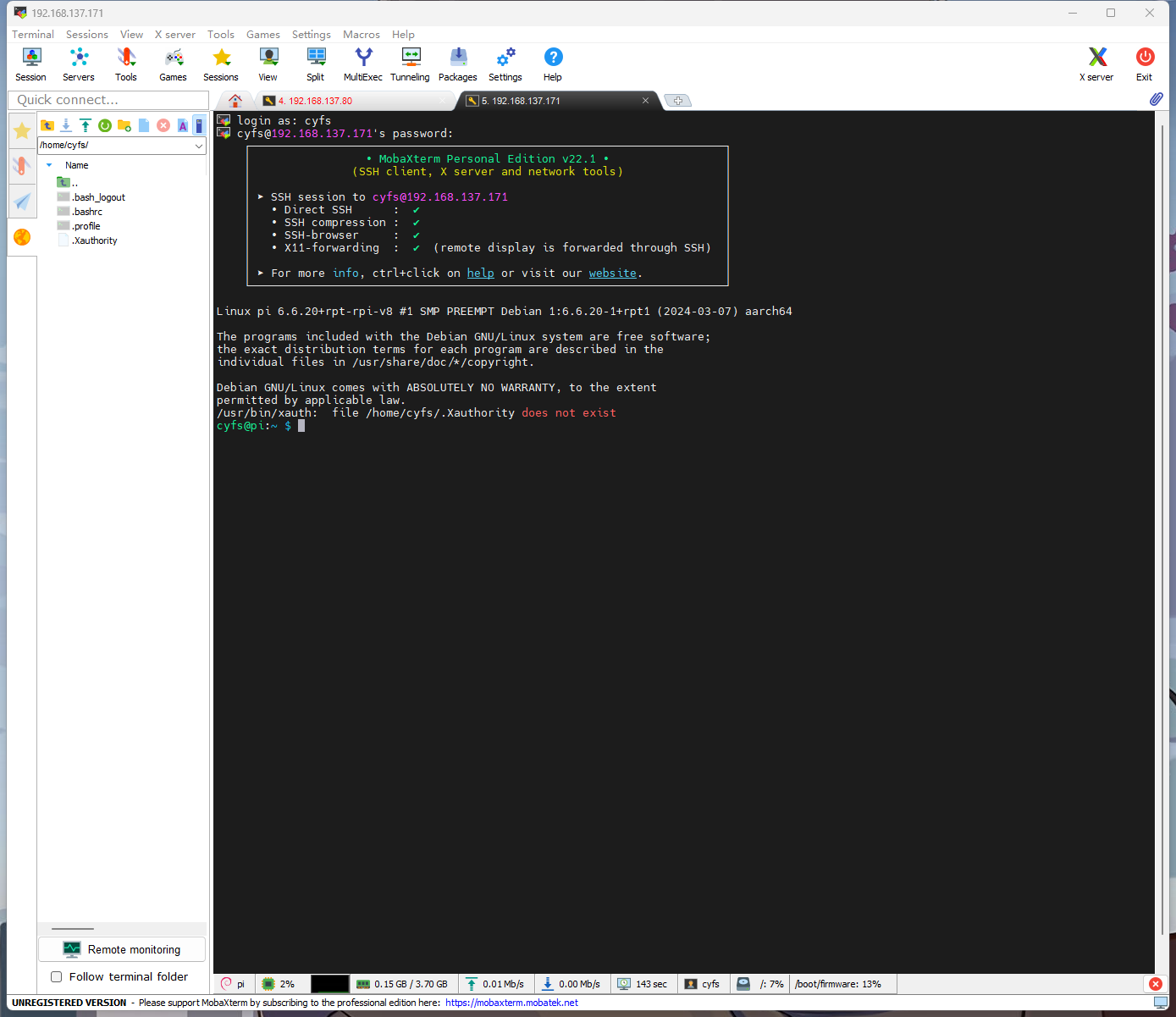
登录成功。
三、使用Miniforge3创建虚拟环境
Minicon3对aarch64的支持不是很好,所以使用Miniforge3来作为虚拟环境的管理工具。
注意:需要换源或者使用代理
1.安转Miniforge3
https://github.com/conda-forge/miniforge
下载aarch架构的安装包
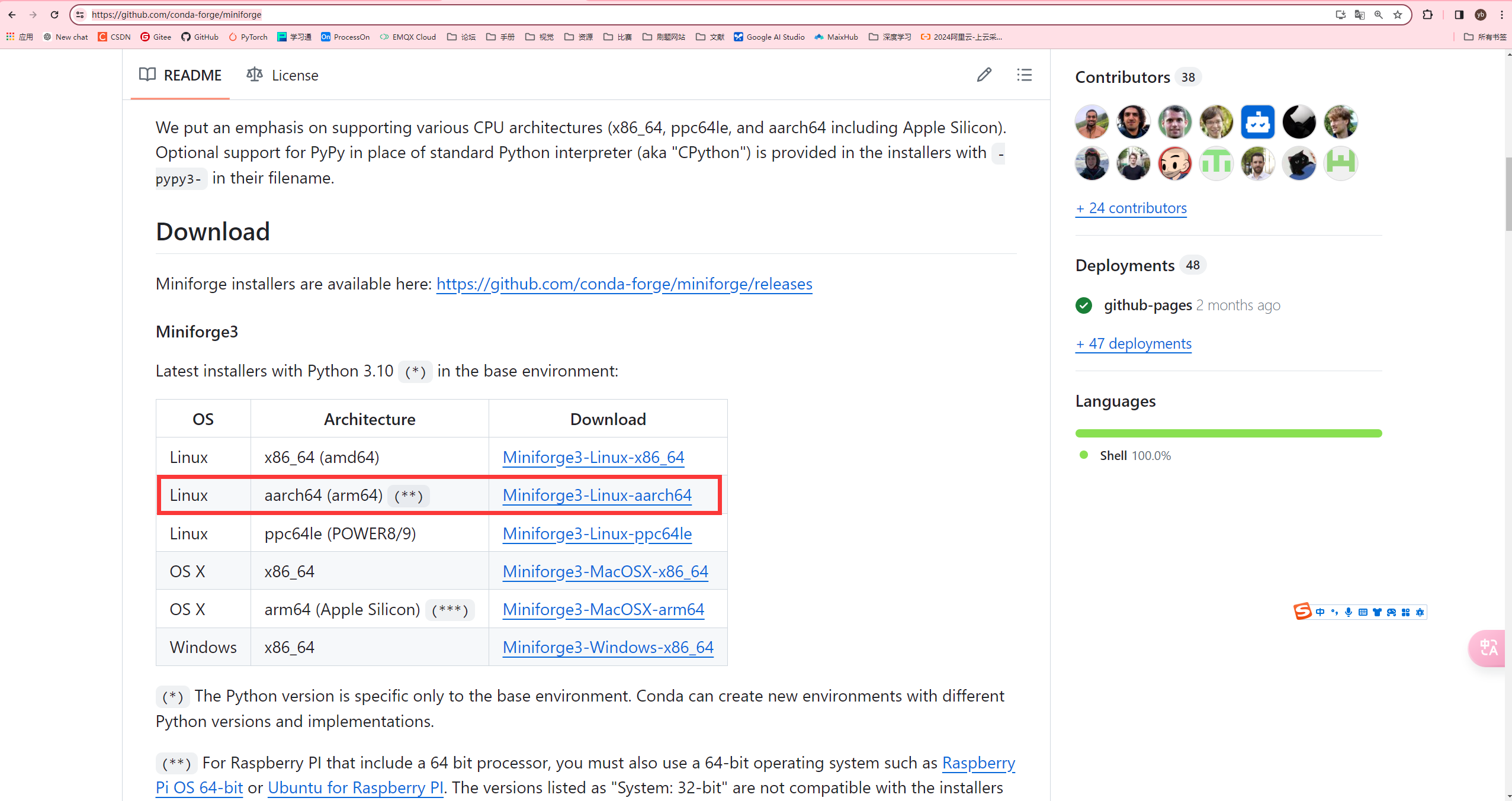
可以复制链接,到树莓派使用wget获取,也可以先在PC端下载,之后使用MobaXterm上传文件。
下面演示使用wget获取
wget https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-Linux-aarch64.sh
增加可执行权限,执行安装包
chmod +x Miniforge3-Linux-aarch64.sh
./Miniforge3-Linux-aarch64.sh
安装步骤按提示要求输入即可。
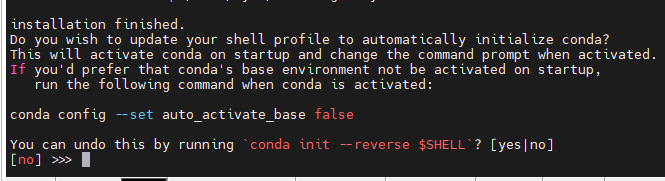
可以输入yes,这样就不用每次激活环境。
然后输入source ~/.bashrc 重新激活bash配置。

可以看到conda的环境被激活了。
2.创建一个新的虚拟环境
使用的py版本为3.7(因为更高版本好像没有cv以及onnxruntime库需要自己编译)
conda create -n onnx python=3.7
激活onnx环境
conda actiavte onnx
安装opencv以及onnxruntime
pip install opencv-python
pip install onnxruntime
检验一下cv以及onnxruntime有没有安装成功

可以看到在导入cv时报错!
ImportError: libGL.so.1: cannot open shared object file: No such file or directory
这个libGL.so.1是openGL的共享库。我们可以通过apt安装
sudo apt-get update
sudo apt-get install -y libgl1-mesa-glx libglib2.0-0
此时在导入cv时就不会报错。

四、准备onnx
1.下载yolov5
可以克隆或者下载yolov5-lite的仓库
https://github.com/ppogg/YOLOv5-Lite
yolov5-lite是由国内大佬ppogg开源的轻量化模型。
2.训练模型
可以参考redme或者网上的其他资料,本文章不做具体的介绍
3. pt转换onnx
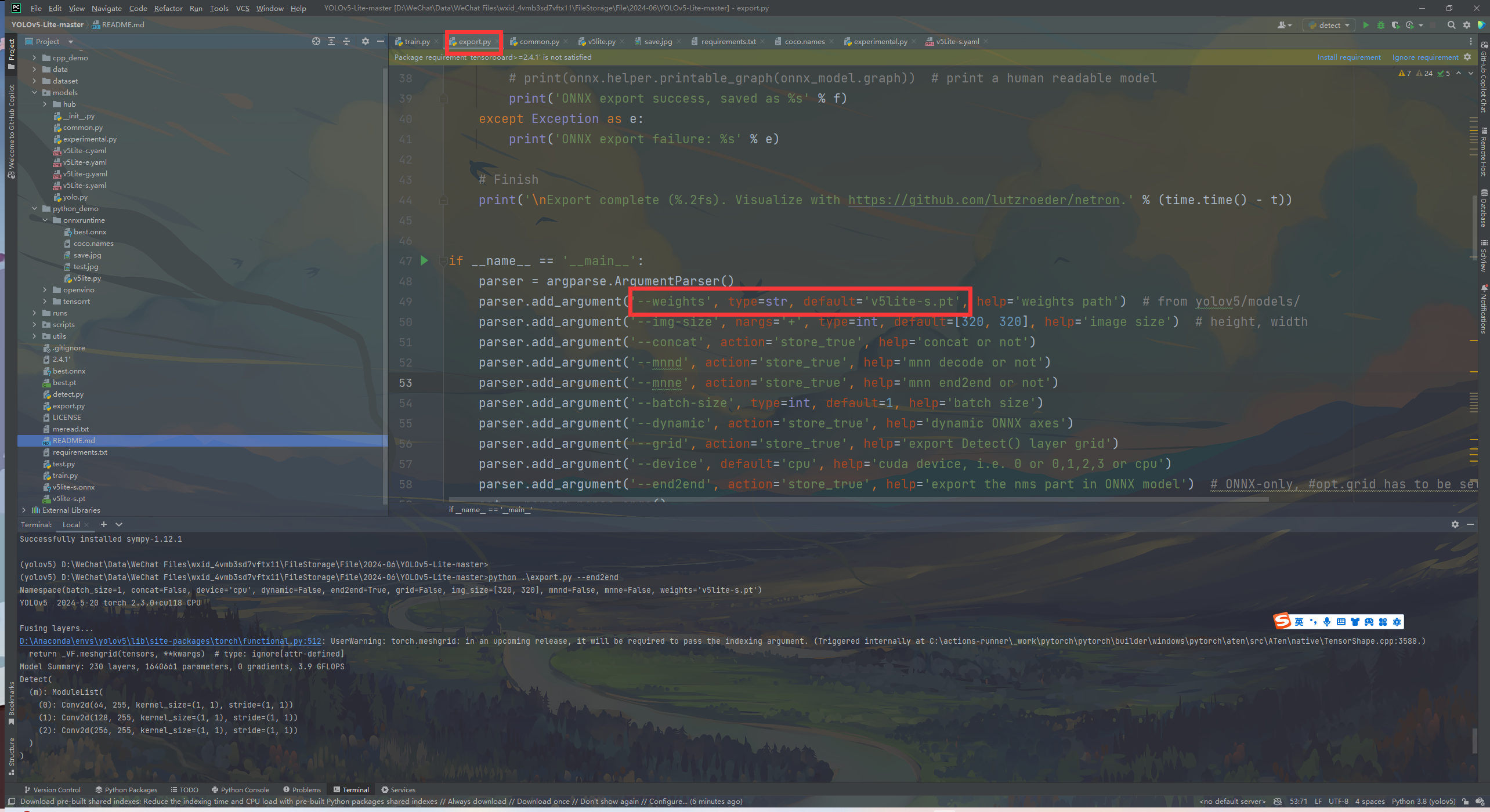
把weights改成自己训练好模型路径
python .\export.py --end2end
使用end2end的作用:
–把后处理写在模型了,推理时就不用写后处理
五、部署到树莓派
通过MobaXterm上传onnx模型
推理代码如下
import argparse
import cv2
import numpy as np
import onnxruntime as ort
import time
class yolov5_lite():
def __init__(self, model_pb_path, label_path, confThreshold=0.5, nmsThreshold=0.5):
so = ort.SessionOptions()
so.log_severity_level = 3
self.net = ort.InferenceSession(model_pb_path, so)
self.classes = list(map(lambda x: x.strip(), open(label_path, 'r').readlines()))
self.confThreshold = confThreshold
self.nmsThreshold = nmsThreshold
self.input_shape = (self.net.get_inputs()[0].shape[2], self.net.get_inputs()[0].shape[3])
def letterBox(self, srcimg, keep_ratio=True):
top, left, newh, neww = 0, 0, self.input_shape[0], self.input_shape[1]
if keep_ratio and srcimg.shape[0] != srcimg.shape[1]:
hw_scale = srcimg.shape[0] / srcimg.shape[1]
if hw_scale > 1:
newh, neww = self.input_shape[0], int(self.input_shape[1] / hw_scale)
img = cv2.resize(srcimg, (neww, newh), interpolation=cv2.INTER_AREA)
left = int((self.input_shape[1] - neww) * 0.5)
img = cv2.copyMakeBorder(img, 0, 0, left, self.input_shape[1] - neww - left, cv2.BORDER_CONSTANT,
value=0) # add border
else:
newh, neww = int(self.input_shape[0] * hw_scale), self.input_shape[1]
img = cv2.resize(srcimg, (neww, newh), interpolation=cv2.INTER_AREA)
top = int((self.input_shape[0] - newh) * 0.5)
img = cv2.copyMakeBorder(img, top, self.input_shape[0] - newh - top, 0, 0, cv2.BORDER_CONSTANT, value=0)
else:
img = cv2.resize(srcimg, self.input_shape, interpolation=cv2.INTER_AREA)
return img, newh, neww, top, left
def postprocess(self, frame, outs, pad_hw):
newh, neww, padh, padw = pad_hw
frameHeight = frame.shape[0]
frameWidth = frame.shape[1]
ratioh, ratiow = frameHeight / newh, frameWidth / neww
classIds = []
confidences = []
boxes = []
for detection in outs:
scores, classId = detection[4], detection[5]
if scores > self.confThreshold: # and detection[4] > self.objThreshold:
x1 = int((detection[0] - padw) * ratiow)
y1 = int((detection[1] - padh) * ratioh)
x2 = int((detection[2] - padw) * ratiow)
y2 = int((detection[3] - padh) * ratioh)
classIds.append(classId)
confidences.append(scores)
boxes.append([x1, y1, x2, y2])
# # Perform non maximum suppression to eliminate redundant overlapping boxes with
# # lower confidences.
indices = cv2.dnn.NMSBoxes(boxes, confidences, self.confThreshold, self.nmsThreshold)
for ind in indices:
frame = self.drawPred(frame, classIds[ind], confidences[ind], boxes[ind][0], boxes[ind][1], boxes[ind][2], boxes[ind][3])
return frame
def drawPred(self, frame, classId, conf, x1, y1, x2, y2):
# Draw a bounding box.
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 0, 255), thickness=2)
label = '%.2f' % conf
text = '%s:%s' % (self.classes[int(classId)], label)
# Display the label at the top of the bounding box
labelSize, baseLine = cv2.getTextSize(text, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
y1 = max(y1, labelSize[1])
cv2.putText(frame, text, (x1, y1 - 10), cv2.FONT_HERSHEY_TRIPLEX, 0.5, (0, 255, 0), thickness=1)
return frame
def detect(self, srcimg):
img, newh, neww, top, left = self.letterBox(srcimg)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = img.astype(np.float32) / 255.0
blob = np.expand_dims(np.transpose(img, (2, 0, 1)), axis=0)
t1 = time.time()
outs = self.net.run(None, {self.net.get_inputs()[0].name: blob})[0]
cost_time = time.time() - t1
print(outs.shape)
srcimg = self.postprocess(srcimg, outs, (newh, neww, top, left))
infer_time = 'Inference Time: ' + str(int(cost_time * 1000)) + 'ms'
cv2.putText(srcimg, infer_time, (5, 20), cv2.FONT_HERSHEY_TRIPLEX, 0.5, (0, 0, 0), thickness=1)
return srcimg
if __name__ == "__main__":
parser = argparse.ArgumentParser()
# parser.add_argument('--imgpath', type=str, default='image.jpg', help="image path")
parser.add_argument('--modelpath', type=str, default='best.onnx', help="onnx filepath")
parser.add_argument('--classfile', type=str, default='xxx.names', help="classname filepath")
parser.add_argument('--confThreshold', default=0.5, type=float, help='class confidence')
parser.add_argument('--nmsThreshold', default=0.6, type=float, help='nms iou thresh')
args = parser.parse_args()
net = yolov5_lite(args.modelpath, args.classfile, confThreshold=args.confThreshold, nmsThreshold=args.nmsThreshold)
#Capture
video = 0
cap = cv2.VideoCapture(video)
flag_det = True
while True:
success, img0 = cap.read()
if success:
if flag_det:
t1 = time.time()
img0 = net.detect(img0.copy())
t2 = time.time()
str_FPS = "FPS: %.2f" % (1. / (t2 - t1))
cv2.putText(img0, str_FPS, (50, 50), cv2.FONT_HERSHEY_COMPLEX, 1, (0, 255, 0), 3)
cv2.imshow("video", img0)
key = cv2.waitKey(1) & 0xFF
if key == ord('q'):
break
elif key & 0xFF == ord('s'):
flag_det = not flag_det
print(flag_det)
cap.release()
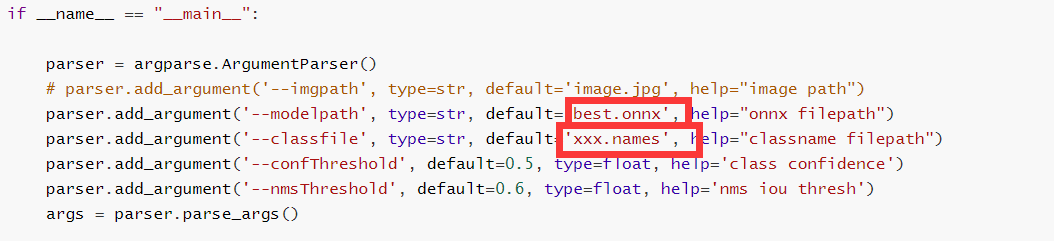
把模型改成自己的模型文件,xxx.names改完自己的标签。
六、树莓派镜像
为了方便大家使用,我将上面所用的的环境以及工具打包了,有需要的自行下载。
FAQ
qt.qpa.plugin: Could not load the Qt platform plugin “xcb” in “/home/cyfs/miniforge3/envs/onnx/lib/python3.7/site-packages/cv2/qt/plugins” even though it was found. This application failed to start because no Qt platform plugin could be initialized. Reinstalling the application may fix this problem. Available platform plugins are: xcb. Aborted
可能会遇到这样的错误,解决方法
把通过pip 下载的opencv卸载,使用conda安装
pip unstall opencv-python
conda install opencv















 1912
1912

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









