






基于YOLOv8的车道线智能检测与识别
一、引言
随着人工智能技术的飞速发展,自动驾驶技术成为了当前研究的热点。在自动驾驶技术中,车道线的智能检测与识别是至关重要的一个环节。本文将介绍一个基于YOLOv8算法的车道线智能检测与识别,该采用BDD100K带标签数据集进行模型训练,并通过pyqt5设计友好的用户界面,以实现高效、准确的车道线检测与识别。
二、数据集与模型训练
-
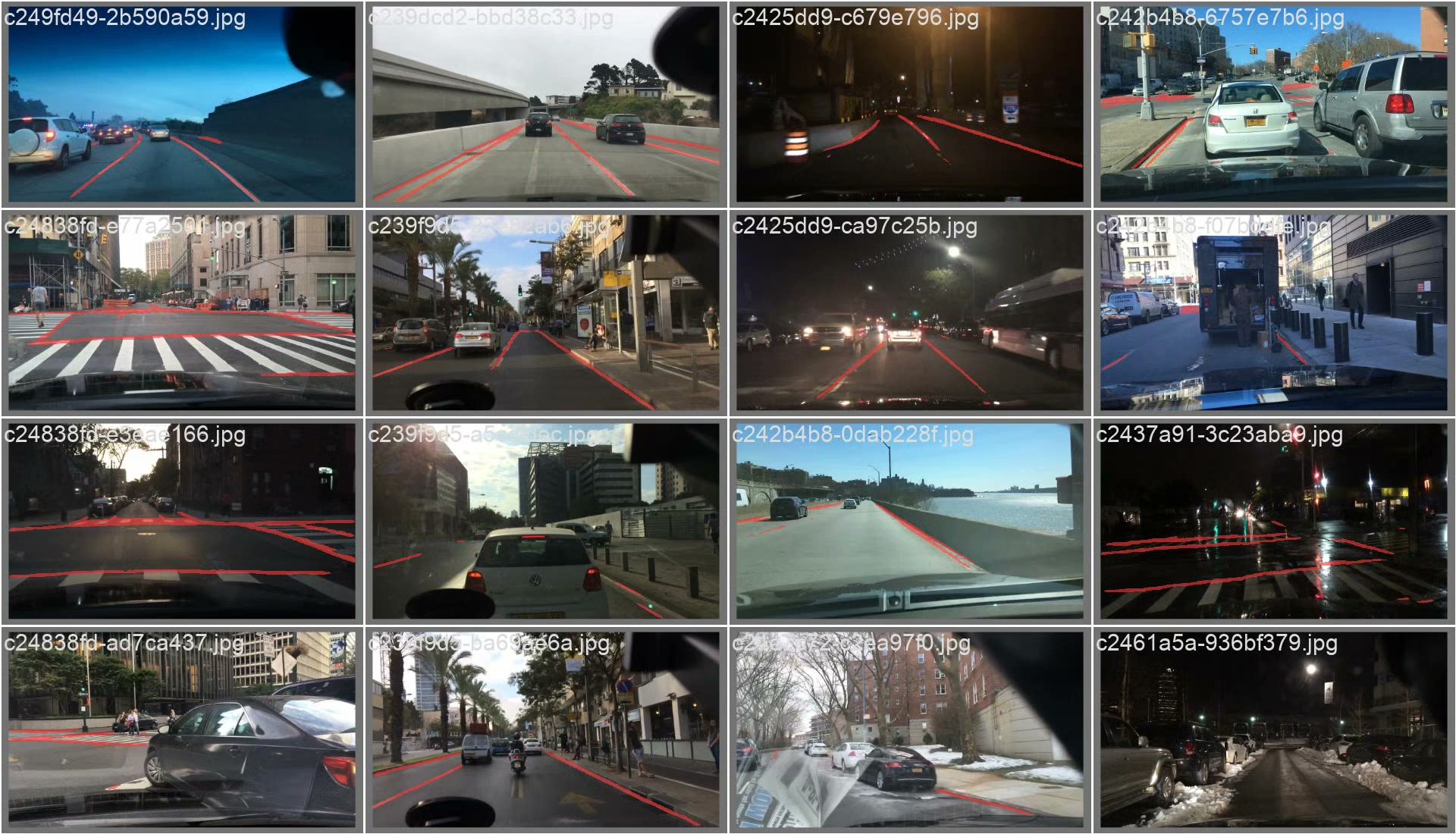
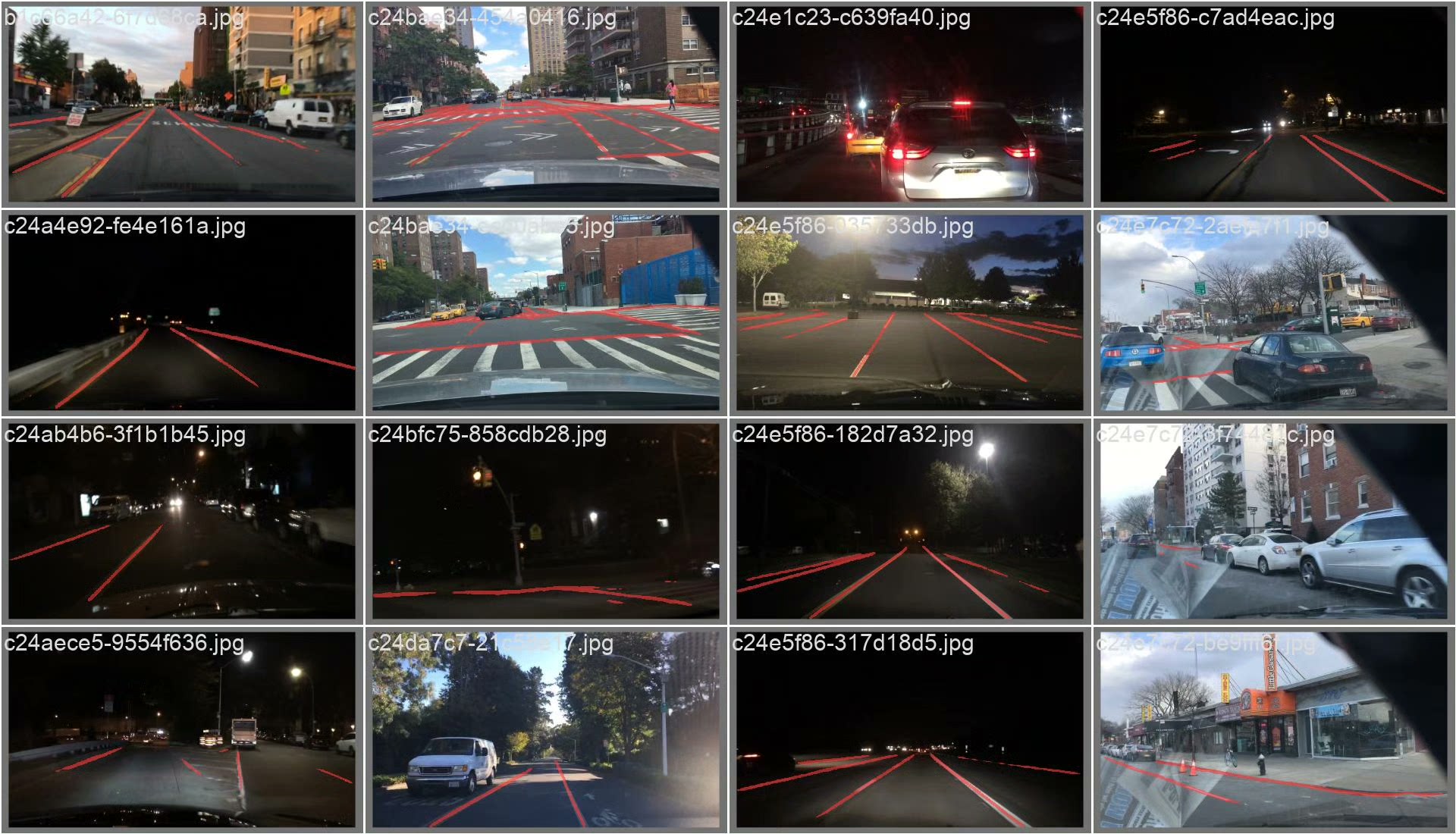
带标签数据集:BDD100K
本采用BDD100K数据集进行训练,该数据集包含大量带有标签的图像数据,可用于训练深度学习模型。在训练过程中,通过将数据集中的图像输入到模型中,可以有效地提高模型的检测与识别能力。 -
模型训练权重
在模型训练过程中,我们将使用YOLOv8算法进行训练,并保存训练过程中的模型权重。这些权重将用于后续的车道线检测与识别。 -
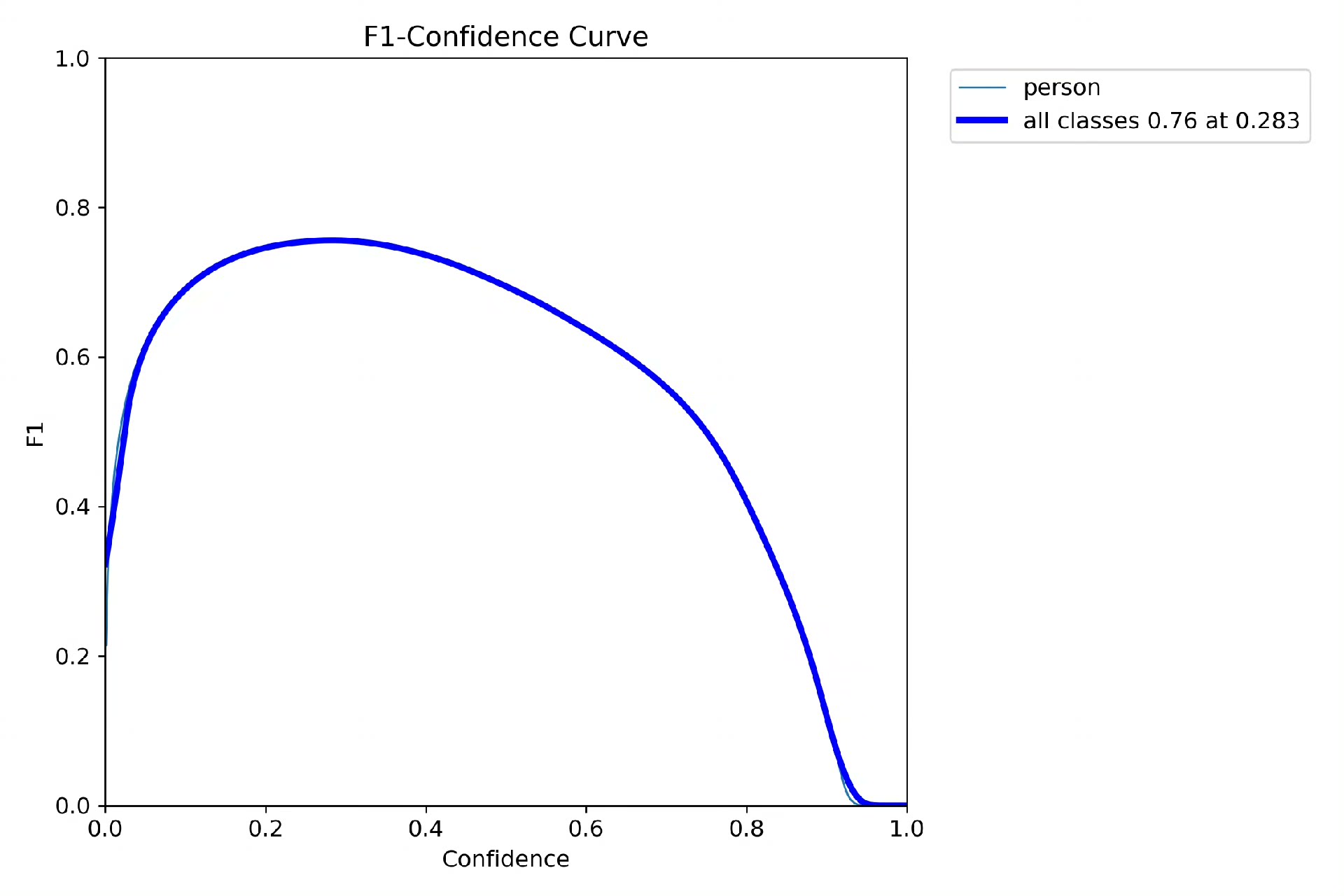
可视化指标
为了评估模型的性能,我们将采用F1、准确率、召回率、mAP等可视化指标。这些指标将帮助我们更好地了解模型的检测与识别效果,以便进行后续的优化与改进。
三、算法原理介绍
YOLOv8算法是一种基于深度学习的目标检测算法,其核心思想是将目标检测任务转化为回归问题。该算法通过在图像中划分网格,并在每个网格上预测一组固定数量的边界框,从而实现目标的检测与识别。在车道线检测与识别任务中,YOLOv8算法可以有效地提取车道线的特征,并准确地识别车道线的位置与形状。
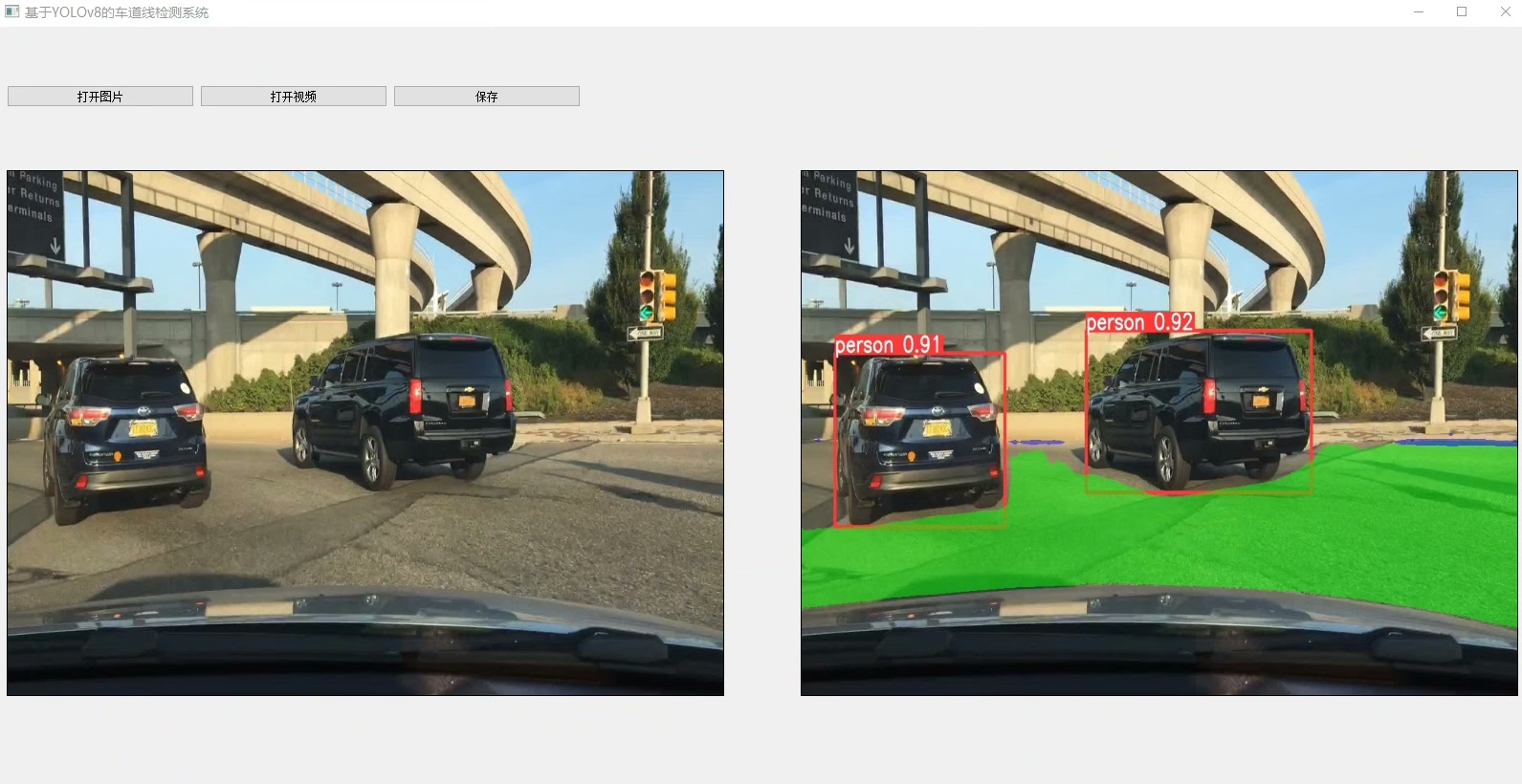
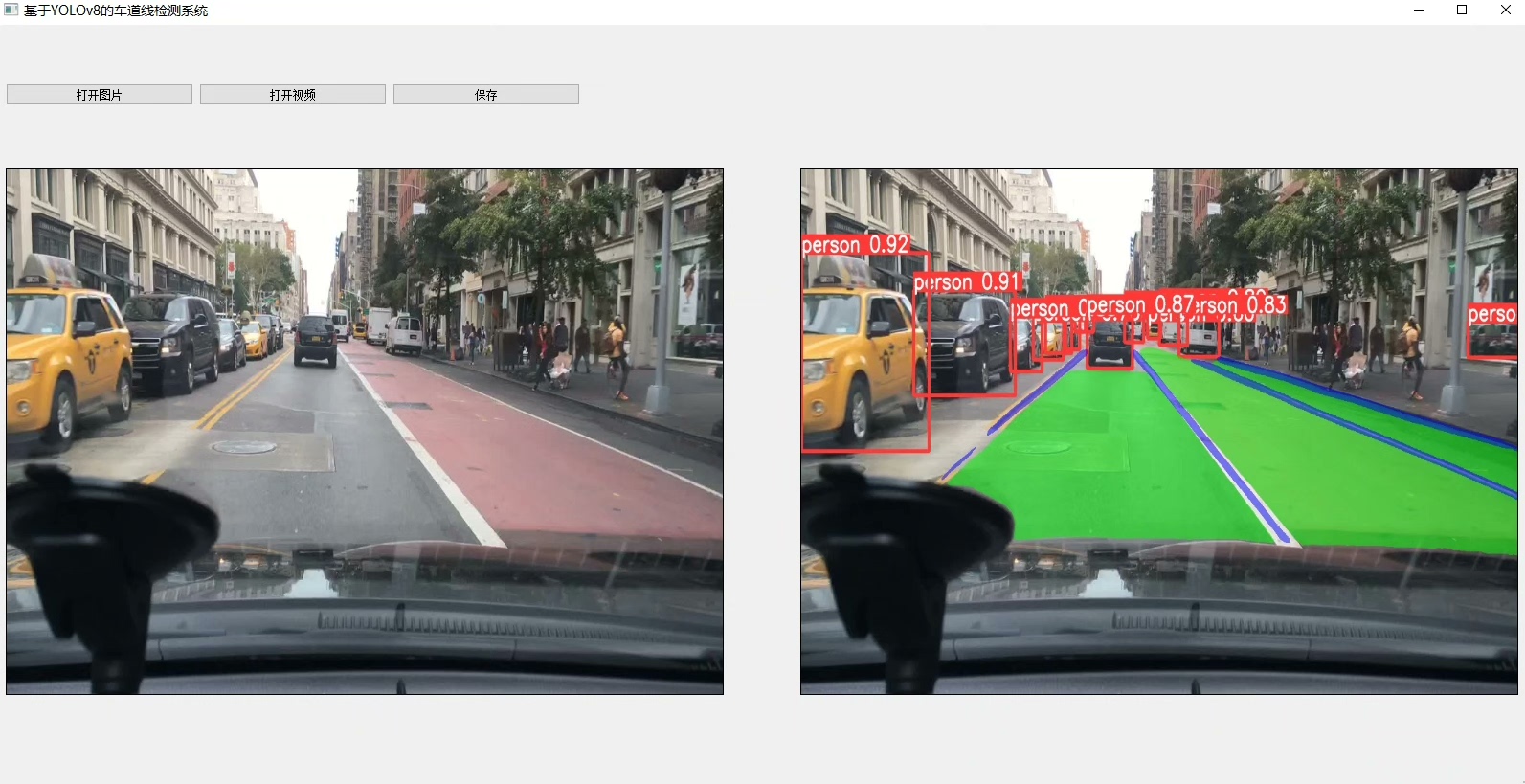
四、pyqt5设计的界面
本采用pyqt5设计友好的用户界面,以便用户可以方便地进行车道线检测与识别的操作。界面将包括图像显示区域、控制按钮以及检测结果展示区域等部分。用户可以通过点击控制按钮,将待检测的图像输入到中,将自动进行车道线的检测与识别,并将结果展示在界面上。
五、环境部署说明
本的环境部署主要包括硬件环境和环境两部分。硬件环境需要配备高性能的计算机,以便支持深度学习模型的训练与推理。环境需要安装Python、PyTorch等深度学习框架,以及pyqt5等GUI开发工具。在部署过程中,需要按照要求配置好相应的环境,并安装好必要的依赖库。
六、总结
本文介绍了一个基于YOLOv8算法的车道线智能检测与识别,该采用BDD100K带标签数据集进行模型训练,并采用pyqt5设计友好的用户界面。通过详细的算法原理介绍和环境部署说明,可以帮助读者更好地了解该的实现原理和部署方法。在未来的研究中,我们将继续优化模型性能,提高车道线检测与识别的准确性和效率,为自动驾驶技术的发展做出更大的贡献。
十、基于YOLOv8的车道线智能检测与识别
1.带标签数据集,BDD100K。
2.含模型训练权重和可视化指标,包括F1,准确率,召回率,mAP等。
3.pyqt5设计的界面。
4.提供详细的环境部署说明和算法原理介绍。


















 503
503

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









