







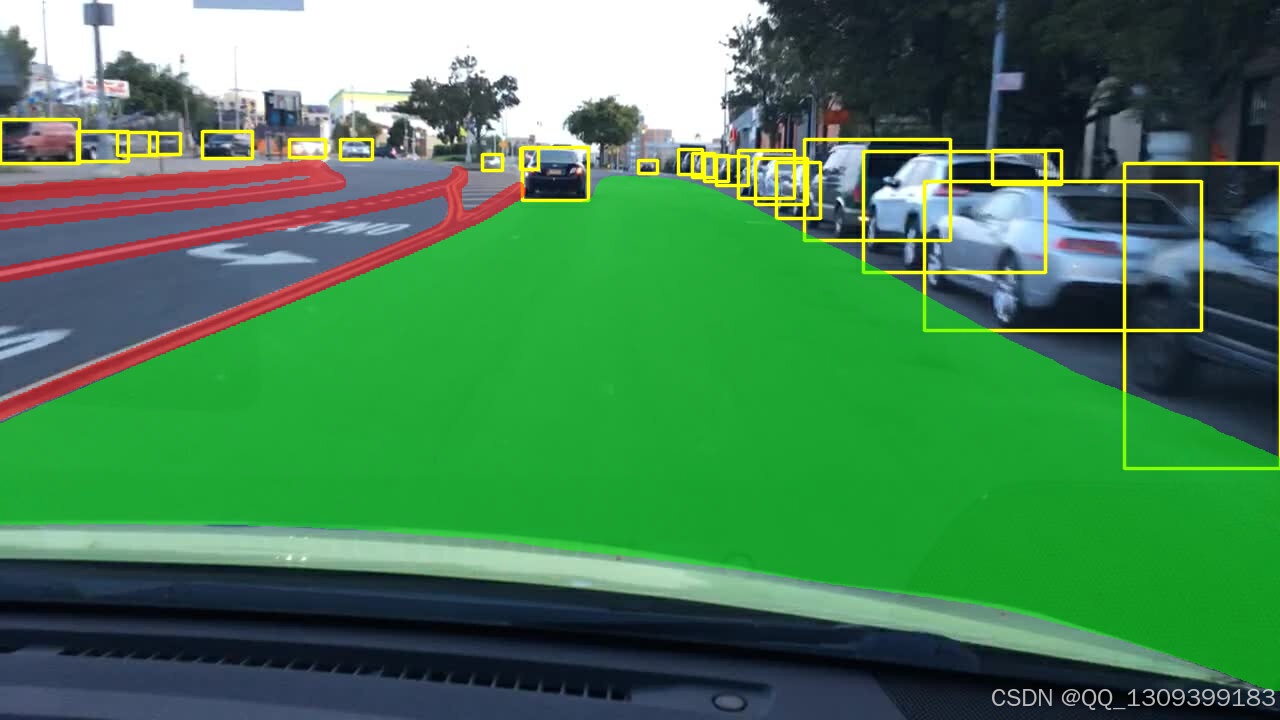
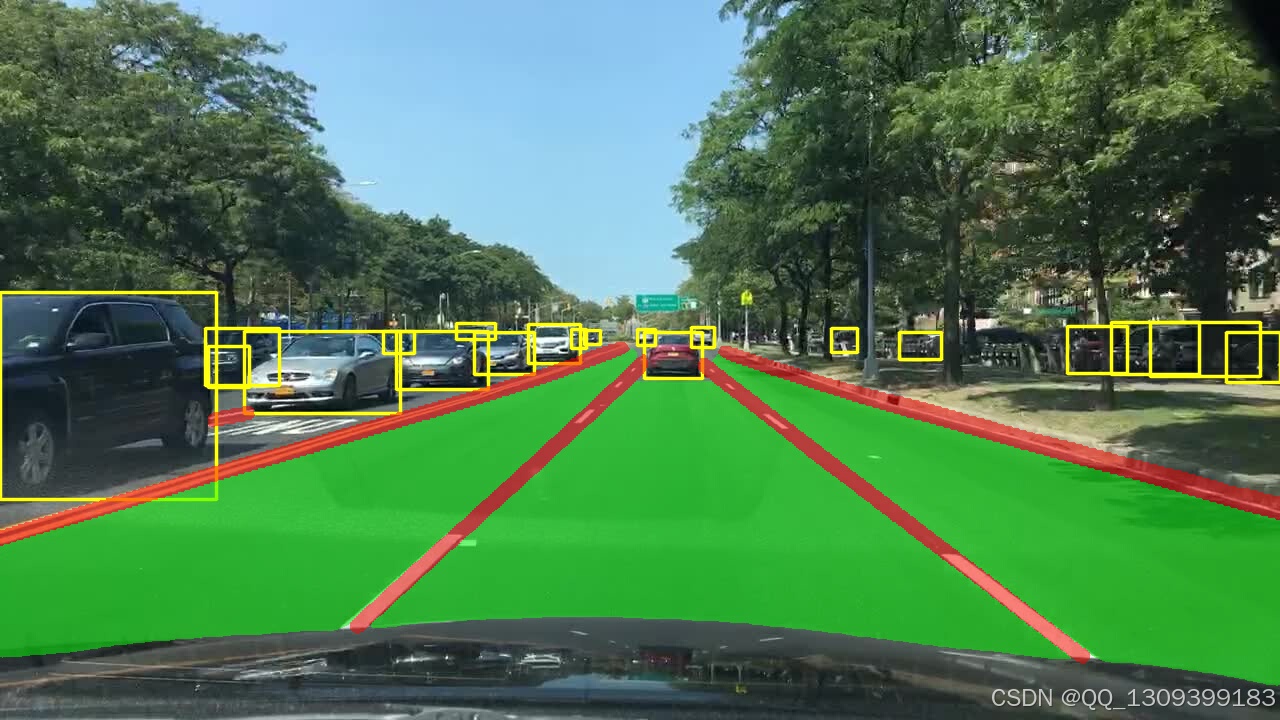
YOLO车道线识别 + 目标检测 + 可行驶区域(Freespace)的综合应用
引言
随着自动驾驶技术和智能交通系统的迅速发展,车辆环境感知技术变得愈加重要。准确地理解周围环境对于确保自动驾驶的安全性和可靠性至关重要。在众多的环境感知任务中,车道线识别、目标检测以及可行驶区域(freespace)检测是三个关键组成部分。本文将探讨如何结合YOLO系列算法来实现这三项功能,并介绍其在自动驾驶中的应用。
一、YOLO系列算法概述
YOLO (You Only Look Once) 是一种实时的目标检测框架,因其快速和高效而广受欢迎。从最早的YOLOv1到最新的版本如YOLOv8,该系列算法不断进化,在速度和准确性之间找到了良好的平衡。YOLO的特点在于它将目标检测问题转化为一个回归问题,直接从图像中预测边界框和类别概率,从而实现了端到端的学习。

二、YOLO应用于车道线识别
传统上,车道线识别通常使用基于规则的方法,例如Hough变换或边缘检测等。然而,这些方法容易受到光照变化、阴影以及其他复杂路况的影响。近年来,深度学习方法逐渐取代了传统的计算机视觉技术,因为它们能够更好地处理多样化的道路条件。
使用YOLO进行车道线识别时,我们可以训练网络以识别特定形状的车道标记(如实线、虚线),并且还可以扩展到其他类型的地面标识。为了适应这种特殊的应用场景,通常需要对原始YOLO架构做一些调整,比如改变损失函数或者添加额外的输出层来预测车道线的位置和类型。此外,还可以利用YOLO的多尺度特征提取能力来增强对不同宽度和距离上的车道线的识别效果。
三、YOLO用于目标检测
在自动驾驶场景下,除了要识别车道线外,还需要检测道路上的各种物体,包括行人、车辆、交通标志和其他潜在障碍物。YOLO凭借其高效的性能成为理想的选择之一。通过适当的标注数据集训练,YOLO可以学会区分不同的物体类别并提供精确的位置信息。这对于保障行车安全来说非常重要,因为它可以帮助系统提前做出反应,避免碰撞事故的发生。
为了提高检测精度,研究人员提出了许多改进措施,例如引入注意力机制、设计更深更宽的网络结构以及优化非极大值抑制(NMS)算法等。同时,考虑到计算资源的限制,轻量化模型的设计也成为了一个研究热点,旨在保持高性能的同时降低功耗和延迟。
四、YOLO与Freespace检测
可行驶区域(freespace)指的是车辆前方没有障碍物且可以安全行驶的空间范围。准确估计freespace有助于规划合理的驾驶路径,尤其是在城市环境中,存在大量的静态和动态障碍物。传统的freespace检测方法主要依赖于激光雷达(LiDAR)或立体相机提供的深度信息,但这类传感器成本较高且易受天气影响。
相比之下,基于单目摄像头的视觉方法更加经济实惠,同时也具有较强的鲁棒性。YOLO可以通过学习图像中物体之间的相对位置关系来推断出哪些区域是可以通行的。具体而言,YOLO可以被用来检测道路上的所有对象,然后根据这些对象的分布情况判断出未被占据的空间即为freespace。这种方法不仅简单有效,而且易于集成到现有的自动驾驶系统中。
五、综合应用及挑战
将YOLO应用于车道线识别、目标检测和freespace检测,构成了一个完整的环境感知解决方案。这一方案的优势在于它可以共享同一个神经网络,减少了硬件需求并提高了效率。但是,实际部署过程中也面临着一些挑战:
- 多任务学习:如何有效地整合多个任务,使得每个任务都能得到足够的关注而不互相干扰。
- 实时性要求:保证所有任务都在限定时间内完成处理,满足自动驾驶系统对低延迟的要求。
- 环境适应性:面对各种复杂的道路状况和气候条件,确保系统依然稳定可靠。
- 安全性考量:任何错误都可能导致严重的后果,因此必须采取严格的测试和验证流程。

六、未来展望
尽管已经取得了显著的进步,但在自动驾驶领域还有很长的路要走。随着技术的发展,我们期待看到更多创新性的解决方案出现,例如结合其他先进的感知技术(如毫米波雷达)、引入更多的上下文信息(如地图数据)以及探索新的学习范式(如自监督学习)。最终目标是构建一个既智能又安全可靠的自动驾驶系统,让每个人都能享受到科技带来的便利。
def make_parser():
parser = argparse.ArgumentParser()
parser.add_argument('--weights', nargs='+', type=str, default='data/weights/yolopv2.pt', help='model.pt path(s)')
parser.add_argument('--source', type=str, default='data/example.jpg', help='source') # file/folder, 0 for webcam
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.3, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
parser.add_argument('--device', default='cpu', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--project', default='runs/detect', help='save results to project/name')
parser.add_argument('--name', default='exp', help='save results to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
return parser
代码获取
综上所述,YOLO作为一种强大的工具,在实现车道线识别、目标检测和freespace检测方面展现出了巨大的潜力。通过不断的研究和实践,我们相信这项技术将继续推动自动驾驶行业向前发展,为人们的生活带来更多可能性。
代码获取,见文章底部卡片!


















 784
784

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









