






 本文详细介绍了AEB系统的原理、控制策略和在Carsim和Simulink中的实现,探讨了模型设计、数据处理与优化,以及仿真实验对系统性能的影响。
本文详细介绍了AEB系统的原理、控制策略和在Carsim和Simulink中的实现,探讨了模型设计、数据处理与优化,以及仿真实验对系统性能的影响。
AEB紧急制动系统控制模型carsim+simulink可选模型说明文件和操作说明
ID:3588643224250795
用户_661928657
AEB紧急制动系统控制模型是现代汽车安全技术的一个重要组成部分。它是一种基于车辆动力学模拟的主动安全系统,旨在通过实时监测车辆与前方障碍物的距离和速度差异,以及驾驶员的制动输入,来实现自动刹车并减少碰撞风险。
本文将围绕AEB紧急制动系统控制模型展开详细的分析和介绍。首先,我们将对AEB系统的工作原理进行深入解析。其次,我们将介绍AEB系统的控制算法和逻辑,包括模型的设计思路、控制策略和制动力计算方法。然后,我们将详细描述AEB控制模型在Carsim和Simulink中的实现步骤,并提供相应的可选模型说明文件和操作说明。最后,我们将进行案例分析,通过仿真实验验证AEB系统的性能和效果,并讨论其在实际场景中的应用前景。
AEB紧急制动系统的核心在于实时感知和判断车辆与前方障碍物之间的距离和速度差异。这涉及到传感器的选择与安装、数据的采集与处理以及障碍物检测算法的设计与优化等方面。同时,AEB系统还需要与车辆的制动系统紧密配合,实现刹车力的精确控制和响应速度的提升。为了满足这些要求,我们可以采用一种基于模型预测控制(Model Predictive Control, MPC)的策略,通过预测障碍物与车辆之间的碰撞概率,来优化制动力的分配和调节。
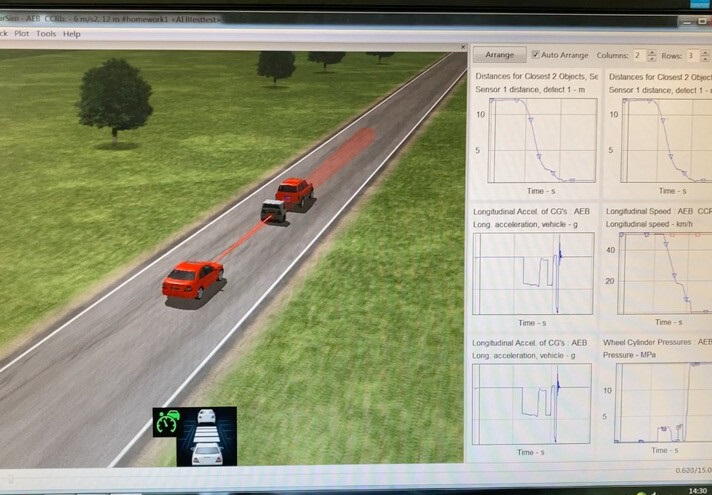
在Carsim和Simulink中实现AEB控制模型需要一系列步骤。首先,我们需要建立车辆的动力学模型,并根据实际车辆参数进行参数设置和校准。其次,我们需要搭建AEB系统的控制算法和模型,包括障碍物检测、制动力计算和控制策略等。然后,我们通过Carsim和Simulink的仿真环境,对AEB控制模型进行验证和优化。最后,我们根据需要,可以将AEB控制模型应用于实际车辆的测试和评估中。
通过仿真实验,我们可以评估AEB系统的性能和效果,并对其进行优化。例如,我们可以通过改变控制参数和调整制动力分配策略,来探索最佳的AEB系统配置方案。此外,我们还可以对AEB系统在不同路况和驾驶行为下的表现进行研究,以提高其适应性和可靠性。
AEB紧急制动系统控制模型是汽车安全技术中的一个重要研究方向。通过对其工作原理、控制算法和模型实现进行深入分析,我们可以更好地理解和应用AEB系统,为汽车安全性能的提升做出贡献。同时,我们也可以通过仿真实验和实际测试,验证和优化AEB系统的性能,以确保其在不同场景下的稳定性和可靠性。
总之,AEB紧急制动系统控制模型的研究和应用具有重要的意义。通过本文的介绍和分析,我们希望能够为相关研究者和从业人员提供指导和启发,以推动该领域的进一步发展和创新。
以上相关代码,程序地址:http://matup.cn/643224250795.html

















 5069
5069

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









