





 本文介绍了如何组装机器人手臂,包括所需的材料、组装过程和注意事项。作者分享了自己的经历,强调了耐心和注意细节的重要性。文章还提到了使用Arduino IDE和伺服器进行控制的初步步骤,为读者提供了进一步探索机器人技术的基础。
本文介绍了如何组装机器人手臂,包括所需的材料、组装过程和注意事项。作者分享了自己的经历,强调了耐心和注意细节的重要性。文章还提到了使用Arduino IDE和伺服器进行控制的初步步骤,为读者提供了进一步探索机器人技术的基础。
机器人组装
我写了一些有关软件开发,编码和Java相关主题的文章。 这次,我决定与您分享我做的一个更有趣的项目。 我是Arduinos,Pis和其他用于家庭自动化的平台的粉丝,并且对电子和机械学也很感兴趣。 为了更好地理解伺服器的工作方式,我决定制造自己的机器人手臂。 这一系列文章将详细介绍我的旅程以及取得的成就。 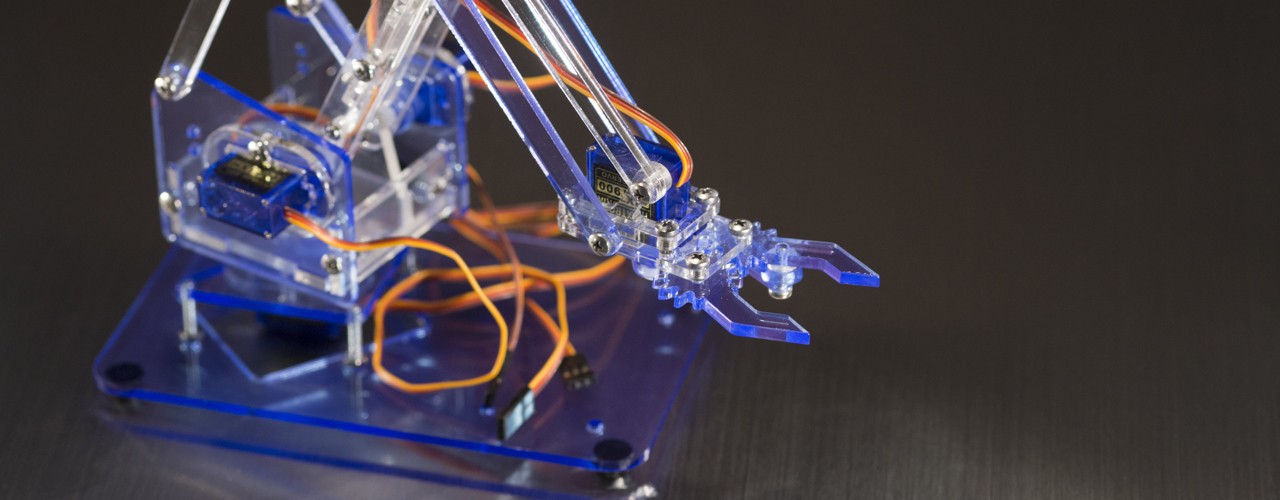
你需要什么
如果您正在考虑进行这样的项目,那么在此阶段您将需要做一些事情:
- MeArm套件(大约45欧元)
- 一块兼容Arduino的板(也支持Raspberry Pi)(Arduino UNO Rev3的价格约为20欧元)
- Arduino IDE
- 公跳线
- 十字螺丝刀
根据您选择的商店,此设置将花费您大约70欧元。
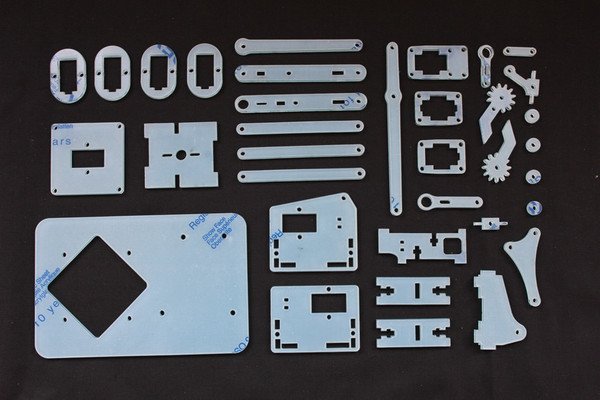
部件
当所有零件到达时,您可以开始组装过程。 您将使用几组零件,因此最好对它们进行分组。 第一组包含将构成机器人手臂主体的所有塑料部件。 组装前,请不要忘记从零件上卸下塑料保护盖。
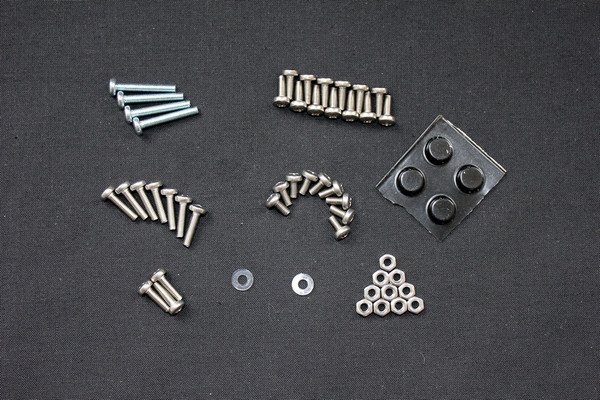
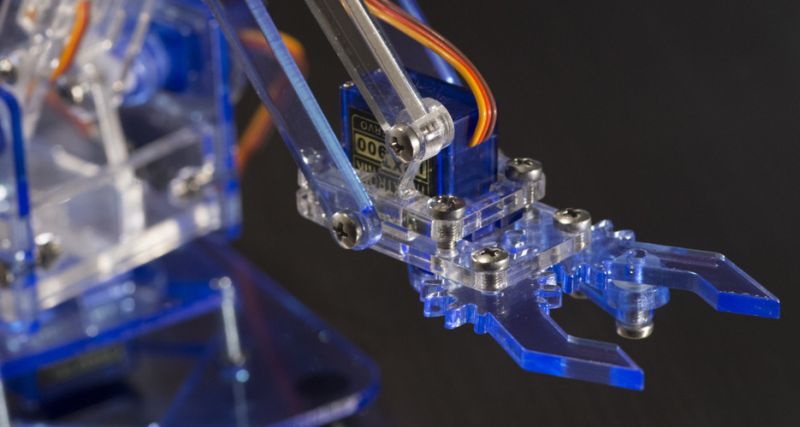
第二组零件是将塑料零件绑在一起的螺钉和螺母。 还有四个粘性脚,可以使平台更稳定。
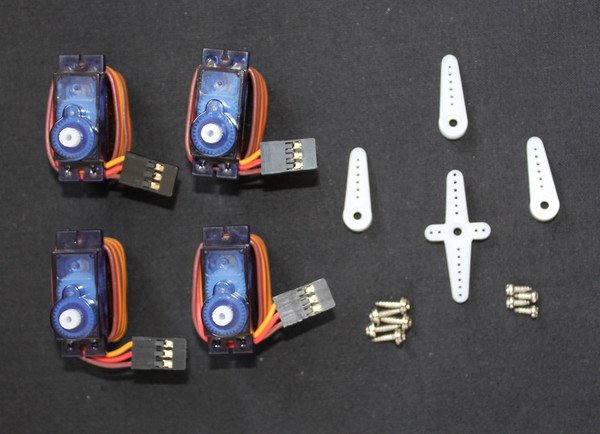
最后一组零件包括伺服器和附属零件,例如螺丝和塑料喇叭。
在线或PDF格式的可 指导教程中详细地描述了组装的整个过程。
几个陷阱
关于组装我想指出几件事:
- 不要着急
- 该组装将花费您几个小时才能正确安装,因此请不要着急并花费时间,以免损坏套件。
- 不要拧得太紧
- 除非您完全确定当前的版本,否则不要完全拧紧螺钉。
- 零件可能需要其他工作
- 对于您来说可能不是这种情况,但是我套件中的某些零件需要进行一些小的改动才能相互配合。
- 注意细节
- 组装是相当复杂的工作,因此您需要注意,以便您第一次就可以正确地进行组装。
- 不要期望太高(刚刚)
- 完成后–很酷。
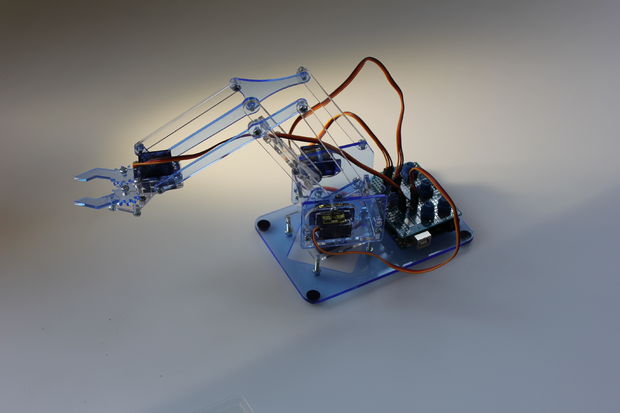
最终产品
如果成功完成构建,则应该可以看到与此设备类似的设备。 要验证构建物的物理属性,请确保仅通过自己移动即可感觉到舵机的运动自然。 您应该能够在它们的自然极限内自由移动它们,而不会碰到伺服机构的任何极限或结构的物理极限。
如果您像我一样不耐烦,那么您会感到急于在组装后立即移动它。 因此,请获取您的Arduino兼容板,几根电线并选择其中一个伺服器。
如果您以前对伺服系统的使用经验为零(就像我以前所做的那样),我很高兴告诉您这没问题。 关于Adafruit的伺服器,确实有一个很好的教程 ,它将向您展示使伺服器运动的所有步骤。 但是您基本上需要两件事–面包板布局和草图。 以下布局取自上述Adafruit教程,并显示了一种将伺服器连接到Arduino板的简单方法。
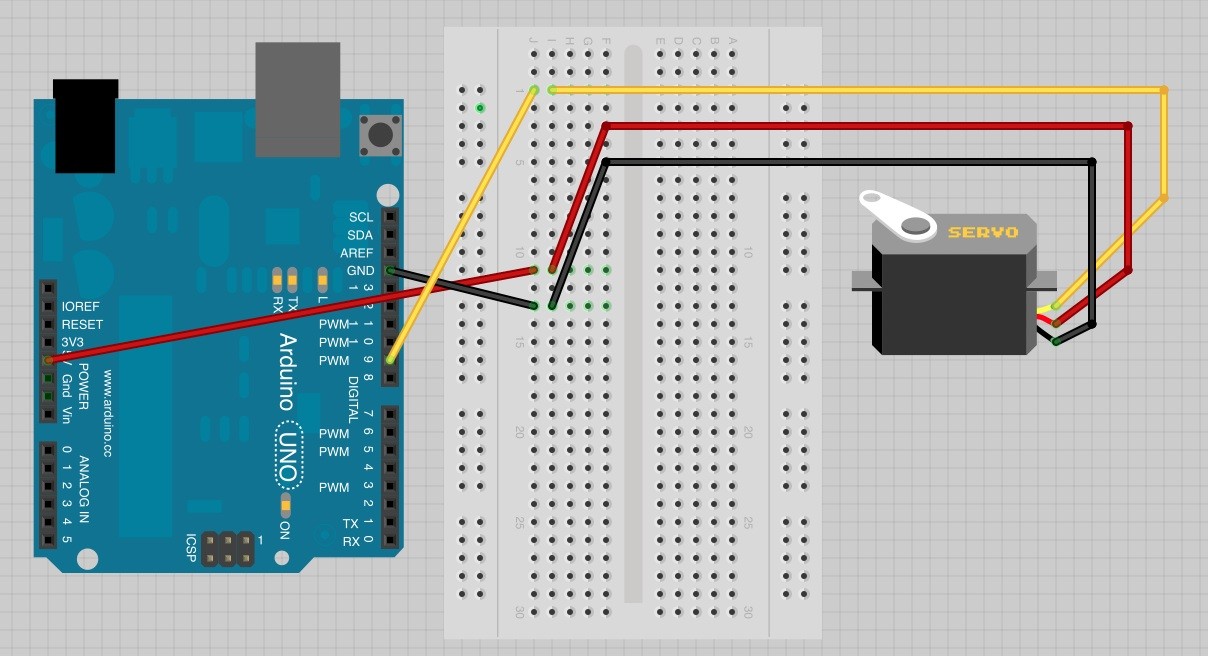
接下来,将此草图上传到您的Arduino并观看魔术的发生。 不要忘记更新您实际在草图中使用的引脚号。 就是这样。 现在,您应该会看到给定伺服电机上的横扫运动,这是一个很好的概念证明。
Adafruits扫素描
/*
Adafruit Arduino - Lesson 14. Sweep
*/
#include <Servo.h>
int servoPin = 9;
Servo servo;
int angle = 0; // servo position in degrees
void setup()
{
servo.attach(servoPin);
}
void loop()
{
// scan from 0 to 180 degrees
for(angle = 0; angle < 180; angle++)
{
servo.write(angle);
delay(15);
}
// now scan back from 180 to 0 degrees
for(angle = 180; angle > 0; angle--)
{
servo.write(angle);
delay(15);
}
}接下来是什么?
将所有零件放在一起并用我的双手创造出一些东西真是太有趣了。 这样的项目的一个重要方面是,您将可以考虑产品设计以及您的决策如何影响机械臂的功能。 面向未来的产品设计师的出色思维练习。 而且,这还带您回到了玩乐高玩具和类似玩具的时代。 :)此时,您应该准备好进行下一步,并尝试同时控制多个伺服器。 这将是我关于该项目的下一篇文章的重点。
本文中使用的图片均来自以下网站: thepihut.com , 4tronix.co.uk和hackaday.com 。 随时检查他们。
翻译自: https://www.javacodegeeks.com/2015/06/build-your-own-robot-arm-assembly.html
机器人组装















 2025
2025

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









