







- 原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning
- 私信和评论没法及时回,有问题欢迎微信交流:lizhengxiao99
一、GNSS观测量及其误差
1、时间、伪距
-
伪距 ρ ( t ) \rho \left ( t \right ) ρ(t)的定义:信号接收时间 t u ( t ) t_u\left ( t \right ) tu(t)与信号的发送时间 t ( S ) ( t − τ ) t^{(S)}\left ( t-\tau \right ) t(S)(t−τ)的差乘以光在真空中的速度c,即:
ρ ( t ) = c ( t u ( t ) − t ( S ) ( t − τ ) ) \rho \left ( t \right ) =c( t_u\left ( t \right ) - t^{(S)}\left ( t-\tau \right ) ) ρ(t)=c(tu(t)−t(S)(t−τ))
表示接收机天线到卫星天线的距离,包含了接收机钟差、卫星钟差和其它偏差(如:大气延迟atmospheric delays)的影响,所以称之为“伪距”,伪距观测方程:
ρ = r + c ( δ t u − δ t s ) + c I + c T + ε ρ \rho =r+c\left ( \delta t_u-\delta t^{s} \right ) +cI+cT+\varepsilon _\rho ρ=r+c(δtu−δts)+cI+cT+ερ
其中 r r r 表示接收机卫星间的几何距离, δ t u \delta t_u δtu 表示接收机钟差, δ t s \delta t^{s} δts 表示卫星钟差, I I I 表示电离层延迟, T T T 表示对流层延迟, ε ρ \varepsilon _\rho ερ 表示伪距测量噪声。 δ t s \delta t^{s} δts、 I I I 、 T T T 都可通过模型消除,视为已知量,因此我们定义校正后的伪距测量值 ρ c \rho_c ρc :
ρ c = ρ + δ t ( s ) − I − T \rho _c=\rho +\delta t^{(s)}-I-T ρc=ρ+δt(s)−I−T -
信号发送时间 t ( s ) t^{(s)} t(s)的获取:
-
接收机直接测量的不是信号的发射时间 t ( s ) t^{(s)} t(s)是码相位(CP),信号发送时间 t ( s ) t^{(s)} t(s)和伪距 ρ \rho ρ是在码相位测量值的基础上组装起来的。
-
码相位通过接收机内部码跟踪环路上的C/A码发生器和C/A码相关器获得的,码相位反应最新接收到C/A码在一整个周期C/A码中的位置,其值在0—1023间,且通常不是一个整数。
-
只有当接收机接收到卫星信号并进入子帧同步状态后,才能将 t ( s ) t^{(s)} t(s) 构筑出来,构筑公式:
t ( s ) = T O W + ( 30 w + b ) × 0.020 + ( c + C P 1023 ) × 0.001 t^{(s)}=TOW +\left ( 30w+b \right )\times 0.020+\left ( c+\frac{CP}{1023} \right ) \times 0.001 t(s)=TOW+(30w+b)×0.020+(c+1023CP)×0.001
其中TOW是周内秒子帧起始时间,每个字30比特,w个字,b个比特,每个比特0.02s,c个周期,CP码相位,C/A码周期0.001s。
-
2、载波相位测量值、多普勒频移、积分多普勒
-
载体相位差是实际上是对卫星信号的接收载波和接收机产生的参考频率之间的差频的测量。若能测得信号传播过程中两点的载波相位差,就可推断出两点的距离。在接收机采样时刻 t u t_u tu ,接收机内部复制的载波相位为 ϕ u \phi_u ϕu,接收机接收到的卫星载波信号相位为 ϕ ( s ) \phi^{(s)} ϕ(s),则载波相位测量值:
ϕ = ϕ u − ϕ ( s ) \phi=\phi_u-\phi^{(s)} ϕ=ϕu−ϕ(s)
以周为单位,一周360度,距离上对应一个载波波长。乘以波长就转化为距离
ϕ = λ − 1 r + N \phi=\lambda^{-1}r+N ϕ=λ−1r+N
其中, r r r为卫星到接收机的几何距离, N N N为整周模糊度。如果能确定 N N N的值,就可反推出几何距离 r r r。考虑到误差可将载波相位观测方程式写为:
ϕ = λ − 1 ( r + δ t u + δ t ( s ) − I + T ) + N + ε ϕ \phi=\lambda^{-1}(r+\delta t_u+\delta t^(s)-I+T)+N+\varepsilon_\phi ϕ=λ−1(r+δtu+δt(s)−I+T)+N+εϕ -
多普勒频移:一个静止不动的信号发射频率为 f f f的信号,而接收机以速度 v v v运行,那接收机收到的信号频率 f r f_r fr不是信号发设频率频率 f f f,而是 f + f d f+f_d f+fd,我们将这种信号接收频率随发射源和接收机间相对运动而变化的现象称为多普勒频移,将 f d f_d fd称为多普勒频移。这样多普勒频移 f d f_d fd等于信号接收频率与信号发送频率的差,即:
f d = f r − f f_d=f_r-f fd=fr−f
从电磁波传播的基本理论出发,我们可以严格推导出以下多普勒频移值的计算公式:
f d = v λ cos β = v c f cos β f_d=\frac{v}{\lambda } \cos \beta =\frac{v}{c}f\cos \beta fd=λvcosβ=cvfcosβ
其中, λ \lambda λ是信号发送频率对应的波长, c c c为光速, β \beta β为入射角。推广到移动型信号发射源:
f d = ( v − v ( s ) ) I ( s ) λ = − ( v ( s ) − v ) I ( s ) λ = − r ˙ λ f_d=\frac{(v-v^{(s)})I^{(s)}}{\lambda } =-\frac{(v^{(s)}-v)I^{(s)}}{\lambda }=\frac{-\dot{r} }{\lambda } fd=λ(v−v(s))I(s)=−λ(v(s)−v)I(s)=λ−r˙
对于静态信号发射源, β \beta β指接收机运动方向到信号入射方向的夹角。接收机朝信号方向运动时, β \beta β小于 9 0 ∘ 90^\circ 90∘ , f d f_d fd大于0,相同的时间里接受到的载波周数更多。由此我们可以总结:多普勒频移反应信号发射源与接收机之间连线距离的变化快慢,与接收机运行速度在连线方向上的投影成正比。 -
为测量接收到的卫星信号的载波相位,接收机内部复制的不是频率始终为 f f f的载波,而是通过内部的跟踪环路尽可能复制每时每刻的载波,并让复制出的载波相位与接收到卫星信号的载波一致。根据锁定的频率、相位的不同,载波跟踪环路存在频率锁定环路(FLL)和相位锁定环路(PLL)两种形式;FLL直接输出多普勒频移测量值,而PLL输出的是积分多普勒测量值。
-
积分多普勒: d ϕ d\phi dϕ是多普勒频移 f d f_d fd对时间的积分,即:
d ϕ k = d ϕ ( t k ) = − ∫ t 0 t k f d ( t ) d t d\phi _k=d\phi (t_k)=-\int_{t_0}^{t_k}f_d(t)dt dϕk=dϕ(tk)=−∫t0tkfd(t)dt
其中, d ϕ k d\phi _k dϕk代表接收机在历元 k k k时输出的积分多普勒测量值。在载波跟踪环路刚锁定或重锁定载波信号的一刻,接收机一般将积分多普勒值重置为0,也就是说- k k k时刻的积分多普勒值等于0~k时间的载波相位测量值的变化量。
- 积分多普勒 d ϕ k d\phi _k dϕk乘以波长 λ \lambda λ 后的值等于这段时间内卫星与接收机间的距离变化量,所以积分多普勒也称为积分距离差(ADR)。
- 由式也可以看出:积分多普勒 d ϕ k d\phi _k dϕk对时间的导数等于多普勒频移 f d f_d fd乘以-1。
-
积分多普勒与多普勒频移的区别:
-
多普勒频移值是一个瞬时值,体现用户接收机在测量时刻相对于卫星的瞬时运动速度。
-
积分多普勒是一个平均值,两时刻间的积分多普勒反应的是这也是断用户相对于卫星的总位移,运动位移反应的是平均速度。
-
二、Rinex文件概述
-
卫星导航定位都是通过对卫星观测以获得卫星所需的观测量来实现的,卫星发射的信号由载波、测距码、导航电文三部分组成,接收机通过接收处理卫星信号生成定位所需的观测量。
-
RINEX 是 Receiver Independent Exchange Format 的缩写。采用文本文件ASCII码存储数据。数据记录格式与接收机的制造厂商和具体型号无关,这样可以方便数据的传递,使数据尽可能多被使用 。
-
Rinex文件分三种:观测数据文件(Observation Data File)、导航信息文件(Navigation Message File)、气象数据文件(Meteorological Data File),本文主要介绍OBS和NAV文件的读取。
-
文件结构都以节、记录、字段和列为单位逐级组织。都由文件头和数据记录两节组成,每一节含若干记录,每条记录通常为一行,字段在行中所处的位置固定,不能错位。
-
文件头:包含整个文件的全局信息,由一行行组成,每一行由文件头标签和数据组成。
1-60列为数据,60-80列为文件头标签,文件头标签是必须的,且只能是格式描述的那几种选择。
三、存信息的类型
1、开头的#define
#define NAVEXP "D" /* exponent letter in RINEX NAV */
#define NUMSYS 7 /* number of systems */
#define MAXRNXLEN (16*MAXOBSTYPE+4) /* max RINEX record length */
#define MAXPOSHEAD 1024 /* max head line position */
#define MINFREQ_GLO -7 /* min frequency number GLONASS */
#define MAXFREQ_GLO 13 /* max frequency number GLONASS */
#define NINCOBS 262144 /* incremental number of obs data */ //2的18次方
2、卫星和卫星系统的表示
-
7位二进制码表示,对应位写1表示有对应的系统,做与运算可加系统。
static const int navsys[]={ /* satellite systems */ SYS_GPS,SYS_GLO,SYS_GAL,SYS_QZS,SYS_SBS,SYS_CMP,SYS_IRN,0 }; -
表示卫星系统的字母:G:GPS、R:GLONASS、E:GALILEO、C:BDS、J:QZSS,I:IRNSS、S:SBAS
-
相关函数:
-
satno():传入卫星系统(SYS_GPS,SYS_GLO,…) ,和PRN码,转换为连续的satellite number。
-
satsys():传入satellite number ,返回卫星系统(SYS_GPS,SYS_GLO,…) ,通过传入的指针prn传出PRN值。
-
satid2no():传入卫星ID,返回satellite number。
-
satno2id():传入卫星系统,和PRN,返回卫星ID(Gxx,Cxx)。
-
sat2code():传入satellite number,返回卫星ID(Gxx,Cxx)。
-
code2sys():传入卫星系统缩写,返回系统二进制码SYS_XXX。
-
satexclude():检测某颗卫星在定位时是否需要将其排除。
-
set_sysmask():根据opt里“-SYS=”后的字串,设置卫星系统掩码。
-
3、观测值类型表示
-
C:伪距、D:多普勒、L:载波相位、S:载噪比
static const char obscodes[]="CLDS"; /* observation type codes */ -
sigind_t:表示每种卫星系统的载波类型和观测值类型 ,每种类型的系统其实对应的就是一个sigind_t结构体,也就是说只需要建立七个结构体就够了。
typedef struct { /* signal index type */ int n; /* number of index */ //n代表这个卫星系统总的观测值类型,对应的卫星系统标识符后面的数字 int idx[MAXOBSTYPE]; /* signal freq-index */ int pos[MAXOBSTYPE]; /* signal index in obs data (-1:no) */ uint8_t pri [MAXOBSTYPE]; /* signal priority (15-0) */ uint8_t type[MAXOBSTYPE]; /* type (0:C,1:L,2:D,3:S) */ uint8_t code[MAXOBSTYPE]; /* obs-code (CODE_L??) */ double shift[MAXOBSTYPE]; /* phase shift (cycle) */ } sigind_t; -
CODE_XXX:观测值类型定义,用一串连续的数字表示。
#define CODE_NONE 0 /* obs code: none or unknown */ #define CODE_L1C 1 /* obs code: L1C/A,G1C/A,E1C (GPS,GLO,GAL,QZS,SBS) */ #define CODE_L1P 2 /* obs code: L1P,G1P,B1P (GPS,GLO,BDS) */ ...... #define CODE_L4B 67 /* obs code: G1aL1OCd (GLO) */ #define CODE_L4X 68 /* obs code: G1al1OCd+p (GLO) */ #define MAXCODE 68 /* max number of obs code */ -
code2obs():传入obs code (CODE_???) ,返回code string (“1C”,“1P”,“1Y”,…)
-
obs2code():传入code string (“1C”,“1P”,“1Y”,…),返回obs code (CODE_???)
static char *obscodes[]={ /* observation code strings */ "" ,"1C","1P","1W","1Y", "1M","1N","1S","1L","1E", /* 0- 9 */ "1A","1B","1X","1Z","2C", "2D","2S","2L","2X","2P", /* 10-19 */ "2W","2Y","2M","2N","5I", "5Q","5X","7I","7Q","7X", /* 20-29 */ "6A","6B","6C","6X","6Z", "6S","6L","8L","8Q","8X", /* 30-39 */ "2I","2Q","6I","6Q","3I", "3Q","3X","1I","1Q","5A", /* 40-49 */ "5B","5C","9A","9B","9C", "9X","1D","5D","5P","5Z", /* 50-59 */ "6E","7D","7P","7Z","8D", "8P","4A","4B","4X","" /* 60-69 */ }; -
code2idx():传入obs code (CODE_???) 和卫星系统(SYS_???) ,返回载波频率的下标
frequency index (-1: error) 0 1 2 3 4 -------------------------------------- GPS L1 L2 L5 - - GLONASS G1 G2 G3 - - (G1=G1,G1a,G2=G2,G2a) Galileo E1 E5b E5a E6 E5ab QZSS L1 L2 L5 L6 - SBAS L1 - L5 - - BDS B1 B2 B2a B3 B2ab (B1=B1I,B1C,B2=B2I,B2b) NavIC L5 S - - - -
code2freq():传入obs code (CODE???))和卫星系统(SYS_???),以及GLONASS的信道,调用code2freq_GPS()、code2freq_GLO()、code2freq_GAL()、code2freq_QZS()、code2freq_SBS()、code2freq_BDS()、code2freq_IRN(),返回对应的载波频率(Hz)
-
sat2freq():传入satellite number和obs code ,返回对应的载波频率(Hz)
-
setcodepri()、getcodepri():设置和获取信号优先级。如果输入的观测数据在同一频率内包含多个信号,RTKLIB将按照以下默认优先级选择一个信号进行处理。
static char codepris[7][MAXFREQ][16]={ /* code priority for each freq-index */ /* 0 1 2 3 4 5 */ {"CPYWMNSL","PYWCMNDLSX","IQX" ,"" ,"" ,"" ,""}, /* GPS */ {"CPABX" ,"PCABX" ,"IQX" ,"" ,"" ,"" ,""}, /* GLO */ {"CABXZ" ,"IQX" ,"IQX" ,"ABCXZ" ,"IQX" ,"" ,""}, /* GAL */ {"CLSXZ" ,"LSX" ,"IQXDPZ" ,"LSXEZ" ,"" ,"" ,""}, /* QZS */ {"C" ,"IQX" ,"" ,"" ,"" ,"" ,""}, /* SBS */ {"IQXDPAN" ,"IQXDPZ" ,"DPX" ,"IQXA" ,"DPX" ,"" ,""}, /* BDS */ {"ABCX" ,"ABCX" ,"" ,"" ,"" ,"" ,""} /* IRN */ };
4、存Rinex文件信息的类型:
-
obsd_t:用来存储某个历元中的某个卫星的观测值
typedef struct { /* observation data record */ gtime_t time; /* receiver sampling time (GPST) */ uint8_t sat,rcv; /* satellite/receiver number */ uint16_t SNR[NFREQ+NEXOBS]; /* signal strength (0.001 dBHz) */ //信噪比 uint8_t LLI[NFREQ+NEXOBS]; /* loss of lock indicator */ //周跳 uint8_t code[NFREQ+NEXOBS]; /* code indicator (CODE_???) */ double L[NFREQ+NEXOBS]; /* observation data carrier-phase (cycle) */ double P[NFREQ+NEXOBS]; /* observation data pseudorange (m) */ float D[NFREQ+NEXOBS]; /* observation data doppler frequency (Hz) */ } obsd_t; -
obs_t :存一系列的obsd_t
typedef struct { /* observation data */ int n,nmax; /* number of obervation data/allocated */ obsd_t *data; /* observation data records */ } obs_t;data字段是obsd_t数组,n字段表示存着的obsd_t数目,nmax字段表示目前data内存空间最大能存的obsd_t数目addobsdata()函数执行向obs->data[]中添加OBS观测值数据的操作,先检验nmax值,不够就realloc()readobsnav()函数中读取完OBS数据后,会调用sortobs()根据time, rcv, sat ,对obs->data的元素进行排序、去重,得到历元数nepoch,调用uniqnav(),进行星历数据的排序去重。procpos()函数while大循环中,调用inputobs()每次取一个历元的观测数据用rtkpos()处理。
-
eph_t、geph_t、seph_t:存一个星历数据
-
nav_t:存全部的星历数据,历书数据、精密星历、TEC格网、广播星历电离层参数、DGPS、SSR改正信息
- nav_t存eph、geph、seph、peph、pclk、alm、erp的方式与obs_t存obs的方式类似
typedef struct { /* navigation data type */ int n,nmax; /* number of broadcast ephemeris */ int ng,ngmax; /* number of glonass ephemeris */ int ns,nsmax; /* number of sbas ephemeris */ int ne,nemax; /* number of precise ephemeris */ int nc,ncmax; /* number of precise clock */ int na,namax; /* number of almanac data */ int nt,ntmax; /* number of tec grid data */ eph_t *eph; /* GPS/QZS/GAL/BDS/IRN ephemeris */ geph_t *geph; /* GLONASS ephemeris */ seph_t *seph; /* SBAS ephemeris */ peph_t *peph; /* precise ephemeris */ pclk_t *pclk; /* precise clock */ alm_t *alm; /* almanac data */ tec_t *tec; /* tec grid data */ erp_t erp; /* earth rotation parameters */ double utc_gps[8]; /* GPS delta-UTC parameters {A0,A1,Tot,WNt,dt_LS,WN_LSF,DN,dt_LSF} */ double utc_glo[8]; /* GLONASS UTC time parameters {tau_C,tau_GPS} */ double utc_gal[8]; /* Galileo UTC parameters */ double utc_qzs[8]; /* QZS UTC parameters */ double utc_cmp[8]; /* BeiDou UTC parameters */ double utc_irn[9]; /* IRNSS UTC parameters {A0,A1,Tot,...,dt_LSF,A2} */ double utc_sbs[4]; /* SBAS UTC parameters */ double ion_gps[8]; /* GPS iono model parameters {a0,a1,a2,a3,b0,b1,b2,b3} */ double ion_gal[4]; /* Galileo iono model parameters {ai0,ai1,ai2,0} */ double ion_qzs[8]; /* QZSS iono model parameters {a0,a1,a2,a3,b0,b1,b2,b3} */ double ion_cmp[8]; /* BeiDou iono model parameters {a0,a1,a2,a3,b0,b1,b2,b3} */ double ion_irn[8]; /* IRNSS iono model parameters {a0,a1,a2,a3,b0,b1,b2,b3} */ int glo_fcn[32]; /* GLONASS FCN + 8 */ double cbias[MAXSAT][3]; /* satellite DCB (0:P1-P2,1:P1-C1,2:P2-C2) (m) */ double rbias[MAXRCV][2][3]; /* receiver DCB (0:P1-P2,1:P1-C1,2:P2-C2) (m) */ pcv_t pcvs[MAXSAT]; /* satellite antenna pcv */ sbssat_t sbssat; /* SBAS satellite corrections */ sbsion_t sbsion[MAXBAND+1]; /* SBAS ionosphere corrections */ dgps_t dgps[MAXSAT]; /* DGPS corrections */ ssr_t ssr[MAXSAT]; /* SSR corrections */ } nav_t;
-
addobsdata()、add_eph()、add_geph()、add_seph():四个函数类似,都是在对应数组里添加数据,检验内存够不够,不够就
realloc()- addobsdata():
obs->data[]中添加OBS观测值数据,obs->n表示OBS数量。 - add_eph():
nav->eph[]中添加eph星历数据,nav->n表示eph数量。 - add_geph():
nav->geph[]中添加GLONASS星历数据,nav->ng表示geph数量。 - add_seph():
nav->seph[]中添加SBAS星历数据,nav->ns表示seph数量。
static int addobsdata(obs_t *obs, const obsd_t *data) { obsd_t *obs_data; if (obs->nmax<=obs->n) { if (obs->nmax<=0) obs->nmax=NINCOBS; else obs->nmax*=2; //realloc是对之前malloc分配的内存进行重新分配,在设置的nmax值小于实际n值时执行 if (!(obs_data=(obsd_t *)realloc(obs->data,sizeof(obsd_t)*obs->nmax))) { trace(1,"addobsdata: malloc error n=%dx%d\n",sizeof(obsd_t),obs->nmax); free(obs->data); obs->data=NULL; obs->n=obs->nmax=0; return -1; } obs->data=obs_data; } obs->data[obs->n++]=*data; return 1; } - addobsdata():
四、rinex.c开头的辅助函数
1.setstr():去除结尾空格
传入字符串src,返回去除结尾空格的字符串dst。
static void setstr(char *dst, const char *src, int n)
{
char *p=dst; //目标字符串
const char *q=src; //源字符串
while (*q&&q<src+n) *p++=*q++; //循环把q的前n个字符赋值给p
*p--='\0';
while (p>=dst&&*p==' ') *p--='\0'; //从后往前循环,把从后往前最后一个空格赋值\0,遇到不是空格就跳出循环
}
2.adjweek():调整时间差到半周内
传入两个时间,算时间差,通过加减整周秒数,将时间差调整到半周内
static gtime_t adjweek(gtime_t t, gtime_t t0)
{
double tt=timediff(t,t0);
if (tt<-302400.0) return timeadd(t, 604800.0);
if (tt> 302400.0) return timeadd(t,-604800.0);
return t;
}
3.adjday():调整时间差到半天内
传入两个时间,算时间差,通过加减整天秒数,将时间差调整到半天内
static gtime_t adjday(gtime_t t, gtime_t t0)
{
double tt=timediff(t,t0);
if (tt<-43200.0) return timeadd(t, 86400.0);
if (tt> 43200.0) return timeadd(t,-86400.0);
return t;
}
4.timestr_rnx():获取系统UTC时间
字符串形式输出:(yyyymmdd hhmmss UTC)
static void timestr_rnx(char *str)
{
gtime_t time;
double ep[6];
time=timeget(); //获取系统UTC时间
time.sec=0.0;
time2epoch(time,ep); //将系统时间转为ep数组
sprintf(str,"%04.0f%02.0f%02.0f %02.0f%02.0f%02.0f UTC",ep[0],ep[1],ep[2],
ep[3],ep[4],ep[5]);
}
5.init_sta():初始化测站信息
将结构体sta_t中的字段都设为0
static void init_sta(sta_t *sta)
{
int i;
*sta->name ='\0';
*sta->marker ='\0';
*sta->antdes ='\0';
*sta->antsno ='\0';
*sta->rectype='\0';
*sta->recver ='\0';
*sta->recsno ='\0';
sta->antsetup=sta->itrf=sta->deltype=0;
for (i=0;i<3;i++) sta->pos[i]=0.0;
for (i=0;i<3;i++) sta->del[i]=0.0;
sta->hgt=0.0;
}
6.uravalue():用户距离精度URA到名义值
用于计算卫星位置的时候标定方差。
static const double ura_nominal[]={ /* URA nominal values */
2.0,2.8,4.0,5.7,8.0,11.3,16.0,32.0,64.0,128.0,256.0,512.0,1024.0,
2048.0,4096.0,8192.0
};
static double uravalue(int sva)
{
return 0<=sva&&sva<15?ura_nominal[sva]:8192.0;
}
7.uraindex():URA值到URA下标。
static const double ura_eph[]={ /* RAa values (ref [3] 20.3.3.3.1.1) */
2.4,3.4,4.85,6.85,9.65,13.65,24.0,48.0,96.0,192.0,384.0,768.0,1536.0,
3072.0,6144.0,0.0
};
static int uraindex(double value)
{
int i;
for (i=0;i<15;i++) if (ura_eph[i]>=value) break;
return i;
}
8.sisa_value():Galileo卫星系统完备性SISA下标到值。
static double sisa_value(int sisa)
{
if (sisa<= 49) return sisa*0.01;
if (sisa<= 74) return 0.5+(sisa- 50)*0.02;
if (sisa<= 99) return 1.0+(sisa- 75)*0.04;
if (sisa<=125) return 2.0+(sisa-100)*0.16;
return -1.0; /* unknown or NAPA */
}
9.sisa_index():Galileo卫星系统完备性SISA值到下标。
static int sisa_index(double value)
{
if (value<0.0 || value>6.0) return 255; /* unknown or NAPA */
else if (value<=0.5) return (int)(value/0.01);
else if (value<=1.0) return (int)((value-0.5)/0.02)+50;
else if (value<=2.0) return (int)((value-1.0)/0.04)+75;
return ((int)(value-2.0)/0.16)+100;
}
五、Rinex文件读取函数调用流程
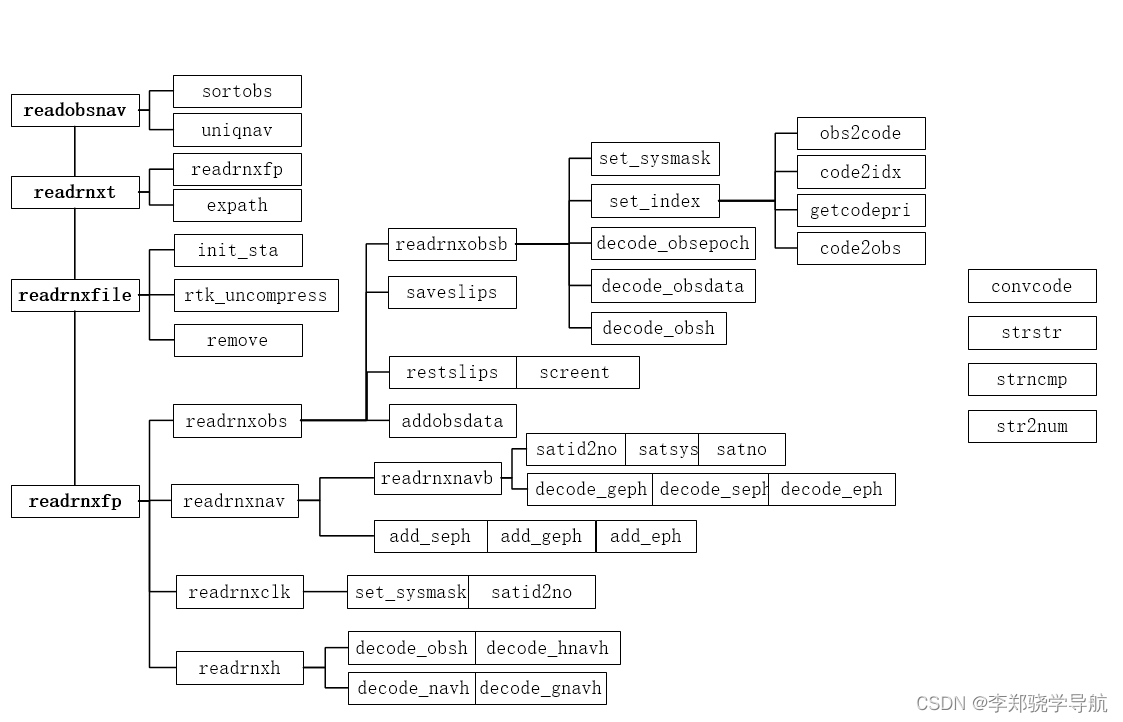
1、readobsnav():Rinex文件读取主入口函数
-
传入参数:
gtime_t ts 解算开始时间 gtime_t te 解算结束时间 double ti 解算时间间隔 char **infile 传入文件路径数组 const int *index 对应文件下标 int n infile[]元素个数 const prcopt_t *prcopt 处理选项 obs_t *obs 存观测数据OBS nav_t *nav 存导航电文数据NAV sta_t *sta 测站结构体,存obs文件头读取到的一部分的信息- index[]的作用:会传给
execses_b(),再传给execses_r(),再传给execses(),再传给readobsnav()。如果不需要根据tu分时间段解算,index存的就是0~n,如果需要分时间段解算,index存的是对应时间段内文件的下标。
- index[]的作用:会传给
-
执行流程:
- 初始化对所有数据指针,赋空
- 遍历
infile[],调用readrnxt()读取文件 ,rcv=1:流动站,2:基准站 - 如果下标和上一次循环的不同,记录当前
index[i]值到ind - 检测观测数据数
obs->n、星历数据数nav->n是否正常 - 调用
sortobs(),根据time, rcv, sat ,对obs->data的元素进行排序、去重,得到历元数nepoch - 调用
uniqnav(),进行星历数据的排序去重
static int readobsnav(gtime_t ts, gtime_t te, double ti, char **infile, const int *index, int n, const prcopt_t *prcopt, obs_t *obs, nav_t *nav, sta_t *sta) { int i,j, nd=0, ind=0 nobs=0, rcv=1; trace(3,"readobsnav: ts=%s n=%d\n",time_str(ts,0),n); //初始化对所有数据指针 obs->data=NULL; obs->n =obs->nmax =0; nav->eph =NULL; nav->n =nav->nmax =0; nav->geph=NULL; nav->ng=nav->ngmax=0; nav->seph=NULL; nav->ns=nav->nsmax=0; nepoch=0; //遍历infile[],调用readrnxt()读取文件 for (i=0;i<n;i++) { if (checkbrk("")) return 0; if (index[i]!=ind) { //如果下标和上一次循环的不同 if (obs->n>nobs) rcv++; //rcv=1:rover,2:reference ind=index[i]; //记录当前index[i]值到ind nobs=obs->n; // } /* read rinex obs and nav file */ //最后一个参数为地址sta_t *sta:如果rcv=0,传null;rcv不为0,根据rcv值,rcv=1就传sta的地址,rcv=1就传sta+1 if (readrnxt(infile[i],rcv,ts,te,ti,prcopt->rnxopt[rcv<=1?0:1],obs,nav, rcv<=2?sta+rcv-1:NULL)<0) { checkbrk("error : insufficient memory"); trace(1,"insufficient memory\n"); return 0; } } //检测观测数是否正常 if (obs->n<=0) { checkbrk("error : no obs data"); trace(1,"\n"); return 0; } //检测星历数是否正常 if (nav->n<=0&&nav->ng<=0&&nav->ns<=0) { checkbrk("error : no nav data"); trace(1,"\n"); return 0; } //调用sortobs(),根据time, rcv, sat ,对obs->data的元素进行排序、去重,得到历元数nepoch /* sort observation data */ nepoch=sortobs(obs); //调用uniqnav(),进行星历数据的排序去重。 /* delete duplicated ephemeris */ uniqnav(nav); /* set time span for progress display */ if (ts.time==0||te.time==0) { for (i=0; i<obs->n;i++) if (obs->data[i].rcv==1) break; for (j=obs->n-1;j>=0;j--) if (obs->data[j].rcv==1) break; if (i<j) { if (ts.time==0) ts=obs->data[i].time; if (te.time==0) te=obs->data[j].time; settspan(ts,te); } } return 1; } -
调用的函数:
-
sortobs():根据time, rcv, sat ,对
obs->data的元素进行排序、去重,返回历元数。static int cmpobs(const void *p1, const void *p2) { obsd_t *q1=(obsd_t *)p1,*q2=(obsd_t *)p2; double tt=timediff(q1->time,q2->time); //求时间差tt if (fabs(tt)>DTTOL) return tt<0?-1:1; //时间差tt绝对值大于DTTOL,q1早于q2返回1,不需要改变顺序 if (q1->rcv!=q2->rcv) return (int)q1->rcv-(int)q2->rcv; //rcv流动站号不同,返回差值 return (int)q1->sat-(int)q2->sat; //sat卫星号不同,返回卫星号的差值 } extern int sortobs(obs_t *obs) { int i,j,n; trace(3,"sortobs: nobs=%d\n",obs->n); if (obs->n<=0) return 0; //qsort:快速排序:qsort(*s, n, sizeof(s[0]), cmp); //参一:参与排序的首地址 //参二:需要排序的数量 //参三:每一个元素占用的空间大小 //参四:比较函数回调。返回值,<0(不进行置换),>0(进行置换),0(不进行置换) qsort(obs->data,obs->n,sizeof(obsd_t),cmpobs); //删除重复数据,删除时间、sat、rcv都相等的obs数据 /* delete duplicated data */ for (i=j=0;i<obs->n;i++) { if (obs->data[i].sat!=obs->data[j].sat|| obs->data[i].rcv!=obs->data[j].rcv|| timediff(obs->data[i].time,obs->data[j].time)!=0.0) { obs->data[++j]=obs->data[i]; } } obs->n=j+1; //统计去重后的观测值个数 //这个嵌套循环作用就是统计obs->data时间有多少种,即历元数n //i:外层循环,每次循环赋值为j,n++ //j:在i的基础上++,j的时间早于i的时间,跳出内层循环 //n:外层循环的次数,历元个数 for (i=n=0;i<obs->n;i=j,n++) { for (j=i+1;j<obs->n;j++) { if (timediff(obs->data[j].time,obs->data[i].time)>DTTOL) break; //j的时间早于i的时间,跳出内层循环 } } return n; } -
uniqnav():调用
uniqeph()、uniqgeph()、uniqseph()进行星历数据的排序去重。uniqeph():根据
ttr、toe对nav->eph中的元素排序,根据sat和iode去重,根据新的星历数据eph_t的数量,realloc重新分配内存空间。static int cmpeph(const void *p1, const void *p2) { eph_t *q1=(eph_t *)p1,*q2=(eph_t *)p2; return q1->ttr.time!=q2->ttr.time?(int)(q1->ttr.time-q2->ttr.time): (q1->toe.time!=q2->toe.time?(int)(q1->toe.time-q2->toe.time): q1->sat-q2->sat); } static void uniqeph(nav_t *nav) { eph_t *nav_eph; int i,j; trace(3,"uniqeph: n=%d\n",nav->n); if (nav->n<=0) return; qsort(nav->eph,nav->n,sizeof(eph_t),cmpeph); for (i=1,j=0;i<nav->n;i++) { //去除nav->eph中sat和iode相同的元素 if (nav->eph[i].sat!=nav->eph[j].sat|| nav->eph[i].iode!=nav->eph[j].iode) { nav->eph[++j]=nav->eph[i]; } } nav->n=j+1; //按新的星历数据eph_t的数量,realloc内存空间 if (!(nav_eph=(eph_t *)realloc(nav->eph,sizeof(eph_t)*nav->n))) { trace(1,"uniqeph malloc error n=%d\n",nav->n); free(nav->eph); nav->eph=NULL; nav->n=nav->nmax=0; return; } nav->eph=nav_eph; nav->nmax=nav->n; trace(4,"uniqeph: n=%d\n",nav->n); }
-
2、readrnxt():处理文件路径、赋值测站名
- 如果传入
file为空,调用readrnxfp()从标准输入读取 - 展开
file路径中的通配符*到files[] - 调用
readrnxfile,循环解压读取files[] - 如果测站名字为空,就给依据头文件自动赋4个字符的名字
extern int readrnxt(const char *file, int rcv, gtime_t ts, gtime_t te,
double tint, const char *opt, obs_t *obs, nav_t *nav,
sta_t *sta)
{
int i,n,stat=0;
const char *p;
char type=' ',*files[MAXEXFILE]={0};
trace(3,"readrnxt: file=%s rcv=%d\n",file,rcv);
if (!*file) { //如果传入file为空,调用readrnxfp()从标准输入读取?
return readrnxfp(stdin,ts,te,tint,opt,0,1,&type,obs,nav,sta);
}
for (i=0;i<MAXEXFILE;i++) { //为files[]开辟空间
if (!(files[i]=(char *)malloc(1024))) {
for (i--;i>=0;i--) free(files[i]);
return -1;
}
}
/* expand wild-card */ //展开file路径中的通配符*到files[]
if ((n=expath(file,files,MAXEXFILE))<=0) {
for (i=0;i<MAXEXFILE;i++) free(files[i]);
return 0;
}
/* read rinex files */ //调用readrnxfile,循环解压读取files[]
for (i=0;i<n&&stat>=0;i++) {
stat=readrnxfile(files[i],ts,te,tint,opt,0,rcv,&type,obs,nav,sta);
}
/* if station name empty, set 4-char name from file head */ //如果测站名字为空,就给依据头文件自动赋4个字符的名字
if (type=='O'&&sta) {
if (!(p=strrchr(file,FILEPATHSEP))) p=file-1;
if (!*sta->name) setstr(sta->name,p+1,4);
}
for (i=0;i<MAXEXFILE;i++) free(files[i]);
return stat;
}
3、readrnxfile():解压、打开文件
- 调用
rtk_uncompress()解压文件file到tmpfile,如果不需要解压cstat值会为0,后面fopen会根据cstat的值决定要读取的文件 - 以读的方式打开解压后的文件
- 调用
readrnxfp(),从文件描述符fp中读取文件 - 删除
tmpfile
static int readrnxfile(const char *file, gtime_t ts, gtime_t te, double tint,
const char *opt, int flag, int index, char *type,
obs_t *obs, nav_t *nav, sta_t *sta)
{
FILE *fp;
int cstat,stat;
char tmpfile[1024];
trace(3,"readrnxfile: file=%s flag=%d index=%d\n",file,flag,index);
if (sta) init_sta(sta);
/* uncompress file */ //解压文件file到tmpfile
if ((cstat=rtk_uncompress(file,tmpfile))<0) {
trace(2,"rinex file uncompact error: %s\n",file);
return 0;
}
//以读的方式打开解压后的文件
if (!(fp=fopen(cstat?tmpfile:file,"r"))) {
trace(2,"rinex file open error: %s\n",cstat?tmpfile:file);
return 0;
}
//调用readrnxfp,从文件描述符fp中读取文件
/* read RINEX file */
stat=readrnxfp(fp,ts,te,tint,opt,flag,index,type,obs,nav,sta);
fclose(fp);
/* delete temporary file */ //删除tmpfile
if (cstat) remove(tmpfile);
return stat;
}
4、readrnxfp():根据文件类型调用对应的读取函数
- 调用
readrnxh()读取头文件。并获取文件类型type - 根据type调用对应的函数进行分类读取,
readrnxobs()读OBS文件,readrnxnav()读NAV文件,调用readrnxnav()读clock文件。
static int readrnxfp(FILE *fp, gtime_t ts, gtime_t te, double tint,
const char *opt, int flag, int index, char *type,
obs_t *obs, nav_t *nav, sta_t *sta)
{
double ver;
int sys,tsys=TSYS_GPS;
char tobs[NUMSYS][MAXOBSTYPE][4]={{""}};
trace(3,"readrnxfp: flag=%d index=%d\n",flag,index);
/* read RINEX file header */ //读取rinex头文件
if (!readrnxh(fp,&ver,type,&sys,&tsys,tobs,nav,sta)) return 0;
//type:通过readrnxh()读取文件头第一行获得
/* flag=0:except for clock,1:clock */
if ((!flag&&*type=='C')||(flag&&*type!='C')) return 0;
/* read RINEX file body */ //读取观测文件体
switch (*type) { //通过判断头文件识别的type进行分类读取
case 'O': return readrnxobs(fp,ts,te,tint,opt,index,ver,&tsys,tobs,obs,
sta);
case 'N': return readrnxnav(fp,opt,ver,sys ,nav);
case 'G': return readrnxnav(fp,opt,ver,SYS_GLO,nav);
case 'H': return readrnxnav(fp,opt,ver,SYS_SBS,nav);
case 'J': return readrnxnav(fp,opt,ver,SYS_QZS,nav); /* extension */
case 'L': return readrnxnav(fp,opt,ver,SYS_GAL,nav); /* extension */
case 'C': return readrnxclk(fp,opt,index,nav);
}
trace(2,"unsupported rinex type ver=%.2f type=%c\n",ver,*type);
return 0;
}
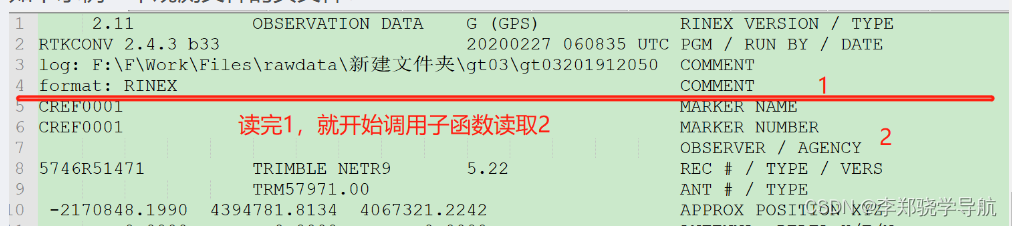
5、readrnxh():读取文件头
-
函数的主体在一个while大循环中,循环读取每一行,直到出现"END OF HEADER"
-
首先进行第一行版本号读取,记录版本号以及观测文件类型。
-
PGM / RUN BY / DATE" 、END OF HEADER 直接跳过不读取。
-
通过判断文件类型分配不同函数读取文件头,decode_obsh()、decode_navh()、decode_gnavh()、decode_hnavh()、decode_navh() ,
static int readrnxh(FILE *fp, double *ver, char *type, int *sys, int *tsys,
char tobs[][MAXOBSTYPE][4], nav_t *nav, sta_t *sta)
{
char buff[MAXRNXLEN],*label=buff+60;
int i=0;
trace(3,"readrnxh:\n");
*ver=2.10; *type=' '; *sys=SYS_GPS;
while (fgets(buff,MAXRNXLEN,fp)) {
//判定观测文件头部分所有字符总长度是否正常
if (strlen(buff)<=60) {
continue;
}
//首先进行第一行版本号读取,记录版本号以及观测文件类型
else if (strstr(label,"RINEX VERSION / TYPE")) {
*ver=str2num(buff,0,9);
*type=*(buff+20);
//通过定位字符位置读取字符,判断系统类型并记录
/* satellite system */
switch (*(buff+40)) {
case ' ':
case 'G': *sys=SYS_GPS; *tsys=TSYS_GPS; break;
case 'R': *sys=SYS_GLO; *tsys=TSYS_UTC; break;
case 'E': *sys=SYS_GAL; *tsys=TSYS_GAL; break; /* v.2.12 */
case 'S': *sys=SYS_SBS; *tsys=TSYS_GPS; break;
case 'J': *sys=SYS_QZS; *tsys=TSYS_QZS; break; /* v.3.02 */
case 'C': *sys=SYS_CMP; *tsys=TSYS_CMP; break; /* v.2.12 */
case 'I': *sys=SYS_IRN; *tsys=TSYS_IRN; break; /* v.3.03 */
case 'M': *sys=SYS_NONE; *tsys=TSYS_GPS; break; /* mixed */
default :
trace(2,"not supported satellite system: %c\n",*(buff+40));
break;
}
continue;
}
else if (strstr(label,"PGM / RUN BY / DATE")) {
continue;
}
else if (strstr(label,"COMMENT")) {
continue;
}
//通过判断文件类型分配不同函数读取文件头
switch (*type) { /* file type */
case 'O': decode_obsh(fp,buff,*ver,tsys,tobs,nav,sta); break;
case 'N': decode_navh (buff,nav); break;
case 'G': decode_gnavh(buff,nav); break;
case 'H': decode_hnavh(buff,nav); break;
case 'J': decode_navh (buff,nav); break; /* extension */
case 'L': decode_navh (buff,nav); break; /* extension */
}
if (strstr(label,"END OF HEADER")) return 1;
if (++i>=MAXPOSHEAD&&*type==' ') break; /* no RINEX file */
}
return 0;
}
六、OBS观测文件读取
decode_obsh()、readrnxobs()->readrnxobsb()->decode_obsepoch()、decode_obsdata()
1、decode_obsh():解析观测数据文件头
最关键的是解析观测值类型如下图,存到tobs三维数组中,【星座类型】【观测类型】【字符串数4】
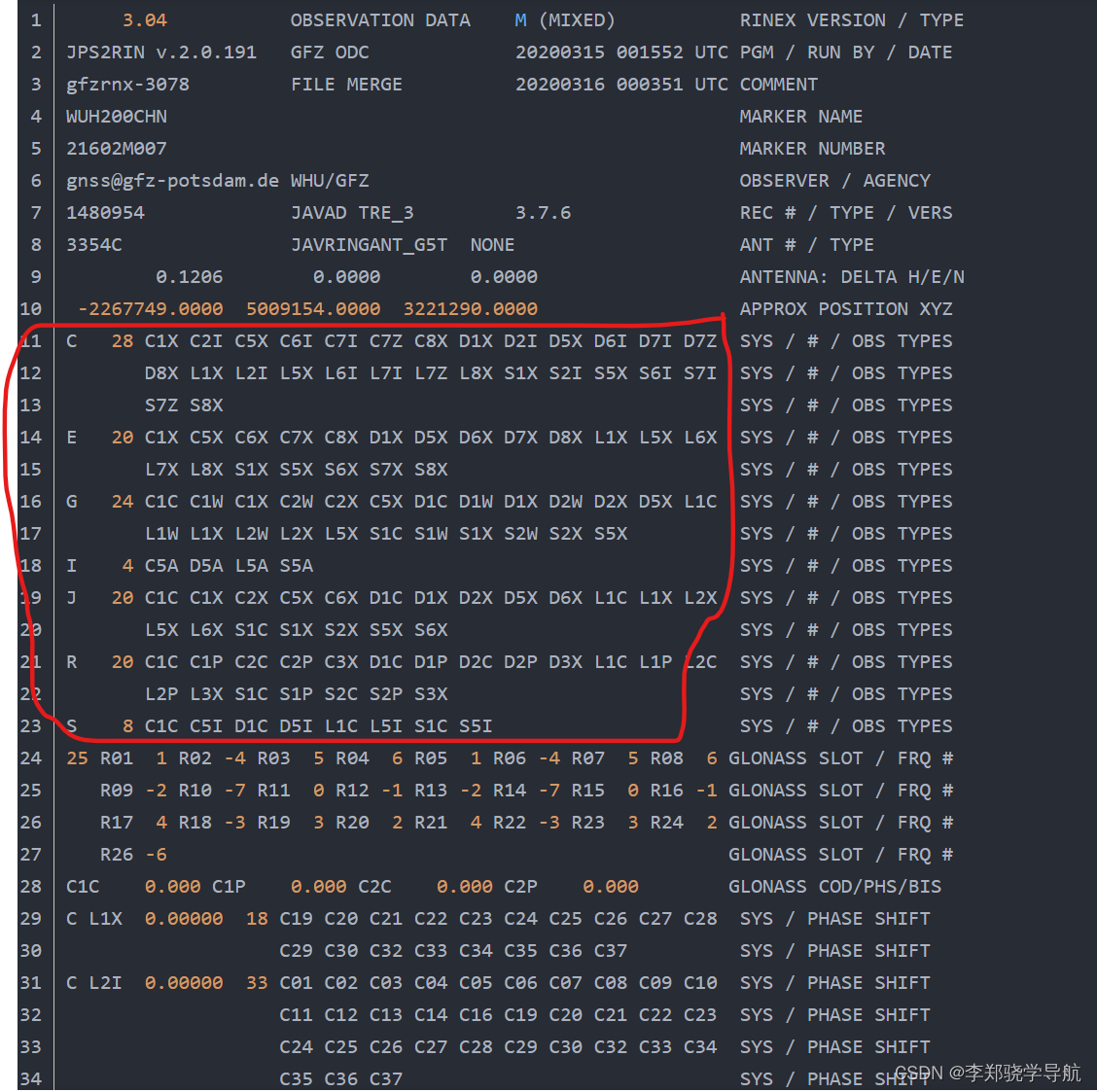
核心代码:先读取开头的卫星系统
i,再读该卫星系统的观测值类型数n,之后循环读取n个观测值类型存到tobs[i][nt++]中,一行读完观测值类型数不到n就再fgets()读下一行else if (strstr(label,"SYS / # / OBS TYPES" )) { /* ver.3 */ //如果卫星系统不在static const char syscodes[]="GREJSCI"; 中输出错误消息 if (!(p=strchr(syscodes,buff[0]))) { trace(2,"invalid system code: sys=%c\n",buff[0]); return; } i=(int)(p-syscodes); //i为系统在syscodes[]="GREJSCI"的下标 n=(int)str2num(buff,3,3); //一个系统下的观测值类型数量 for (j=nt=0,k=7;j<n;j++,k+=4) { //读取具体观测值类型,每行第7位开始,每次读4位 if (k>58) { //读完一行 if (!fgets(buff,MAXRNXLEN,fp)) break; //再读取一行 k=7; } if (nt<MAXOBSTYPE-1) setstr(tobs[i][nt++],buff+k,3); } *tobs[i][nt]='\0'; //存储观测类型,分星座类型用三维数组进行存储【星座类型】【观测类型】【字符串数4】
static void decode_obsh(FILE *fp, char *buff, double ver, int *tsys,
char tobs[][MAXOBSTYPE][4], nav_t *nav, sta_t *sta)
{
/* default codes for unknown code */
const char frqcodes[]="1256789"; //定义频率数组
const char *defcodes[]={ //定义一个指针数组,不知道的编码直接采取默认字符串加空格的形式存储
"CWX ", /* GPS: L125____ */
"CCXX X ", /* GLO: L1234_6_ */
"C XXXX ", /* GAL: L1_5678_ */
"CXXX ", /* QZS: L1256___ */
"C X ", /* SBS: L1_5____ */
"XIXIIX ", /* BDS: L125678_ */
" A A" /* IRN: L__5___9 */
};
double del[3];
int i,j,k,n,nt,prn,fcn;
const char *p;
char *label=buff+60, //读文件头标签,从60开始
str[4];
trace(4,"decode_obsh: ver=%.2f\n",ver);
if (strstr(label,"MARKER NAME" )) {
if (sta) setstr(sta->name,buff,60); //测站名,存到测站结构体sta_t
}
else if (strstr(label,"MARKER NUMBER" )) { /* opt */
if (sta) setstr(sta->marker,buff,20);
}
else if (strstr(label,"MARKER TYPE" )) ; /* ver.3 */
else if (strstr(label,"OBSERVER / AGENCY" )) ; //有很多else if后不做处理,空语句
else if (strstr(label,"REC # / TYPE / VERS" )) {
if (sta) { //在文件中各个信息占20个字符,因此每20赋值一次
setstr(sta->recsno, buff, 20);
setstr(sta->rectype,buff+20,20);
setstr(sta->recver, buff+40,20);
}
}
else if (strstr(label,"ANT # / TYPE" )) {
if (sta) {
setstr(sta->antsno,buff ,20);
setstr(sta->antdes,buff+20,20);
}
}
else if (strstr(label,"APPROX POSITION XYZ" )) {
if (sta) { //这里的循环语句与上面类同,每14字符赋值一次
for (i=0,j=0;i<3;i++,j+=14) sta->pos[i]=str2num(buff,j,14);
}
}
else if (strstr(label,"ANTENNA: DELTA H/E/N")) { //记录天线各方向延迟
if (sta) {
for (i=0,j=0;i<3;i++,j+=14) del[i]=str2num(buff,j,14);
sta->del[2]=del[0]; /* h */
sta->del[0]=del[1]; /* e */
sta->del[1]=del[2]; /* n */
}
}
else if (strstr(label,"ANTENNA: DELTA X/Y/Z")) ; /* opt ver.3 */
else if (strstr(label,"ANTENNA: PHASECENTER")) ; /* opt ver.3 */
else if (strstr(label,"ANTENNA: B.SIGHT XYZ")) ; /* opt ver.3 */
else if (strstr(label,"ANTENNA: ZERODIR AZI")) ; /* opt ver.3 */
else if (strstr(label,"ANTENNA: ZERODIR XYZ")) ; /* opt ver.3 */
else if (strstr(label,"CENTER OF MASS: XYZ" )) ; /* opt ver.3 */
//观测数据类型读取
else if (strstr(label,"SYS / # / OBS TYPES" )) { /* ver.3 */
//如果卫星系统不在static const char syscodes[]="GREJSCI"; 中输出错误消息
if (!(p=strchr(syscodes,buff[0]))) {
trace(2,"invalid system code: sys=%c\n",buff[0]);
return;
}
i=(int)(p-syscodes); //i为系统在syscodes[]="GREJSCI"的下标
n=(int)str2num(buff,3,3); //一个系统下的观测值类型数量
for (j=nt=0,k=7;j<n;j++,k+=4) { //读取具体观测值类型,每行第7位开始,每次读4位
if (k>58) { //读完一行
if (!fgets(buff,MAXRNXLEN,fp)) break; //再读取一行
k=7;
}
if (nt<MAXOBSTYPE-1) setstr(tobs[i][nt++],buff+k,3);
}
*tobs[i][nt]='\0'; //存储观测类型,分星座类型用三维数组进行存储【星座类型】【观测类型】【字符串数4】
//北斗数据类型转换
/* change BDS B1 code: 3.02 */
if (i==5&&fabs(ver-3.02)<1e-3) {
for (j=0;j<nt;j++) if (tobs[i][j][1]=='1') tobs[i][j][1]='2';
}
/* if unknown code in ver.3, set default code */
for (j=0;j<nt;j++) {
if (tobs[i][j][2]) continue;
if (!(p=strchr(frqcodes,tobs[i][j][1]))) continue;
tobs[i][j][2]=defcodes[i][(int)(p-frqcodes)];
trace(2,"set default for unknown code: sys=%c code=%s\n",buff[0],
tobs[i][j]); //如果没有该观测类型,就进行错误提示
}
}
else if (strstr(label,"WAVELENGTH FACT L1/2")) ; /* opt ver.2 */
//rinex2版本的观测类型存储
else if (strstr(label,"# / TYPES OF OBSERV" )) { /* ver.2 */
n=(int)str2num(buff,0,6);
for (i=nt=0,j=10;i<n;i++,j+=6) {
if (j>58) {
if (!fgets(buff,MAXRNXLEN,fp)) break;
j=10;
}
if (nt>=MAXOBSTYPE-1) continue;
//将rnx3以下的版本的观测类型符号转化为rnx3的观测类型符号
if (ver<=2.99) {
setstr(str,buff+j,2);
convcode(ver,SYS_GPS,str,tobs[0][nt]);
convcode(ver,SYS_GLO,str,tobs[1][nt]);
convcode(ver,SYS_GAL,str,tobs[2][nt]);
convcode(ver,SYS_QZS,str,tobs[3][nt]);
convcode(ver,SYS_SBS,str,tobs[4][nt]);
convcode(ver,SYS_CMP,str,tobs[5][nt]);
}
nt++;
}
*tobs[0][nt]='\0';
}
else if (strstr(label,"SIGNAL STRENGTH UNIT")) ; /* opt ver.3 */
else if (strstr(label,"INTERVAL" )) ; /* opt */
//根据历元开始时间第49-51列判断星座类型
else if (strstr(label,"TIME OF FIRST OBS" )) {
if (!strncmp(buff+48,"GPS",3)) *tsys=TSYS_GPS;
else if (!strncmp(buff+48,"GLO",3)) *tsys=TSYS_UTC;
else if (!strncmp(buff+48,"GAL",3)) *tsys=TSYS_GAL;
else if (!strncmp(buff+48,"QZS",3)) *tsys=TSYS_QZS; /* ver.3.02 */
else if (!strncmp(buff+48,"BDT",3)) *tsys=TSYS_CMP; /* ver.3.02 */
else if (!strncmp(buff+48,"IRN",3)) *tsys=TSYS_IRN; /* ver.3.03 */
}
else if (strstr(label,"TIME OF LAST OBS" )) ; /* opt */
else if (strstr(label,"RCV CLOCK OFFS APPL" )) ; /* opt */
else if (strstr(label,"SYS / DCBS APPLIED" )) ; /* opt ver.3 */
else if (strstr(label,"SYS / PCVS APPLIED" )) ; /* opt ver.3 */
else if (strstr(label,"SYS / SCALE FACTOR" )) ; /* opt ver.3 */
else if (strstr(label,"SYS / PHASE SHIFTS" )) ; /* ver.3.01 */
else if (strstr(label,"GLONASS SLOT / FRQ #")) { /* ver.3.02 */
for (i=0;i<8;i++) {
if (buff[4+i*7]!='R') continue;
prn=(int)str2num(buff,5+i*7,2);
fcn=(int)str2num(buff,8+i*7,2);
if (prn<1||prn>MAXPRNGLO||fcn<-7||fcn>6) continue;
if (nav) nav->glo_fcn[prn-1]=fcn+8;
}
}
else if (strstr(label,"GLONASS COD/PHS/BIS" )) { /* ver.3.02 */
if (sta) {
sta->glo_cp_bias[0]=str2num(buff, 5,8);
sta->glo_cp_bias[1]=str2num(buff,18,8);
sta->glo_cp_bias[2]=str2num(buff,31,8);
sta->glo_cp_bias[3]=str2num(buff,44,8);
}
}
//记录跳秒,GLONASS观测文件中独有
else if (strstr(label,"LEAP SECONDS" )) { /* opt */
if (nav) {
nav->utc_gps[4]=str2num(buff, 0,6);
nav->utc_gps[7]=str2num(buff, 6,6);
nav->utc_gps[5]=str2num(buff,12,6);
nav->utc_gps[6]=str2num(buff,18,6);
}
}
else if (strstr(label,"# OF SALTELLITES" )) { /* opt */
/* skip */ ;
}
else if (strstr(label,"PRN / # OF OBS" )) { /* opt */
/* skip */ ;
}
}
2、readrnxobs():读取o文件中全部观测值数据
重复调用readrnxobsb()函数,直到所有的观测值全被读完,或者是出现了某个历元没有卫星的情况为止
-
传入参数:
FILE *fp I 传入的Rinex文件指针 gtime_t ts I 开始时间 gtime_t te I 结束时间 double tint I 时间间隔 const char *opt I 选项 int rcv I 接收机号 double ver I Rinex文件版本 int *tsys I 时间系统 char tobs[][MAXOBSTYPE][4] I 观测值类型数组 obs_t *obs O obsd_t类型的观测值数组 sta_t *sta O 卫星数组 -
执行流程:
- 为
data[]开辟空间 - while大循环调用
readrnxobsb()每次读取一个历元的观测数据,获取观测值数n - 遍历
data[],如果时间系统为UTC,转为GPST,调用saveslips() - 调用
screent(),判断传入的时间是否符合起始时间ts,结束时间te,时间间隔tint - 遍历
data[],调用restslips(),addobsdata()将data[]信息存到obs中
- 为
-
调用函数:
-
saveslips():
data->LLI[i]到slips[]static void saveslips(uint8_t slips[][NFREQ+NEXOBS], obsd_t *data) { int i; for (i=0;i<NFREQ+NEXOBS;i++) { if (data->LLI[i]&1) slips[data->sat-1][i]|=LLI_SLIP; } } -
restslips():
slips[]到data->LLI[i]static void restslips(uint8_t slips[][NFREQ+NEXOBS], obsd_t *data) { int i; for (i=0;i<NFREQ+NEXOBS;i++) { if (slips[data->sat-1][i]&1) data->LLI[i]|=LLI_SLIP; slips[data->sat-1][i]=0; } } -
screent():判断传入的时间time是否符合起始时间ts,结束时间te,时间间隔tint,符合返回1,不符合返回0
extern int screent(gtime_t time, gtime_t ts, gtime_t te, double tint) { return (tint<=0.0||fmod(time2gpst(time,NULL)+DTTOL,tint)<=DTTOL*2.0)&& //如果时间间隔不为0,time的TOW应该能整除tint (ts.time==0||timediff(time,ts)>=-DTTOL)&& //起始时间不为0,时间time要在ts之后 (te.time==0||timediff(time,te)< DTTOL); //结束时间不为0,时间time要在te之后 }
-
3、readrnxobsb():读取一个观测历元的观测数据
-
传入参数:
FILE *fp I I 传入的Rinex文件指针 const char *opt I 选项 double ver I Rinex文件版本 int *tsys I 时间系统 char tobs[][MAXOBSTYPE][4] I 观测值类型数组 int *flag I 历元信息状态 obsd_t *data O obsd_t类型的观测值数组 sta_t *sta O 卫星数组 -
执行流程:
- 调用
set_sysmask()获取卫星系统掩码mask,mask在之后decode_obsdata()中会用到,mask中没有的卫星系统不用。 - 调用set_index(),将将tobs数组中存的观测值类型信息存到sigind_t类型的index[]结构体数组中,此时传入的tobs数组是二维数组,每个传入的tobs都存了一个卫星系统的观测值类型,同理index[]的一个元素就存一个卫星系统的所有观测值类型。
- while大循环,fgets()存一行的数据
- 如果是第一行,则调用
decode_obsepoch()函数解码首行数据(包括历元时刻、卫星数、卫星编号、历元状态等信息),并将信息保存 ,获取的卫星数量nsat是判断循环次数的关键。 - 如果不是第一行则调用
decode_obsdata()函数对该行观测数据进行数据解码,读取一个历元内一颗卫星的观测值 ,到data[n] - 知道读取数量 i 等于
decode_obsepoch()获取的卫星数量nsat,结束循环,返回读取的观测值数(卫星数)
- 如果是第一行,则调用
static int readrnxobsb(FILE *fp, const char *opt, double ver, int *tsys, char tobs[][MAXOBSTYPE][4], int *flag, obsd_t *data, sta_t *sta) { gtime_t time={0}; sigind_t index[NUMSYS]={{0}}; char buff[MAXRNXLEN]; int i=0,n=0,nsat=0,nsys=NUMSYS,sats[MAXOBS]={0},mask; /* set system mask */ mask=set_sysmask(opt); //建立索引。将三维观测值类型数组退化成二维数组,建立一个索引数组 //通过判断nsys值对set_index进行传参,然后记录在sigind_t结构体中 /* set signal index */ if (nsys>=1) set_index(ver,SYS_GPS,opt,tobs[0],index ); if (nsys>=2) set_index(ver,SYS_GLO,opt,tobs[1],index+1); if (nsys>=3) set_index(ver,SYS_GAL,opt,tobs[2],index+2); if (nsys>=4) set_index(ver,SYS_QZS,opt,tobs[3],index+3); if (nsys>=5) set_index(ver,SYS_SBS,opt,tobs[4],index+4); if (nsys>=6) set_index(ver,SYS_CMP,opt,tobs[5],index+5); if (nsys>=7) set_index(ver,SYS_IRN,opt,tobs[6],index+6); /* read record */ while (fgets(buff,MAXRNXLEN,fp)) { //利用fgets()函数缓存一行数据 //记录一个观测历元的有效性、时间和卫星数 /* decode observation epoch */ //如果是第一行,则调用decode_obsepoch()函数解码首行数据(包括历元时刻、卫星数、卫星编号、历元状态等信息),并将信息保存 if (i==0) { if ((nsat=decode_obsepoch(fp,buff,ver,&time,flag,sats))<=0) { continue; } } //如果不是第一行则调用decode_obsdata()函数对该行观测数据进行数据解码 else if ((*flag<=2||*flag==6)&&n<MAXOBS) { data[n].time=time; data[n].sat=(uint8_t)sats[i-1]; //记录历元的数据部分 /* decode RINEX observation data */ if (decode_obsdata(fp,buff,ver,mask,index,data+n)) n++; } else if (*flag==3||*flag==4) { /* new site or header info follows */ //读取文件头,例如可以将不同系统的星历放在一个文件当中当作混合星历来使用 /* decode RINEX observation data file header */ decode_obsh(fp,buff,ver,tsys,tobs,NULL,sta); } if (++i>nsat) return n; } return -1; } - 调用
-
调用函数:
-
set_index():将
tobs数组中存的观测值类型信息存到sigind_t类型的ind结构体中static void set_index(double ver, int sys, const char *opt, char tobs[MAXOBSTYPE][4], sigind_t *ind) { const char *p; char str[8],*optstr=""; double shift; int i,j,k,n; //遍历tobs[] for (i=n=0;*tobs[i];i++,n++) { //code[i]存观测值类型CODE_XXX obs2code():传入code string ("1C","1P","1Y",...),返回obs code (CODE_???) ind->code[i]=obs2code(tobs[i]+1); //tobs[i]+1 就是“C1C "中的"1C "子串 ind->type[i]=(p=strchr(obscodes,tobs[i][0]))?(int)(p-obscodes):0; //判断观测值种类是否存在,存在则赋值ind->type ind->idx[i]=code2idx(sys,ind->code[i]); //获取载波载波频率的下标赋值ind->idx[i] ind->pri[i]=getcodepri(sys,ind->code[i],opt); ind->pos[i]=-1; } /* parse phase shift options */ switch (sys) { case SYS_GPS: optstr="-GL%2s=%lf"; break; case SYS_GLO: optstr="-RL%2s=%lf"; break; case SYS_GAL: optstr="-EL%2s=%lf"; break; case SYS_QZS: optstr="-JL%2s=%lf"; break; case SYS_SBS: optstr="-SL%2s=%lf"; break; case SYS_CMP: optstr="-CL%2s=%lf"; break; case SYS_IRN: optstr="-IL%2s=%lf"; break; } for (p=opt;p&&(p=strchr(p,'-'));p++) { if (sscanf(p,optstr,str,&shift)<2) continue; for (i=0;i<n;i++) { if (strcmp(code2obs(ind->code[i]),str)) continue; ind->shift[i]=shift; trace(2,"phase shift: sys=%2d tobs=%s shift=%.3f\n",sys, tobs[i],shift); } } /* assign index for highest priority code */ //为最高优先级观测值分配索引 for (i=0;i<NFREQ;i++) { for (j=0,k=-1;j<n;j++) { if (ind->idx[j]==i&&ind->pri[j]&&(k<0||ind->pri[j]>ind->pri[k])) { k=j; } } if (k<0) continue; for (j=0;j<n;j++) { if (ind->code[j]==ind->code[k]) ind->pos[j]=i; } } /* assign index of extended observation data */ //分配扩展观测数据的索引 for (i=0;i<NEXOBS;i++) { for (j=0;j<n;j++) { if (ind->code[j]&&ind->pri[j]&&ind->pos[j]<0) break; } if (j>=n) break; for (k=0;k<n;k++) { if (ind->code[k]==ind->code[j]) ind->pos[k]=NFREQ+i; } } for (i=0;i<n;i++) { if (!ind->code[i]||!ind->pri[i]||ind->pos[i]>=0) continue; trace(4,"reject obs type: sys=%2d, obs=%s\n",sys,tobs[i]); } ind->n=n; #if 0 /* for debug */ for (i=0;i<n;i++) { trace(2,"set_index: sys=%2d,tobs=%s code=%2d pri=%2d idx=%d pos=%d shift=%5.2f\n", sys,tobs[i],ind->code[i],ind->pri[i],ind->idx[i],ind->pos[i], ind->shift[i]); } #endif }
-
4、decode_obsepoch():解码历元首行数据
-
2、3版本观测值文件差异:
-
2版本:
- 每历元首行数据前26位为历元时间(yy mm dd hh mm ss),年是2位表示,str2time()函数中可以把年的前两位也补上。
- 29位epoch flag ,记录该历元状况,0表示正常,3:new site,4:header info,5:external event
- 30~32位为卫星数量
- 33~68:各个卫星的PRN号,观测到的卫星数>12时,一行的信息存储不下会自动换行,并且卫星的PRN号与前一行对其
- 历元信息往下一行就是记录观测值的数据块,以每颗卫星为单位,依照头文件中的观测值类型及顺序,从左到右依次排列,每行记录5个观测值,一行不够时转下行。当所有卫星数据记录完后,转到下一个历元。 观测值的顺序与文件头中**“SYS / # / OBS TYPES”**记录的观测类型顺序一致。
-
-
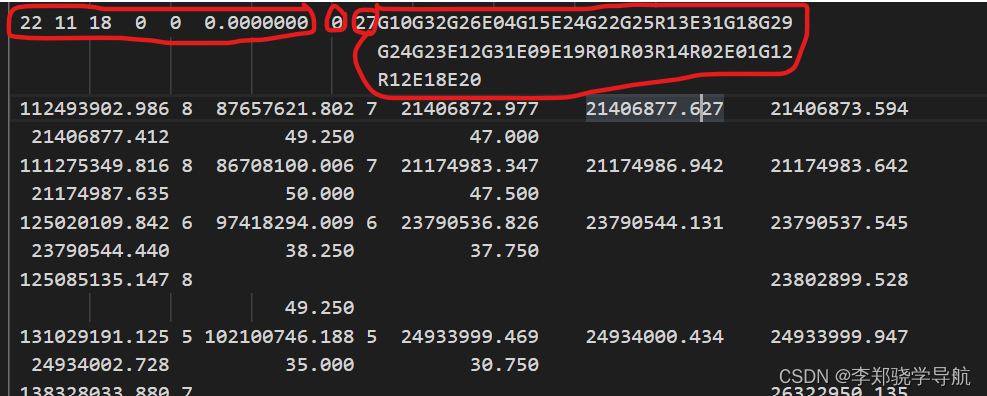
3版本:
- 每历元数据用用**>**开头
- 2~29位为历元时间(yyyy mm dd hh mm ss)
- 32位为epoch flag
- 后面是接收机钟差(s)
- 每组数据中的每一行表示一颗卫星的观测值,观测值的顺序与文件头中**“SYS / # / OBS TYPES”**记录的观测类型顺序一致
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-LWw24oXf-1681195207790)(C:\Users\李郑骁的spin5\Documents\Obsidian Vault\RTKLIB学习总结\RTKLIB学习总结(七)GNSS观测量、Rinex文件读取.assets\1681003699830.png)]](https://img-blog.csdnimg.cn/169ba09ebec94b3e99db4ca712afed94.png)
-
传入参数:
FILE *fp I 传入的Rinex文件指针 char *buff I fgets()读取到一行数据的首地址 double ver I Rinex文件版本 gtime_t *time O 历元时间 int *flag O epoh flag (o:ok,3:new site,4:header info,5:external event) int *sats O 历元卫星信息,2版本才有 -
执行流程:
- 2版本:
- 读取卫星数到
n - 读取
epoh flag到flag - 读取历元时间
time - 循环读取卫星ID(G10、G32、G26) ,读到68列,还没把卫星读完,就fgets()读取新的一行
- 将卫星ID转为
satellite number,存到sats[]数组中
- 读取卫星数到
- 3版本:
- 读取卫星数量
n - 读取
epoh flag到flag - 读取历元时间
time
- 读取卫星数量
static int decode_obsepoch(FILE *fp, char *buff, double ver, gtime_t *time, int *flag, int *sats) { int i,j,n; char satid[8]=""; trace(4,"decode_obsepoch: ver=%.2f\n",ver); if (ver<=2.99) { /* ver.2 */ if ((n=(int)str2num(buff,29,3))<=0) return 0; //读取卫星数到n /* epoch flag: 3:new site,4:header info,5:external event */ *flag=(int)str2num(buff,28,1); //读取epoh flag if (3<=*flag&&*flag<=5) return n; if (str2time(buff,0,26,time)) { //读取历元时间 trace(2,"rinex obs invalid epoch: epoch=%26.26s\n",buff); return 0; } for (i=0,j=32;i<n;i++,j+=3) { //循环读取卫星ID(G10、G32、G26) if (j>=68) { //读到68列,还没把卫星读完,就fgets()读取新的一行 if (!fgets(buff,MAXRNXLEN,fp)) break; j=32; } if (i<MAXOBS) { strncpy(satid,buff+j,3); sats[i]=satid2no(satid); //将卫星ID转为satellite number,存到sats[]数组中 } } } else { /* ver.3 */ if ((n=(int)str2num(buff,32,3))<=0) return 0; //读取卫星数量 *flag=(int)str2num(buff,31,1); //读取epoh flag if (3<=*flag&&*flag<=5) return n; //识别历元第一个字符是否匹配以及历元时间是否可以正常转换 if (buff[0]!='>'||str2time(buff,1,28,time)) { //读取历元时间, trace(2,"rinex obs invalid epoch: epoch=%29.29s\n",buff); return 0; } } trace(4,"decode_obsepoch: time=%s flag=%d\n",time_str(*time,3),*flag); return n; } - 2版本:
5、decode_obsdata():读取一个历元内一颗卫星的观测值
-
传入参数:
FILE *fp I 传入的Rinex文件指针 char *buff I fgets()读取到一行数据的首地址 double ver I Rinex文件版本 int mask I 卫星系统掩码 sigind_t *index I 观测数据类型索引 obsd_t *obs O 观测数据OBS -
执行流程:
- 3版本,读取卫星
satellite number存到obs->sat - 星系统和
mask做与运算,判断卫星系统是否启用 - 根据卫星系统分配索引
ind - 根据索引
ind中的观测值类型,循环读取观测值,读取一个历元内,一颗卫星的观测值,记录有效的观测值到val[i],记录记录信号失锁到lli[i] - 初始化
obs各观测值数组,赋空 - 遍历观测值类型,同频率的观测码,下标分别存到
k[],l[]中 ,p[]存频率索引,后面obs->P[0]就是利用L1载波观测到的伪距,obs->P[1]就是利用L2载波观测到的伪距 - 同一个频率有不同的观测码,取优先级高的
- 根据索引
ind中的观测值类型,遍历观测值,val[i]、lli[i]存入obs中
static int decode_obsdata(FILE *fp, char *buff, double ver, int mask, sigind_t *index, obsd_t *obs) { sigind_t *ind; double val[MAXOBSTYPE]={0}; uint8_t lli[MAXOBSTYPE]={0}; char satid[8]=""; int i,j,n,m,stat=1, p[MAXOBSTYPE], k[16], l[16]; trace(4,"decode_obsdata: ver=%.2f\n",ver); if (ver>2.99) { /* ver.3 */ sprintf(satid,"%.3s",buff); obs->sat=(uint8_t)satid2no(satid); //3版本,读取卫星satellite number存到obs->sat } if (!obs->sat) { trace(4,"decode_obsdata: unsupported sat sat=%s\n",satid); stat=0; } else if (!(satsys(obs->sat,NULL)&mask)) { //卫星系统和mask做与运算,判断卫星系统是否启用 stat=0; } /* read observation data fields */ //根据卫星系统分配索引 switch (satsys(obs->sat,NULL)) { case SYS_GLO: ind=index+1; break; case SYS_GAL: ind=index+2; break; case SYS_QZS: ind=index+3; break; case SYS_SBS: ind=index+4; break; case SYS_CMP: ind=index+5; break; case SYS_IRN: ind=index+6; break; default: ind=index ; break; } //根据索引ind中的观测值类型,循环读取观测值,读取一个历元内,一颗卫星的观测值 //2版本从0开始,3版本从3开始,一次读取16个字符(每一个卫星的观测数据) for (i=0,j=ver<=2.99?0:3;i<ind->n;i++,j+=16) { if (ver<=2.99&&j>=80) { /* ver.2 */ //2版本,一行读不完就fgets读下一行 if (!fgets(buff,MAXRNXLEN,fp)) break; j=0; } if (stat) { val[i]=str2num(buff,j,14)+ind->shift[i]; //记录有效的观测值 lli[i]=(uint8_t)str2num(buff,j+14,1)&3; //记录信号失锁,判定周跳? } } if (!stat) return 0; //初始化obs各观测值数组,赋空 for (i=0;i<NFREQ+NEXOBS;i++) { obs->P[i]=obs->L[i]=0.0; obs->D[i]=0.0f; obs->SNR[i]=obs->LLI[i]=obs->code[i]=0; } //遍历观测值类型,同频率的观测码,下标分别存到k[],l[]中 /* assign position in observation data */ for (i=n=m=0;i<ind->n;i++) { p[i]=(ver<=2.11)?ind->idx[i]:ind->pos[i]; if (ind->type[i]==0&&p[i]==0) k[n++]=i; /* C1? index */ if (ind->type[i]==0&&p[i]==1) l[m++]=i; /* C2? index */ } if (ver<=2.11) { //同一个频率有不同的观测码,取优先级高的 /* if multiple codes (C1/P1,C2/P2), select higher priority */ if (n>=2) { if (val[k[0]]==0.0&&val[k[1]]==0.0) { p[k[0]]=-1; p[k[1]]=-1; } else if (val[k[0]]!=0.0&&val[k[1]]==0.0) { p[k[0]]=0; p[k[1]]=-1; } else if (val[k[0]]==0.0&&val[k[1]]!=0.0) { p[k[0]]=-1; p[k[1]]=0; } else if (ind->pri[k[1]]>ind->pri[k[0]]) { p[k[1]]=0; p[k[0]]=NEXOBS<1?-1:NFREQ; } else { p[k[0]]=0; p[k[1]]=NEXOBS<1?-1:NFREQ; } } if (m>=2) { if (val[l[0]]==0.0&&val[l[1]]==0.0) { p[l[0]]=-1; p[l[1]]=-1; } else if (val[l[0]]!=0.0&&val[l[1]]==0.0) { p[l[0]]=1; p[l[1]]=-1; } else if (val[l[0]]==0.0&&val[l[1]]!=0.0) { p[l[0]]=-1; p[l[1]]=1; } else if (ind->pri[l[1]]>ind->pri[l[0]]) { p[l[1]]=1; p[l[0]]=NEXOBS<2?-1:NFREQ+1; } else { p[l[0]]=1; p[l[1]]=NEXOBS<2?-1:NFREQ+1; } } } // obs->P 代表着这个观测值结构体中的伪距观测值。不管是伪距观测值还是载波相位观测值和多普勒观测值,都是利用各种载波得到的 //obs->P[0]就是利用L1载波观测到的伪距,obs->P[1]就是利用L2载波观测到的伪距… /* save observation data */ //保存数据部分,每一个观测类型的组成包括: //观测值(保留三位小数) + LLI + 信号强度,所以obs指向的三个可能代表的就是这三个 //遍历观测值,存入obs中 for (i=0;i<ind->n;i++) { if (p[i]<0||val[i]==0.0) continue; switch (ind->type[i]) { case 0: obs->P[p[i]]=val[i]; obs->code[p[i]]=ind->code[i]; break; case 1: obs->L[p[i]]=val[i]; obs->LLI [p[i]]=lli[i]; break; case 2: obs->D[p[i]]=(float)val[i]; break; case 3: obs->SNR[p[i]]=(uint16_t)(val[i]/SNR_UNIT+0.5); break; } } trace(4,"decode_obsdata: time=%s sat=%2d\n",time_str(obs->time,0),obs->sat); return 1; } - 3版本,读取卫星
七、NAV星历文件读取
1、decode_navh()、decode_gnavh()、decode_hnavh()
以decode_navh()为例: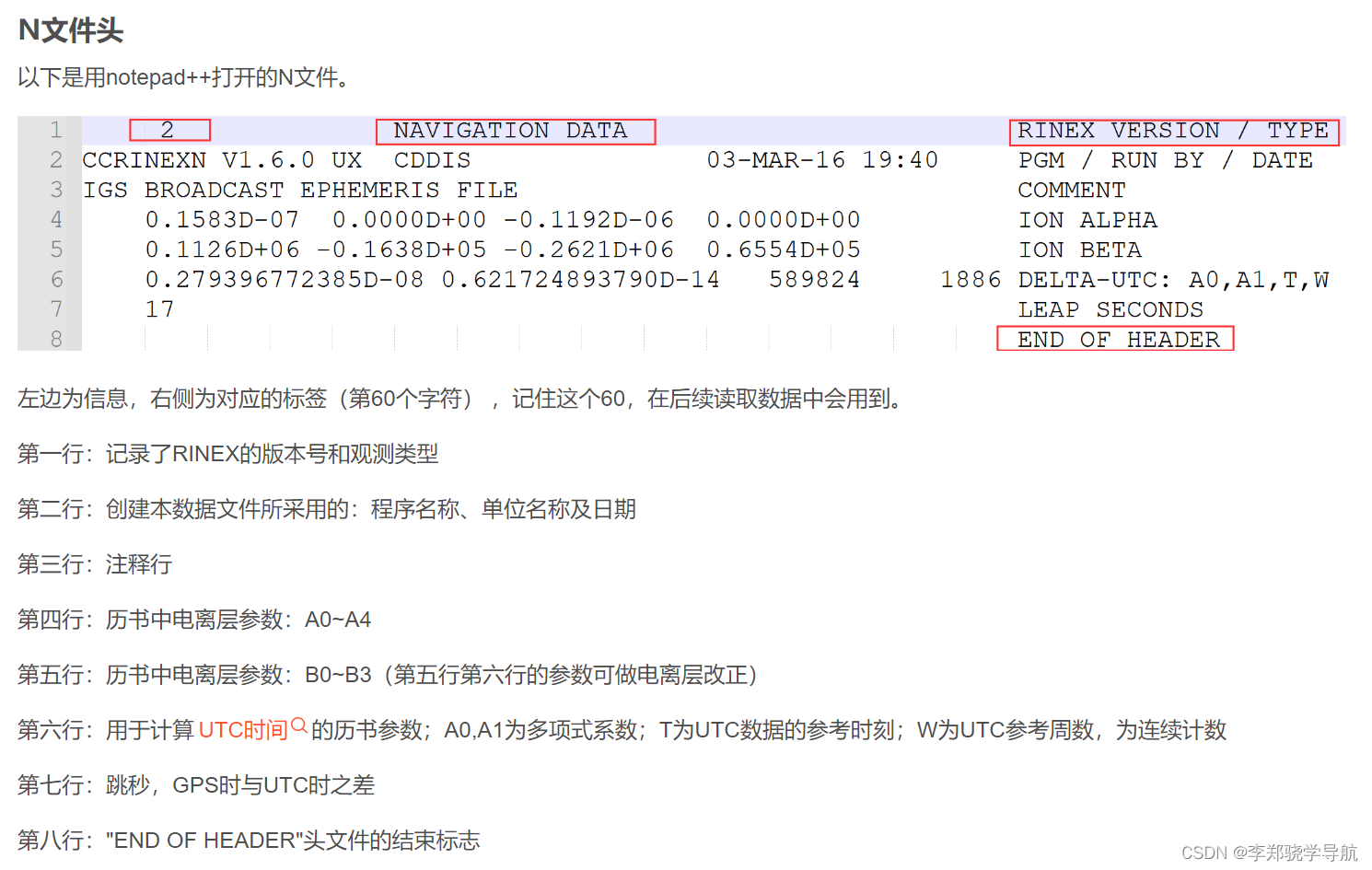
static void decode_navh(char *buff, nav_t *nav)
{
int i,j;
char *label=buff+60;
trace(4,"decode_navh:\n");
//读取电离层模型参数
if (strstr(label,"ION ALPHA" )) { /* opt ver.2 */
if (nav) {
for (i=0,j=2;i<4;i++,j+=12) nav->ion_gps[i]=str2num(buff,j,12);
}
}
else if (strstr(label,"ION BETA" )) { /* opt ver.2 */
if (nav) {
for (i=0,j=2;i<4;i++,j+=12) nav->ion_gps[i+4]=str2num(buff,j,12);
}
}
else if (strstr(label,"DELTA-UTC: A0,A1,T,W")) { /* opt ver.2 */
if (nav) {
for (i=0,j=3;i<2;i++,j+=19) nav->utc_gps[i]=str2num(buff,j,19);
for (;i<4;i++,j+=9) nav->utc_gps[i]=str2num(buff,j,9);
}
}
else if (strstr(label,"IONOSPHERIC CORR" )) { /* opt ver.3 */
if (nav) {
if (!strncmp(buff,"GPSA",4)) {
for (i=0,j=5;i<4;i++,j+=12) nav->ion_gps[i]=str2num(buff,j,12);
}
else if (!strncmp(buff,"GPSB",4)) {
for (i=0,j=5;i<4;i++,j+=12) nav->ion_gps[i+4]=str2num(buff,j,12);
}
else if (!strncmp(buff,"GAL",3)) {
for (i=0,j=5;i<4;i++,j+=12) nav->ion_gal[i]=str2num(buff,j,12);
}
else if (!strncmp(buff,"QZSA",4)) { /* v.3.02 */
for (i=0,j=5;i<4;i++,j+=12) nav->ion_qzs[i]=str2num(buff,j,12);
}
else if (!strncmp(buff,"QZSB",4)) { /* v.3.02 */
for (i=0,j=5;i<4;i++,j+=12) nav->ion_qzs[i+4]=str2num(buff,j,12);
}
else if (!strncmp(buff,"BDSA",4)) { /* v.3.02 */
for (i=0,j=5;i<4;i++,j+=12) nav->ion_cmp[i]=str2num(buff,j,12);
}
else if (!strncmp(buff,"BDSB",4)) { /* v.3.02 */
for (i=0,j=5;i<4;i++,j+=12) nav->ion_cmp[i+4]=str2num(buff,j,12);
}
else if (!strncmp(buff,"IRNA",4)) { /* v.3.03 */
for (i=0,j=5;i<4;i++,j+=12) nav->ion_irn[i]=str2num(buff,j,12);
}
else if (!strncmp(buff,"IRNB",4)) { /* v.3.03 */
for (i=0,j=5;i<4;i++,j+=12) nav->ion_irn[i+4]=str2num(buff,j,12);
}
}
}
//读取时间系统改正参数
else if (strstr(label,"TIME SYSTEM CORR" )) { /* opt ver.3 */
if (nav) {
if (!strncmp(buff,"GPUT",4)) {
nav->utc_gps[0]=str2num(buff, 5,17);
nav->utc_gps[1]=str2num(buff,22,16);
nav->utc_gps[2]=str2num(buff,38, 7);
nav->utc_gps[3]=str2num(buff,45, 5);
}
else if (!strncmp(buff,"GLUT",4)) {
nav->utc_glo[0]=-str2num(buff,5,17); /* tau_C */
}
else if (!strncmp(buff,"GLGP",4)) {
nav->utc_glo[1]=str2num(buff, 5,17); /* tau_GPS */
}
else if (!strncmp(buff,"GAUT",4)) { /* v.3.02 */
nav->utc_gal[0]=str2num(buff, 5,17);
nav->utc_gal[1]=str2num(buff,22,16);
nav->utc_gal[2]=str2num(buff,38, 7);
nav->utc_gal[3]=str2num(buff,45, 5);
}
else if (!strncmp(buff,"QZUT",4)) { /* v.3.02 */
nav->utc_qzs[0]=str2num(buff, 5,17);
nav->utc_qzs[1]=str2num(buff,22,16);
nav->utc_qzs[2]=str2num(buff,38, 7);
nav->utc_qzs[3]=str2num(buff,45, 5);
}
else if (!strncmp(buff,"BDUT",4)) { /* v.3.02 */
nav->utc_cmp[0]=str2num(buff, 5,17);
nav->utc_cmp[1]=str2num(buff,22,16);
nav->utc_cmp[2]=str2num(buff,38, 7);
nav->utc_cmp[3]=str2num(buff,45, 5);
}
else if (!strncmp(buff,"SBUT",4)) { /* v.3.02 */
nav->utc_sbs[0]=str2num(buff, 5,17);
nav->utc_sbs[1]=str2num(buff,22,16);
nav->utc_sbs[2]=str2num(buff,38, 7);
nav->utc_sbs[3]=str2num(buff,45, 5);
}
else if (!strncmp(buff,"IRUT",4)) { /* v.3.03 */
nav->utc_irn[0]=str2num(buff, 5,17);
nav->utc_irn[1]=str2num(buff,22,16);
nav->utc_irn[2]=str2num(buff,38, 7);
nav->utc_irn[3]=str2num(buff,45, 5);
nav->utc_irn[8]=0.0; /* A2 */
}
}
}
//读取跳秒参数
else if (strstr(label,"LEAP SECONDS" )) { /* opt */
if (nav) {
nav->utc_gps[4]=str2num(buff, 0,6);
nav->utc_gps[7]=str2num(buff, 6,6);
nav->utc_gps[5]=str2num(buff,12,6);
nav->utc_gps[6]=str2num(buff,18,6);
}
}
}
2、readrnxnav():读取星历文件,添加到nav结构体中
- add_eph():nav->eph[] 中添加eph星历数据,nav->n 表示NAV数量。
- add_geph():nav->geph[] 中添加GLONASS星历数据,nav->ng 表示geph数量。
- add_seph():nav->seph[] 中添加SBAS星历数据,nav->ns 表示seph数量。
static int readrnxnav(FILE *fp, const char *opt, double ver, int sys,
nav_t *nav)
{
eph_t eph;
geph_t geph;
seph_t seph;
int stat,type;
trace(3,"readrnxnav: ver=%.2f sys=%d\n",ver,sys);
if (!nav) return 0;
//调用readrnxnavb读取文件,然后根据星历类型选择函数保存
/* read RINEX navigation data body */
while ((stat=readrnxnavb(fp,opt,ver,sys,&type,&eph,&geph,&seph))>=0) {
/* add ephemeris to navigation data */
if (stat) {
switch (type) {
case 1 : stat=add_geph(nav,&geph); break;
case 2 : stat=add_seph(nav,&seph); break;
default: stat=add_eph (nav,&eph ); break;
}
if (!stat) return 0;
}
}
return nav->n>0||nav->ng>0||nav->ns>0;
}
3、readrnxnavb():读取一个历元的星历数据,添加到eph结构体中
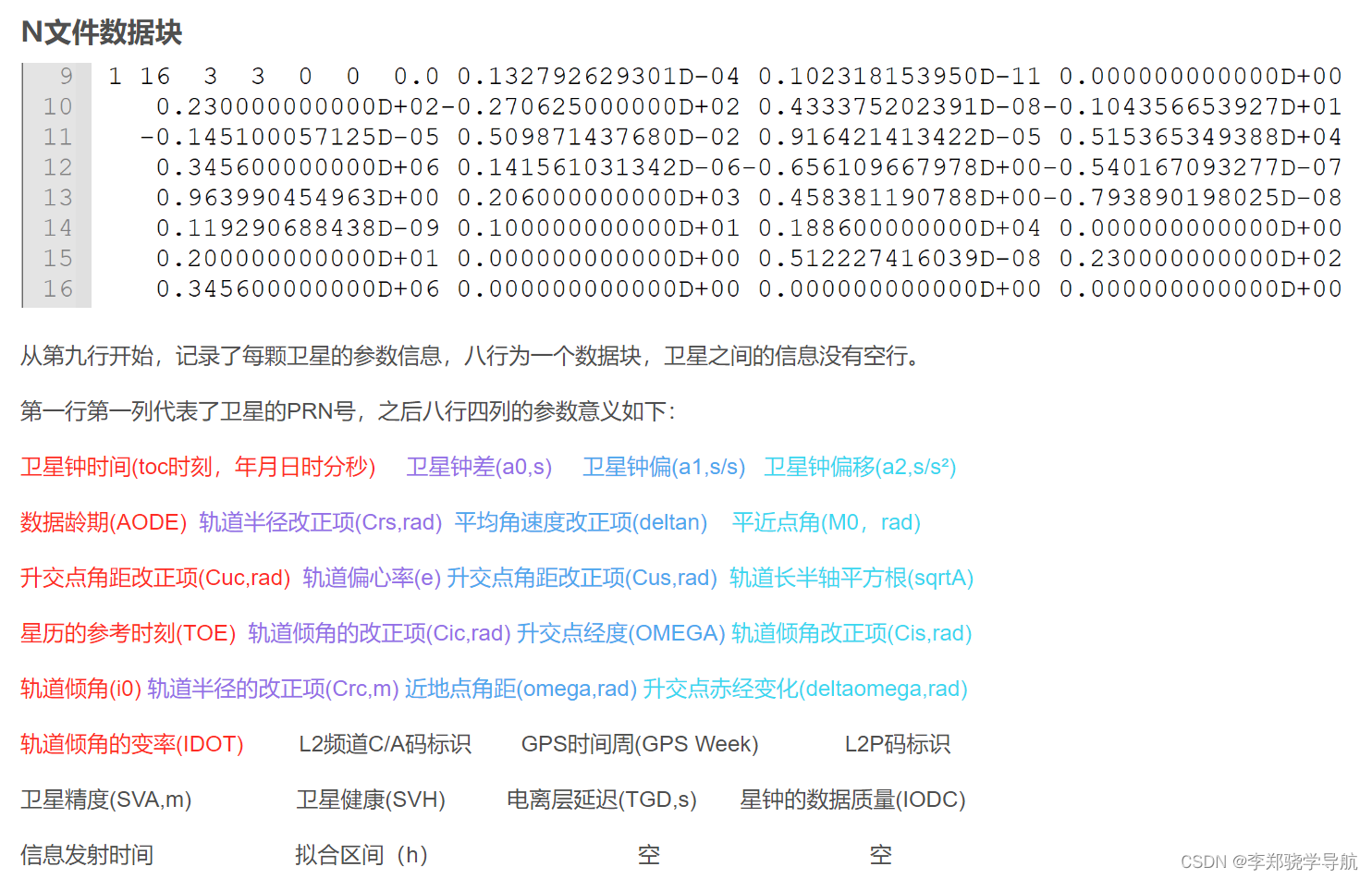
- nav数据文件体结构:卫星PRN号、卫星时间TOC、参数
-
执行流程:
-
调用
set_sysmask()获取卫星系统掩码 -
循环读取一行行,记录TOC,读取到
data[],i记录读取的数据数量,读够数量调用decode_eph()等函数赋值给eph_t结构体
-
static int readrnxnavb(FILE *fp, const char *opt, double ver, int sys,
int *type, eph_t *eph, geph_t *geph, seph_t *seph)
{
gtime_t toc;
double data[64];
int i=0,j,prn,sat=0,sp=3,mask;
char buff[MAXRNXLEN],id[8]="",*p;
trace(4,"readrnxnavb: ver=%.2f sys=%d\n",ver,sys);
/* set system mask */
mask=set_sysmask(opt); //设置卫星系统掩码
//循环读取一行行,读取到data[],i记录读取的数据数量,读够数量进入decode_eph()赋值给eph_t结构体
while (fgets(buff,MAXRNXLEN,fp)) {
if (i==0) {
/* decode satellite field */
if (ver>=3.0||sys==SYS_GAL||sys==SYS_QZS) { /* ver.3 or GAL/QZS */
sprintf(id,"%.3s",buff);
sat=satid2no(id);
sp=4; //3以上版本,GALileo,QZSS sp都为4
if (ver>=3.0) {
sys=satsys(sat,NULL);
if (!sys) {
sys=(id[0]=='S')?SYS_SBS:((id[0]=='R')?SYS_GLO:SYS_GPS);
}
}
}
else {
prn=(int)str2num(buff,0,2);
if (sys==SYS_SBS) {
sat=satno(SYS_SBS,prn+100);
}
else if (sys==SYS_GLO) {
sat=satno(SYS_GLO,prn);
}
else if (93<=prn&&prn<=97) { /* extension */
sat=satno(SYS_QZS,prn+100);
}
else sat=satno(SYS_GPS,prn);
}
/* decode Toc field */
if (str2time(buff+sp,0,19,&toc)) { //读取卫星钟时间TOC
trace(2,"rinex nav toc error: %23.23s\n",buff);
return 0;
}
/* decode data fields */
for (j=0,p=buff+sp+19;j<3;j++,p+=19) { //首行数据读3列,除了TOC还有3列
data[i++]=str2num(p,0,19);
}
}
else {
/* decode data fields */
for (j=0,p=buff+sp;j<4;j++,p+=19) { //其它行数据都读4列
data[i++]=str2num(p,0,19);
}
/* decode ephemeris */
if (sys==SYS_GLO&&i>=15) {
if (!(mask&sys)) return 0;
*type=1;
return decode_geph(ver,sat,toc,data,geph);
}
else if (sys==SYS_SBS&&i>=15) {
if (!(mask&sys)) return 0;
*type=2;
return decode_seph(ver,sat,toc,data,seph);
}
else if (i>=31) {
if (!(mask&sys)) return 0;
*type=0;
return decode_eph(ver,sat,toc,data,eph);
}
}
}
return -1;
}
- 调用函数:
- decode_eph():将
data[]中信息赋值到eph_t类型结构体eph - decode_geph():将
data[]中信息赋值到geph_t类型结构体geph - decode_seph():将
data[]中信息赋值到seph_t类型结构体seph
- decode_eph():将
















 2794
2794











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











