







我是跟着David Silver 的视频和PPT(链接:http://davidsilver.uk/teaching/)来学习强化学习的,虽然很多人已经写了很多这方面的笔记了,但是我还是觉得应该学一点,记一点,因为我认为写是一个理清思路、加深理解的好方法。希望能坚持学下去,写下去。笔记主要是翻译并记录PPT中的内容,再加上一些个人的理解。
强化学习简介
一、机器学习方法的类型
我们知道机器学习可以分为三种:有监督、无监督、强化学习。David对于三者关系的概括如图1。
图1 讲义中对三种机器学习方法关系的说明
二、强化学习的特点
- 是无监督的,只有一个奖励信号
- 反馈具有延迟
- 时序的
- 智能体的行为影响其后续获得的数据
三、应用场景
- 直升机的控制
- 游戏
- 人行机器人的行走
四、强化学习中的要素
(一)奖励(Rewards)
目标:选择动作使得未来的总奖励最大。
(二)环境(Environment)

图2 智能体和环境
智能体:每一次行动后从环境中得到一个观察,得到一个奖励;
环境:感知到一个行为后,给出一个环境的观察和一个奖励。
(三)状态
历史:观测、行为、奖励的序列

状态:用于决定下一时刻将要发生的事件的信息
二者的关系:
![]()
而状态又可以分为:
1.环境状态
2.智能体状态:强化学习的算法使用的信息
3.信息状态:包含所有来自历史的有用信息
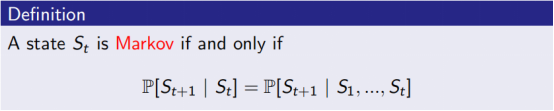
- 有了当前的状态后,将来的状态独立于历史状态了
![]()
- 环境状态是马尔科夫的
- 历史是马尔科夫的
从可见性角度可以分为:全部可见环境和部分可见环境
五、关于智能体
一个智能体可能由以下一个或多个要素组成:
- 策略(policy)
- 价值函数(value function)
- 模型(model)















 1688
1688











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









