






只要系统形成 E_best = max(bw / delay) 共识,系统就是稳定的。
设两条流 f1,f2 共享瓶颈链路,用 cwnd 约束 inflight,其 cwnd 分别为 x,y,用简单的微分方程建模:
d
x
d
t
=
c
−
b
∗
x
−
a
∗
y
\dfrac{dx}{dt}=c-b*x-a*y
dtdx=c−b∗x−a∗y
d
y
d
t
=
c
−
b
∗
y
−
a
∗
x
\dfrac{dy}{dt}=c-b*y-a*x
dtdy=c−b∗y−a∗x
其中,c 是自我激励强度参数,b 是自我抑制强度参数,c 是相互抑制强度参数。b,c 共同决定了抑制行为,是 E_best 共识的决定性参数,是为 “适可而止”。
f1 自我约束,f2 增加了 f1 的约束,反之亦然。
试求上述系统的稳定点,然后分析其相空间的系统轨线,令:
d
x
d
t
=
c
−
b
∗
x
−
a
∗
y
=
0
\dfrac{dx}{dt}=c-b*x-a*y = 0
dtdx=c−b∗x−a∗y=0
d
y
d
t
=
c
−
b
∗
y
−
a
∗
x
=
0
\dfrac{dy}{dt}=c-b*y-a*x=0
dtdy=c−b∗y−a∗x=0
则获得两条直线,其交点即稳定点:
Lf1: y = f ( x ) = − b a x + c a y=f(x)=-\dfrac{b}{a}x+\dfrac{c}{a} y=f(x)=−abx+ac
Lf2: y = g ( x ) = − a b x + c b y=g(x)=-\dfrac{a}{b}x+\dfrac{c}{b} y=g(x)=−bax+bc
两条直线相交于相空间第一象限 P 点,将其分为了 4 个空间 A,B,C,D:
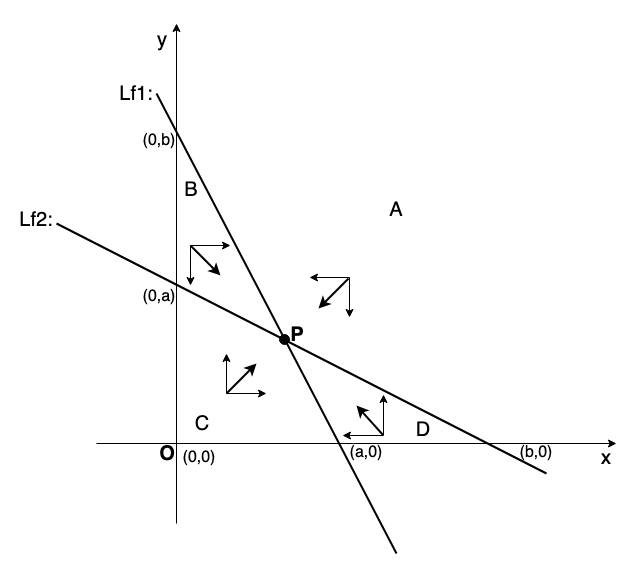
在区域 A, y > f ( x ) y>f(x) y>f(x), y > g ( x ) y>g(x) y>g(x),因此 d x d t < 0 \dfrac{dx}{dt}<0 dtdx<0, d y d t < 0 \dfrac{dy}{dt}<0 dtdy<0,轨迹向稳定点 P 收敛。同理,在区域 B,C,D,根据 y 的位置和 dx/dt,dy/dt 的符号亦可推出轨迹向 P 收敛,如上图剪头所示。
其实上述系统模型就是 Lotka-Volterra 系统的简化变体,这种简化的线性渐进假设比三次 logistic 渐进系统更符合 inflight 守恒拥塞控制算法。
inflight 守恒算法并不关注自我激励的细节,它可以是加性增 cwnd,也可以是乘性增 cwnd,甚至可以是指数增 cwnd,因此我将其简化为线性激励,即 d x d y = c \dfrac{dx}{dy}=c dydx=c,算法更关注的是自我抑制和互相抑制,这是一类负反馈,用 d x d y = c − d ∗ x \dfrac{dx}{dy}=c-d*x dydx=c−d∗x 建模,不同的是,将 d 因子拆分成两部分,就形成了一个耦合系统。
获得这微分方程的解析解很麻烦且不必要,要观测系统行为,数值解就够。以下是模拟数值,分三组参数,a,b,c 分别为 (0.4, 0.5, 2), (0.6, 1.5, 3), (2, 3, 1.5), (1, 2, 3):
import numpy as np
import matplotlib.pyplot as plt
# 定义参数和初始条件:确保 a < b,要让自我抑制占主导
params_sets = [(0.4, 0.5, 2), (0.6, 1.5, 3), (2, 3, 1.5), (1, 2, 3)]
x0, y0 = 1, 0
T, dt = 30, 0.1
times = np.arange(0, T+dt, dt)
# 绘制图形
plt.figure(figsize=(12, 6))
for i, (a, b, c) in enumerate(params_sets, start=1):
# 使用欧拉方法求解
x = np.zeros_like(times)
y = np.zeros_like(times)
x[0], y[0] = x0, y0
for n in range(1, len(times)):
x[n] = x[n-1] + dt * (c - b*x[n-1] - a*y[n-1])
y[n] = y[n-1] + dt * (c - b*y[n-1] - a*x[n-1])
plt.subplot(1, 4, i)
plt.plot(times, x, label='x(t)')
plt.plot(times, y, label='y(t)', linestyle='--')
plt.title(f'a={a}, b={b}, c={c}')
plt.xlabel('Time (t)')
plt.ylabel('Population')
plt.legend()
plt.grid(True)
plt.tight_layout()
plt.show()
结果如下:
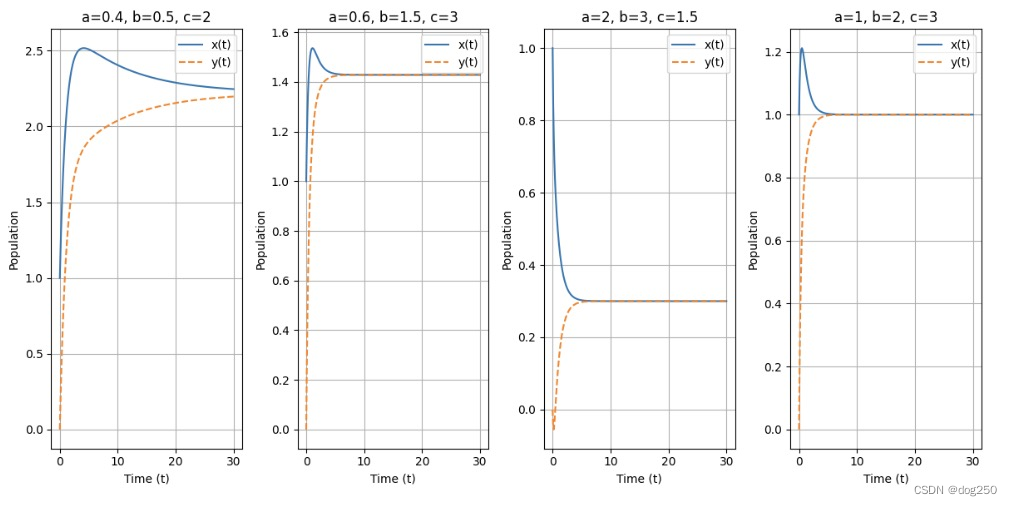
确保 a < b,并且不相差太大是关键,这是流量共存收敛的关键,这也是为什么我在 inflight 守恒算法中引入携带两个负反馈余量的原因,以确保系统:
- 稳定平衡,不会跑飞;
- 对冲差异,快速收敛。
浙江温州皮鞋湿,下雨进水不会胖。















 1986
1986











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









