






一. 采用stm32F103和HC-SR04超声波模块, 使用标准库或HAL库+ 定时器中断,完成1或2路的超声波障碍物测距功能。
CubeMX配置:
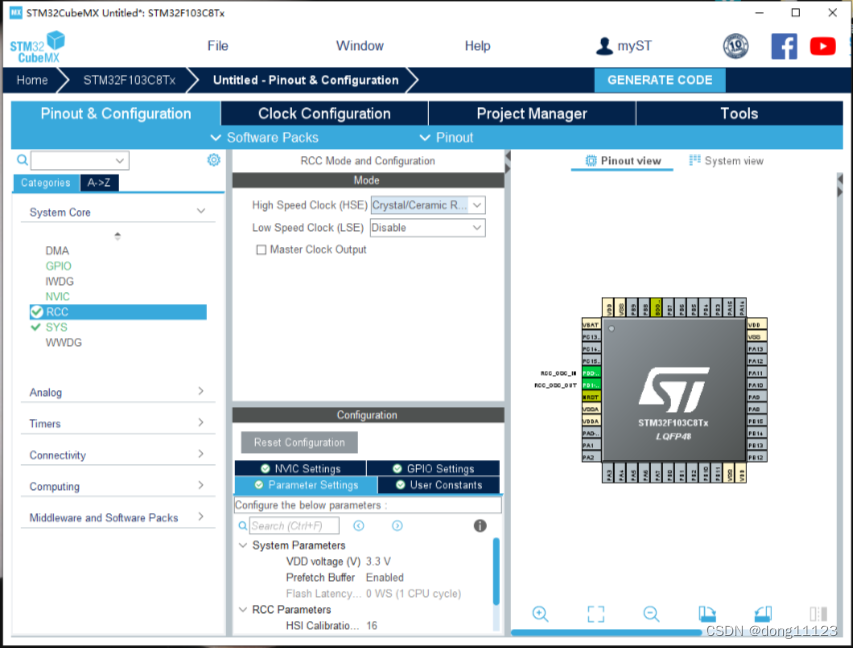
1、RCC配置外部高速晶振——HSE
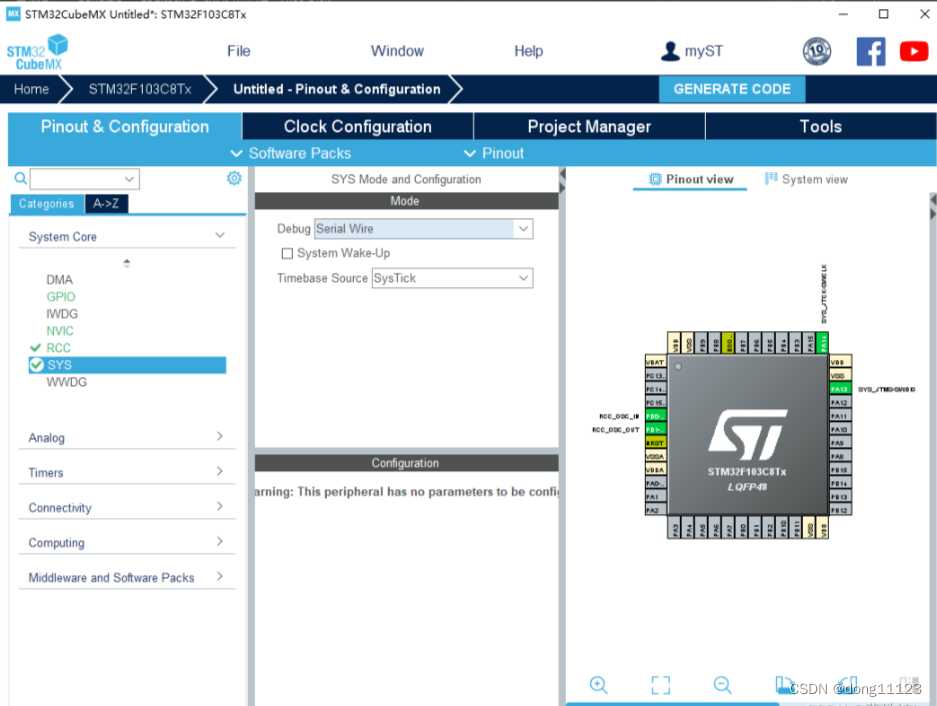
 2、SYS配置:Debug设置成Serial Wire
2、SYS配置:Debug设置成Serial Wire
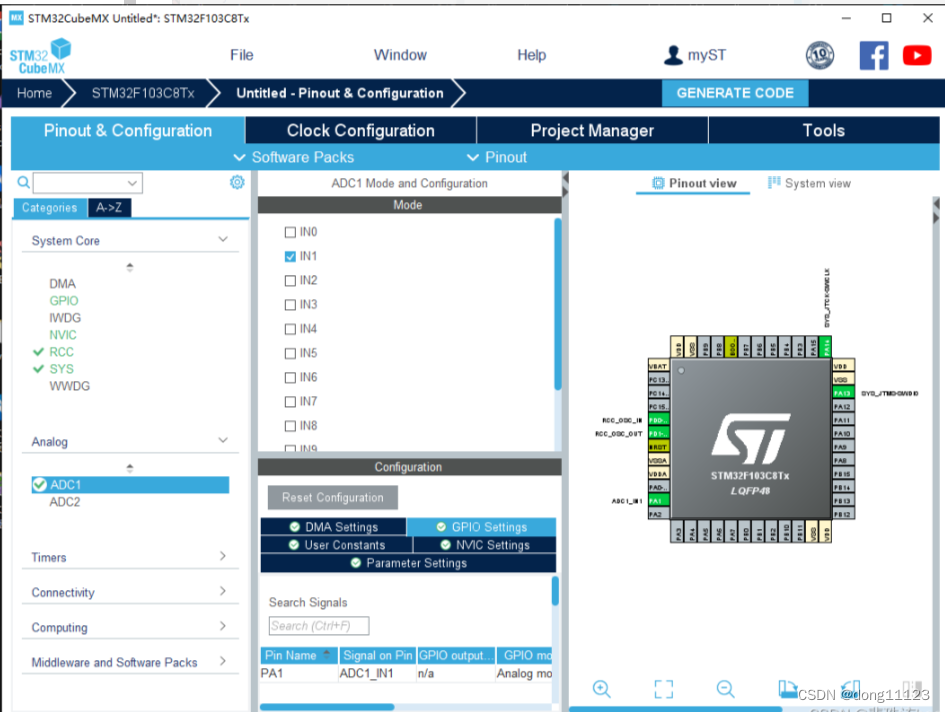
ADC1配置:配置ADC-IN1模数转换
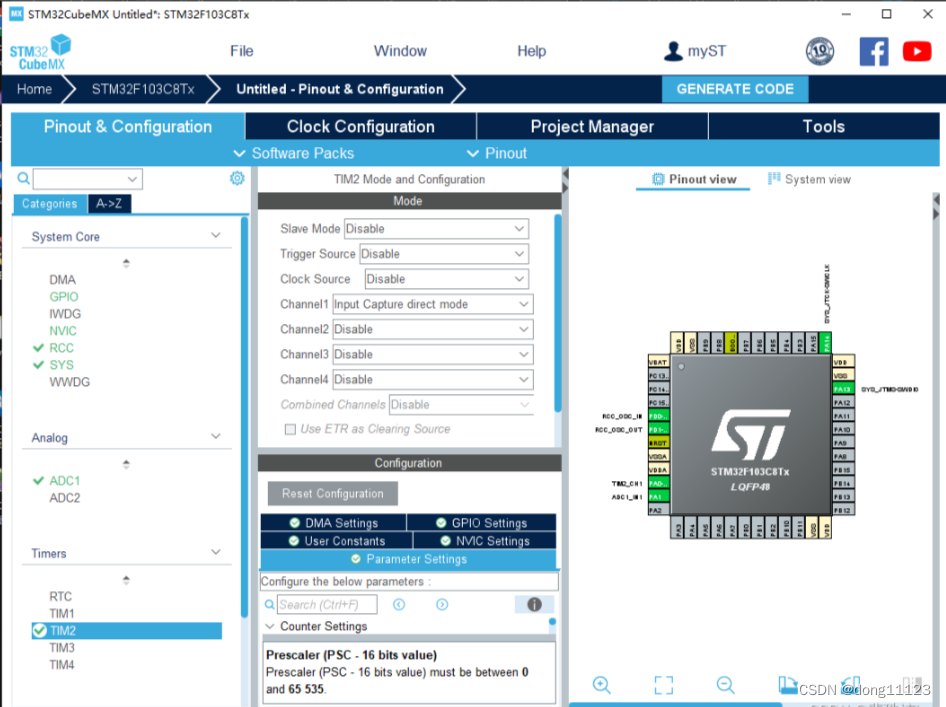
TIM2配置:设置定时器TIM2每1us向上计数一次,通道1为上升沿捕获并连接到超声波模块的ECHO引脚
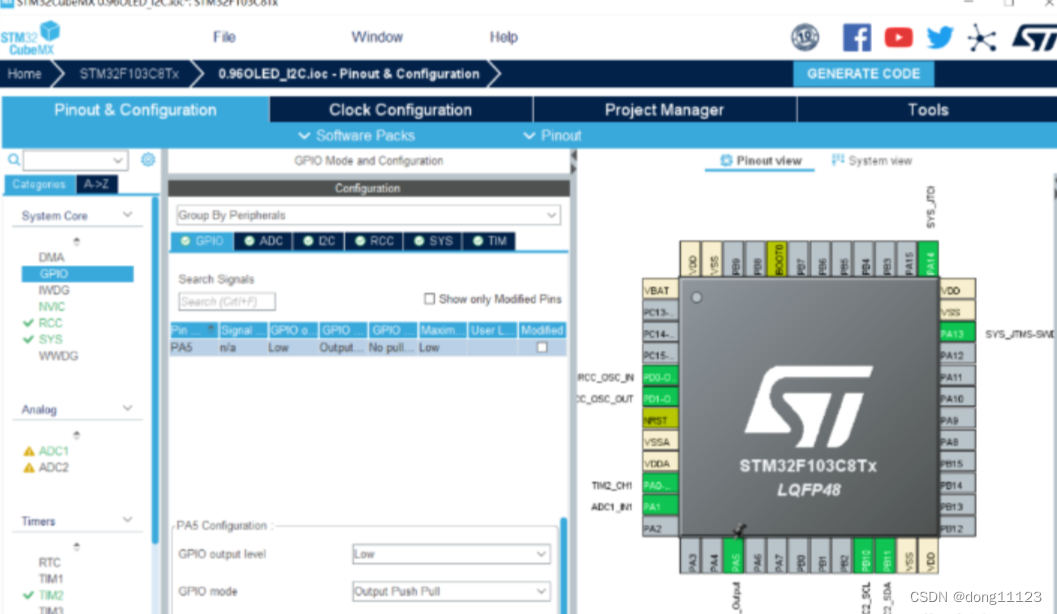
GPIO配置:PA5接到了HC-SR04的TRIG触发引脚,默认输出低电平
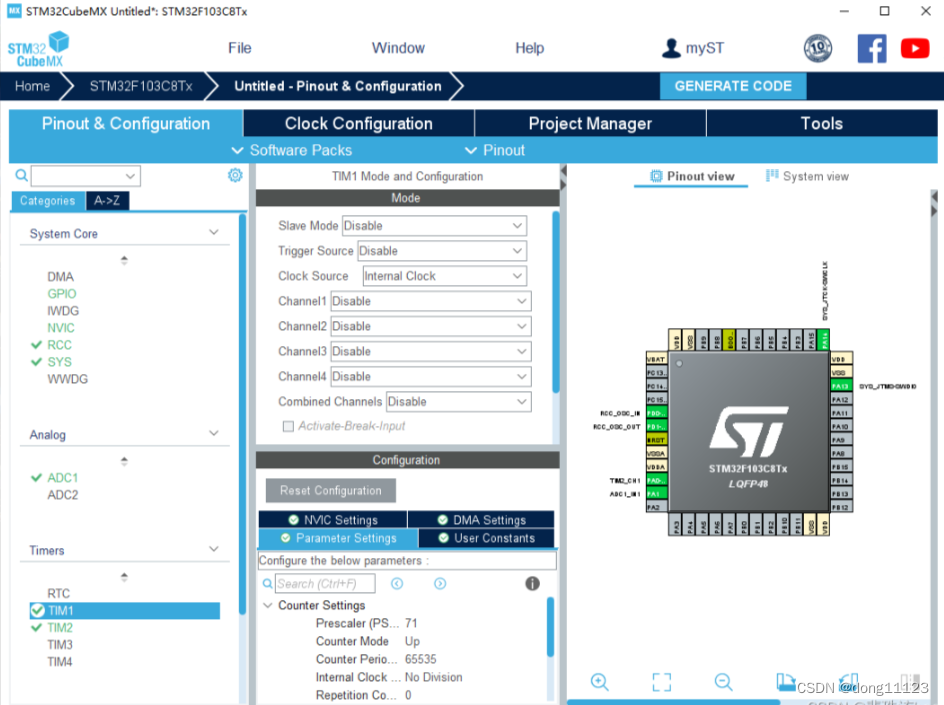
TIM1配置:由上面可知HC-SR04的使用需要us级的延迟函数,HAL库自带只有ms的,所以需要自己设计一个定时器
超声波模块代码
#include "SR04.h"
float distant; //测量距离
uint32_t measure_Buf[3] = {0}; //存放定时器计数值的数组
float distances[5]={0};
uint8_t measure_Cnt = 0; //状态标志位
uint32_t high_time; //超声波模块返回的高电平时间
uint8_t n=0;
//===============================================读取距离
void SR04_GetData(void)
{
switch (measure_Cnt){
case 0:
TRIG_H;
delay_us(30);
TRIG_L;
measure_Cnt++;
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); //启动输入捕获 或者: __HAL_TIM_ENABLE(&htim5);
break;
case 3:
high_time = measure_Buf[1]- measure_Buf[0]; //高电平时间
distant=(high_time*0.00034)/2; //单位cm
distances[n]=distant;
n++;
if(n>=5){// 采用1、4、6、4、1的高斯核进行滤波
n=0;
distant=(distances[0]+4*distances[1]+6*distances[2]+4*distances[3]+distances[4])/16;
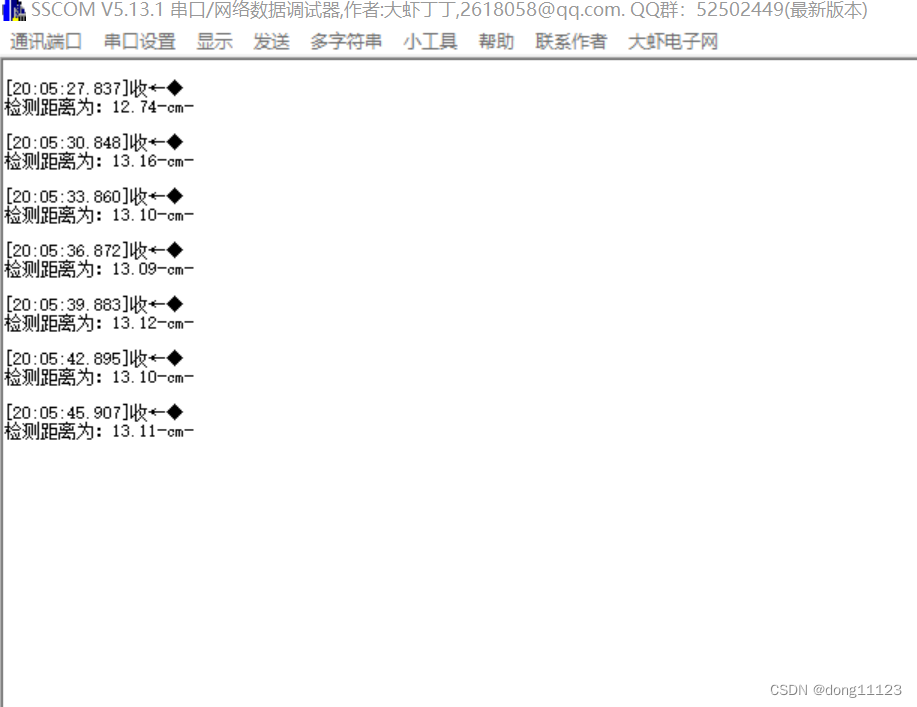
printf("\r\n检测距离为:%.2f-cm-\r\n",distant);
}
measure_Cnt = 0; //清空标志位
TIM2->CNT=0; //清空计时器计数
break;
}
}
//===============================================us延时函数
void delay_us(uint32_t us)//主频72M
{
uint32_t delay = (HAL_RCC_GetHCLKFreq() / 4000000 * us);
while (delay--)
{
;
}
}
//===============================================中断回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//
{
if(TIM2 == htim->Instance)// 判断触发的中断的定时器为TIM2
{
switch(measure_Cnt){
case 1:
measure_Buf[0] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING); //设置为下降沿捕获。
measure_Cnt++;
break;
case 2:
measure_Buf[1] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.
HAL_TIM_IC_Stop_IT(&htim2,TIM_CHANNEL_1); //停止捕获 或者: __HAL_TIM_DISABLE(&htim5);
measure_Cnt++;
}
}
}
效果展示
二. 当前智能汽车上一般配置有12路超声波雷达,这些专用超声波雷达内置了MCU,直接输出数字化的测距结果,一般硬件接口采用串口RS485,通信协议采用modbus。请思考:
1)RS485与RS232(UART)有什么不同?
1. 通信方式
RS485:
差分信号传输:使用一对平衡信号线(A和B)进行差分传输,可以有效抵抗电磁干扰,提高通信可靠性。
多点通信:支持多点总线结构,最多可以连接32个驱动器和32个接收器(有扩展可支持更多设备)。
半双工/全双工:通常采用半双工通信(两线制),但也可以实现全双工通信(四线制)。
RS232:
单端信号传输:使用单端信号传输,相对于地传输信号,抗干扰能力较差。
点对点通信:只能实现点对点通信,通常只连接两个设备(一个发送,一个接收)。
全双工:可以同时发送和接收数据。
2. 信号电平
RS485:
差分信号电平:典型情况下,差分电压在+5V和-5V之间。
RS232:
单端信号电平:逻辑高电平(通常为-3V到-15V),逻辑低电平(通常为+3V到+15V)。
3. 传输速率
RS485:
支持较高的传输速率,通常可以达到10 Mbps(距离越短速率越高)。
RS232:
传输速率较低,通常为115200 bps,最高可达1 Mbps(距离越短速率越高)。
2)Modbus协议是什么?
Modbus协议是一种用于电子控制器之间通信的开放式协议,最早由Modicon(现为施耐德电气的一部分)在1979年开发。它已成为工业自动化和控制系统中广泛使用的通信标准。Modbus协议主要用于连接监控计算机与远程终端单元(RTU),以及不同种类的传感器和仪表之间的数据交换。
Modbus协议的主要特点
开放性:Modbus是一个开放协议,这意味着任何制造商都可以免费使用它来开发自己的Modbus设备。
简单性:Modbus协议相对简单,易于实现,特别适合资源有限的嵌入式系统。
灵活性:Modbus可以在多种通信介质上传输,包括串行通信(RS232、RS485)、以太网(Modbus TCP/IP)、以及通过各种无线技术。
Modbus的通信方式
Modbus RTU(Remote Terminal Unit):
传输方式:使用RS232或RS485串行通信。
数据帧格式:数据以二进制形式传输,包含地址、功能码、数据、校验码(CRC)等字段。
适用场景:多用于工业现场,支持远距离和多点通信。
Modbus ASCII:
传输方式:使用RS232或RS485串行通信。
数据帧格式:数据以ASCII码形式传输,每个字节用两个ASCII字符表示,具有起始符(冒号)、地址、功能码、数据、校验码(LRC)、结束符(回车换行)。
适用场景:较少使用于工业现场,通常在一些需要与人进行交互或需要易读性的场景中使用。
Modbus TCP/IP:
传输方式:使用以太网通信。
数据帧格式:封装在TCP/IP报文中,适用于以太网环境。
适用场景:工业自动化系统中需要快速、可靠的通信,常用于PLC、HMI、SCADA系统之间的数据交换。
Modbus协议的工作模式
主/从(Master/Slave)模式:
主设备(Master)发起通信,发送请求,等待从设备(Slave)的响应。
从设备(Slave)被动响应主设备的请求,不能主动发送数据。
适用于Modbus RTU和Modbus ASCII通信模式。
客户端/服务器(Client/Server)模式:
客户端(Client)发起通信,发送请求,服务器(Server)被动响应。
适用于Modbus TCP/IP通信模式。
Modbus帧结构
Modbus通信中的数据帧结构大致如下:
地址域:标识目标设备的地址。
功能码:表示执行的操作,例如读写寄存器。
数据域:包含具体的操作数据。
错误校验码:用于检测通信错误(如CRC或LRC)。
Modbus协议的应用
工业自动化:广泛用于PLC、DCS、SCADA系统的集成和数据交换。
能源管理:电力监控系统、智能电表等。
过程控制:工厂自动化、过程监控、传感器数据采集。
3)如果让你设计一款 12路车载超声波雷达,采用 stm32F103+HC-SR04超声波模块,对外提供RS485和Modbus协议,你的设计方案是什么?
设计一款12路车载超声波雷达系统,采用STM32F103微控制器和HC-SR04超声波模块,并对外提供RS485和Modbus协议通信,涉及多个硬件和软件层面的细节。以下是一个详细的设计方案:
a、硬件设计
1. 主要组件
微控制器:STM32F103
超声波模块:12个HC-SR04
RS485收发器:如MAX485
电源管理:稳压电源模块,为系统提供稳定的5V和3.3V电压
其他:电容、电阻、连接线等
2. 硬件连接
HC-SR04超声波模块连接:
每个HC-SR04模块需要连接4个引脚:VCC、GND、Trig和Echo。
VCC和GND连接到电源和地。
Trig和Echo引脚分别连接到STM32F103的GPIO引脚。
RS485通信模块连接:
使用MAX485或类似的RS485收发器模块。
收发器的DE和RE引脚可以连接在一起,由STM32F103的GPIO控制(使能和禁用)。
DI引脚连接到STM32F103的UART TX引脚,RO引脚连接到STM32F103的UART RX引脚。
电源管理:
使用DC-DC稳压模块将车载电源(如12V)降压到5V,用于供电HC-SR04模块和STM32F103。
可能需要进一步降压到3.3V供电STM32F103(如果它需要3.3V)。
b、软件设计
1. STM32F103固件开发
开发环境:使用Keil uVision或STM32CubeIDE。
外设初始化:
初始化GPIO,用于HC-SR04模块的Trig和Echo引脚。
初始化USART,用于RS485通信。
初始化定时器,用于测量HC-SR04的回声脉冲宽度。
超声波测距功能:
为每个HC-SR04模块配置一个Trig引脚和一个Echo引脚。
通过Trig引脚发送10µs的高电平脉冲,触发超声波发送。
使用定时器捕获Echo引脚的高电平持续时间,并计算距离。
多路超声波测距:
采用轮询或定时触发方式,逐个触发12个HC-SR04模块,并读取测量结果。
2. Modbus协议实现
Modbus RTU协议栈:
实现Modbus RTU主/从模式(通常作为从设备)。
实现基本的Modbus功能码,例如读取保持寄存器(0x03)、写单个寄存器(0x06)、写多个寄存器(0x10)等。
数据处理和存储:
将超声波测得的距离数据存储在特定的寄存器中,以便通过Modbus协议读取。
每个HC-SR04模块对应一个或多个寄存器。
RS485通信:
实现RS485收发控制,在发送数据前使能发送,在接收数据后禁用发送。
处理Modbus请求和响应,通过RS485接口进行数据交换。















 1818
1818

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









