






实验原理
理论原理
超声波原理:
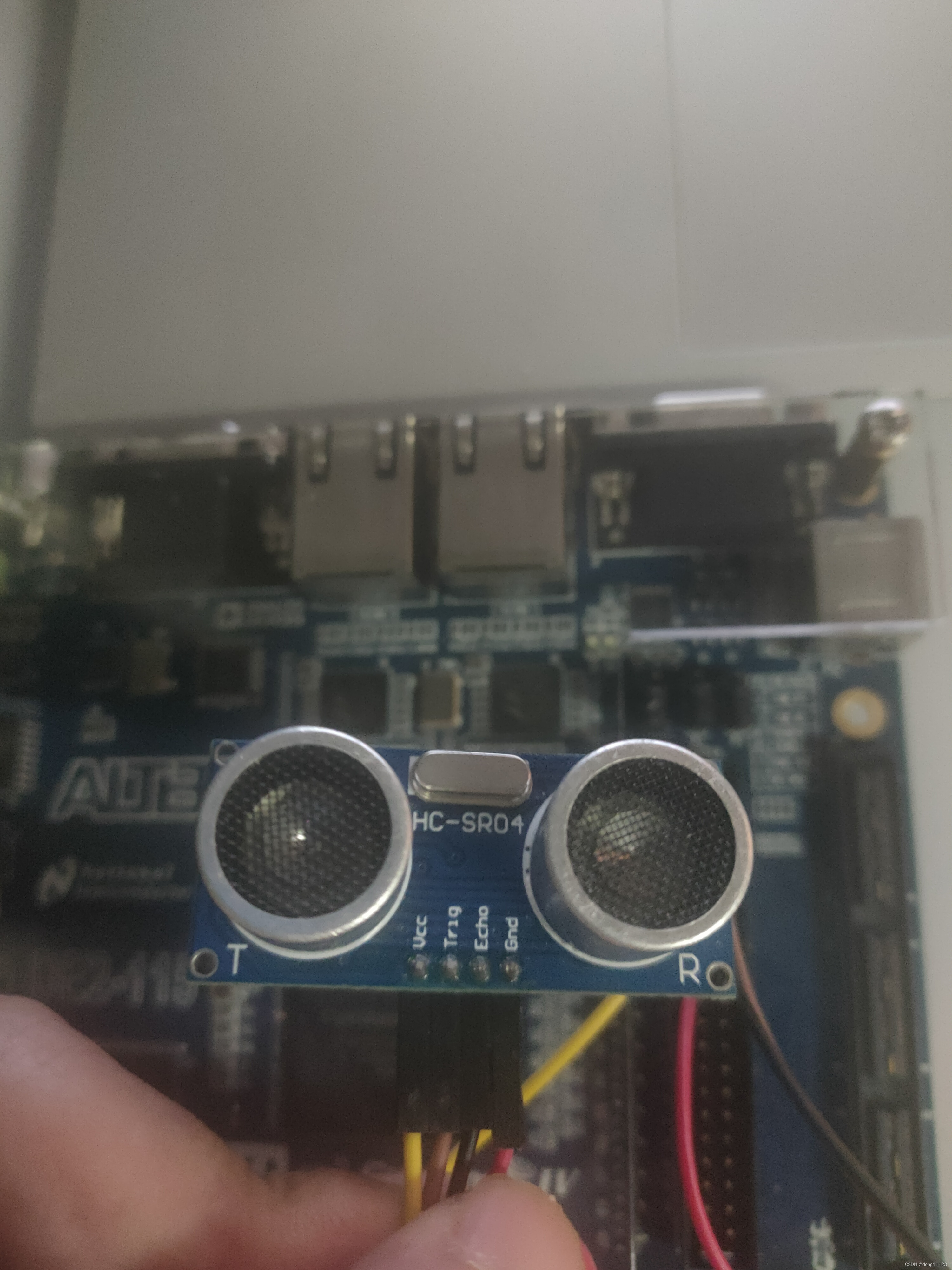
HC-SR04超声波测距模块可提供 2cm-400cm的非接触式距离感测功能,测距精度可达高到 3mm;模块包括超声波发射器、接收器与控制电路。图1为HC-SR04外观,其基本工作原理为给予此超声波测距模块触发信号后模块发射超声波,当超声波投射到物体而反射回来时,模块输出回响信号,以触发信号和回响信号间的时间差,来判定物体的距离。

硬件时序模块

系统架构设计

模块说明
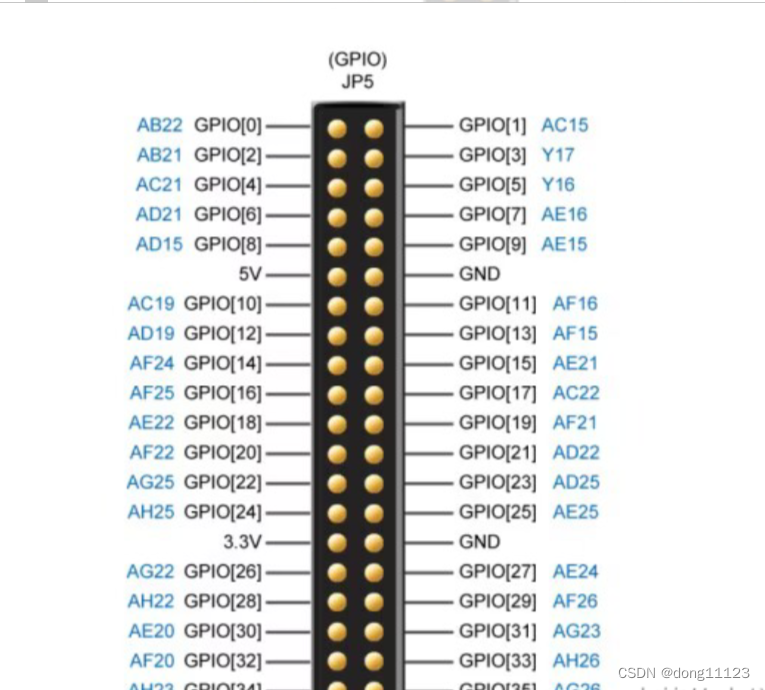
这里要求超声波模块的正负极分别接入5V和GND,其余trigger和echo自由接线,我这里使用的是GPIO[0]和GPIO[1]
设计文件
Trig.sv
module Trig(
input logic clk_us , //system clock 1MHz
input logic rst_n , //reset ,low valid
output logic trig //触发测距信号
);
//Parameter Declarations
parameter CYCLE_MAX = 19'd300_000;
//Interrnal wire/reg declarations
logic [18:00] cnt ; //Counter
logic add_cnt ; //Counter Enable
logic end_cnt ; //Counter Reset
//Logic Description
always @(posedge clk_us or negedge rst_n)begin
if(!rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= 'd0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt <= cnt;
end
end
assign add_cnt = 1'b1;
assign end_cnt = add_cnt && cnt >= CYCLE_MAX - 9'd1;
assign trig = cnt < 15 ? 1'b1 : 1'b0;
endmodule
clk_us.sv
module clk_us(
input logic clk , //system clock 50MHz
input logic rst_n , //reset ,low valid
output logic clk_us //
);
//Parameter Declarations
parameter CNT_MAX = 19'd50;//1us的计数值为 50 * Tclk(20ns)
//Interrnal wire/reg declarations
logic [5:00] cnt ; //Counter
logic add_cnt ; //Counter Enable
logic end_cnt ; //Counter Reset
//Logic Description
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= 'd0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt <= cnt;
end
end
assign add_cnt = 1'b1;
assign end_cnt = add_cnt && cnt >= CNT_MAX - 19'd1;
assign clk_us = end_cnt;
endmodule
Echo.sv
module Echo(
input logic clk , //clock 50MHz
input logic clk_us , //system clock 1MHz
input logic rst_n , //reset ,low valid
input logic echo , //
output logic [18:00] data_o //检测距离,保留3位小数,*1000实现
);
/* S(um) = 17 * t --> x.abc cm */
//Parameter Declarations
parameter T_MAX = 16'd60_000;//510cm 对应计数值
//Interrnal wire/reg declarations
logic r1_echo,r2_echo; //边沿检测
logic echo_pos,echo_neg; //
logic [15:00] cnt ; //Counter
logic add_cnt ; //Counter Enable
logic end_cnt ; //Counter Reset
logic [18:00] data_r ;
//Logic Description
//如果使用clk_us 检测边沿,延时2us,差值过大
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
r1_echo <= 1'b0;
r2_echo <= 1'b0;
end
else begin
r1_echo <= echo;
r2_echo <= r1_echo;
end
end
assign echo_pos = r1_echo & ~r2_echo;
assign echo_neg = ~r1_echo & r2_echo;
always @(posedge clk_us or negedge rst_n)begin
if(!rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= cnt;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin //echo 低电平 归零
cnt <= 'd0;
end
end
assign add_cnt = echo;
assign end_cnt = add_cnt && cnt >= T_MAX - 1; //超出最大测量范围则保持不变,极限
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
data_r <= 'd2;
end
else if(echo_neg)begin
data_r <= (cnt << 4) + cnt;
end
else begin
data_r <= data_r;
end
end //always end
assign data_o = data_r >> 1;
endmodule
seg.sv
module seg(
input logic clk ,
input logic rst_n ,
input logic [18:0] data_o ,
output logic [6:0] hex1 ,
output logic [6:0] hex2 ,
output logic [6:0] hex3 ,
output logic [6:0] hex4 ,
output logic [6:0] hex5 ,
output logic [6:0] hex6 ,
output logic [6:0] hex7 ,
output logic [6:0] hex8
);
parameter NOTION = 4'd10,
FUSHU = 4'd11;
parameter MAX20us = 10'd1000;
logic [9:0] cnt_20us;
logic [7:0] sel_r;
logic [3:0] number;
logic [6:0] seg_r;
logic [6:0] hex1_r;
logic [6:0] hex2_r;
logic [6:0] hex3_r;
logic [6:0] hex4_r;
logic [6:0] hex5_r;
logic [6:0] hex6_r;
logic [6:0] hex7_r;
logic [6:0] hex8_r;
//20微妙计数器
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
cnt_20us <= 10'd0;
end
else if (cnt_20us == MAX20us - 1'd1) begin
cnt_20us <= 10'd0;
end
else begin
cnt_20us <= cnt_20us + 1'd1;
end
end
//单个信号sel_r位拼接约束
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
sel_r <= 8'b11_11_11_10;
end
else if (cnt_20us == MAX20us - 1'd1) begin
sel_r <= {sel_r[6:0],sel_r[7]};
end
else begin
sel_r <= sel_r;
end
end
/*拿到数字*/
always @(*) begin
case (sel_r)
8'b11_11_11_10: number = NOTION ;
8'b11_11_11_01: number = data_o/10_0000 ;
8'b11_11_10_11: number = (data_o%10_0000)/1_0000 ;
8'b11_11_01_11: number = ((data_o%10_0000)%1_0000)/1000 ;
8'b11_10_11_11: number = FUSHU ;
8'b11_01_11_11: number = (((data_o%10_0000)%1_0000)%1000)/100 ;
8'b10_11_11_11: number = ((((data_o%10_0000)%1_0000)%1000)%100)/10 ;
8'b01_11_11_11: number = ((((data_o%10_0000)%1_0000)%1000)%100)%10 ;
default: number = 4'd0 ;
endcase
end
/*通过数字解析出seg值*/
always @(*) begin
case (number)
4'd0 : seg_r = 7'b100_0000;
4'd1 : seg_r = 7'b111_1001;
4'd2 : seg_r = 7'b010_0100;
4'd3 : seg_r = 7'b011_0000;
4'd4 : seg_r = 7'b001_1001;
4'd5 : seg_r = 7'b001_0010;
4'd6 : seg_r = 7'b000_0010;
4'd7 : seg_r = 7'b111_1000;
4'd8 : seg_r = 7'b000_0000;
4'd9 : seg_r = 7'b001_0000;
NOTION : seg_r = 7'b111_1111;
FUSHU : seg_r = 7'b011_1111;
default : seg_r = 7'b111_1111;
endcase
end
always @(*) begin
case (sel_r)
8'b11_11_11_10: hex1_r = seg_r;
8'b11_11_11_01: hex2_r = seg_r;
8'b11_11_10_11: hex3_r = seg_r;
8'b11_11_01_11: hex4_r = seg_r;
8'b11_10_11_11: hex5_r = seg_r;
8'b11_01_11_11: hex6_r = seg_r;
8'b10_11_11_11: hex7_r = seg_r;
8'b01_11_11_11: hex8_r = seg_r;
default: seg_r = seg_r;
endcase
end
assign hex1 = hex1_r;
assign hex2 = hex2_r;
assign hex3 = hex3_r;
assign hex4 = hex4_r;
assign hex5 = hex5_r;
assign hex6 = hex6_r;
assign hex7 = hex7_r;
assign hex8 = hex8_r;
endmodule
LED.sv
module LED(
input logic clk,
input logic rst_n,
input logic [18:0]dis,
output logic [3:0]led
);
logic [6:0]an;
logic [6:0]bn;
assign an=(dis%10_0000)/1_0000;
assign bn=((dis%10_0000)%1_0000)/1000 ;
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
led<=4'b0000;
end
else if((an*10+bn)<20&&(an*10+bn)>=10)begin
led<=4'b0001;
end
else if((an*10+bn)<10)begin
led<=4'b0011;
end
else if((an*10+bn)>20)begin
led<=4'b0111;
end
else begin
led<=4'b1111;
end
end
endmoduletop.sv
module top (
input logic clk ,
input logic rst_n ,
input logic echo ,
output logic [3:0]led,
output logic trig ,
output logic [6:0] hex1 ,
output logic [6:0] hex2 ,
output logic [6:0] hex3 ,
output logic [6:0] hex4 ,
output logic [6:0] hex5 ,
output logic [6:0] hex6 ,
output logic [6:0] hex7 ,
output logic [6:0] hex8
);
wire [18:0] data_o;
Trig inster_Trig(
.clk_us (clk_us ), //system clock 1MHz
.rst_n (rst_n ), //reset ,low valid
.trig (trig ) //触发测距信号
);
clk_us insert_clk_us(
.clk (clk ),
.rst_n (rst_n),
.clk_us (clk_us)
);
Echo inster_Echo(
.clk (clk ),
.clk_us (clk_us ),
.rst_n (rst_n ),
.echo (echo ),
.data_o (data_o )
);
LED inster_LED(
.clk (clk ) ,
.rst_n (rst_n) ,
.dis (data_o ) ,
.led (led )
);
seg inster_seg(
.clk (clk ) ,
.rst_n (rst_n ) ,
.data_o (data_o) ,
.hex1 (hex1) ,
.hex2 (hex2) ,
.hex3 (hex3) ,
.hex4 (hex4) ,
.hex5 (hex5 ) ,
.hex6 (hex6 ) ,
.hex7 (hex7 ) ,
.hex8 (hex8 )
);
endmodule上板
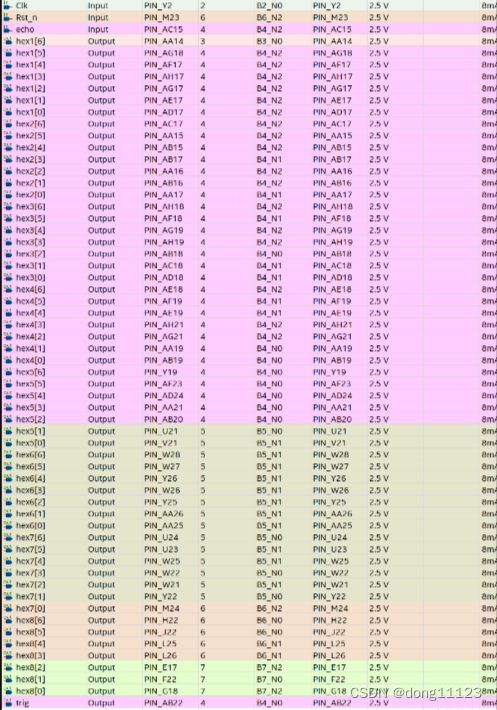
首先这里提出引脚配置,其中trig和echo引脚与自己所接线的位置向同即可
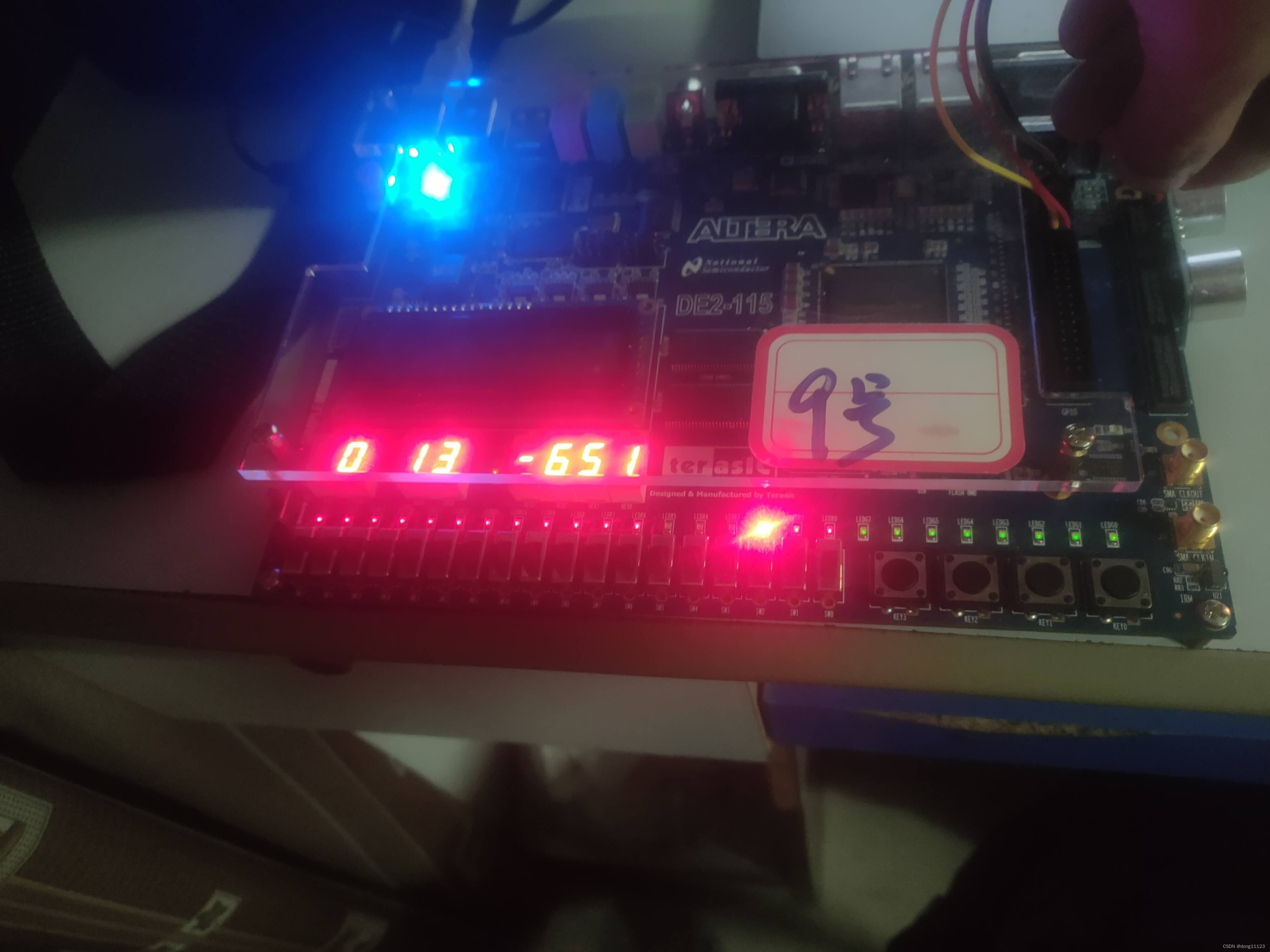
可见所测距离与实际距离一致,可见功能基本实现。
当所测距离小于10cm时,亮两个led灯,当距离大于20cm时亮3个led灯,当距离大于10小于20cm时,亮一个led灯。
总结
本次实验借用了一些学长的代码,也带有自己的一些思考,补全了学长没有写进代码的部分。能够自己补全一部分代码,对于我来说还是很有成就感的,同时熟悉了System-Verilog语法。















 789
789

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









