






目录
Anaconda安装
Linux ARM架构下安装anaconda - 缘随风烬 - 博客园 (cnblogs.com)
Linux ARM架构下安装anaconda - 缘随风烬 - 博客园
python2 到python3
按照Anaconda默认的配置,打开一个新的终端会自动进入Anaconda的环境:

如果不想直接进入Anaconda的环境,博主的做法是在~/.bashrc中添加一句,
conda deactivate这样打开一个新的终端就是系统原始的Python环境:

要再进入Anaconda环境就运行$ 。
conda activate比较难装的一些库
参考:https://blog.csdn.net/gxf_1999/article/details/118224182
pytorch安装
首先需要安装pip3
sudo apt-get install python3-pip然后安装依赖
1、
sudo apt-get install libopenblas-base libopenmpi-dev
2、
sudo pip3 install mpi4py(可能会出错,出错重试就行)
3、
pip3 install Cython
4、
pip3 install numpy
5、
pip3 install numpy torch-1.6.0-cp36-cp36m-linux_aarch64.whl测试
import numpy
若报错,在bashrc中加入:export OPENBLAS_CORETYPE=ARMV8
import torch
torch.__version__安装torchvision 0.7.0
pytorch1.6.0对应的torchvision版本为0.7.0(具体的对应版本去官网查询)
git clone -b v0.7.0 https://github.com/pytorch/vision
(当连接不上github网站时采用以下链接)
git clone --branch v0.7.0 https://gitee.com/zero-one-game/vision torchvisioncd torchvision以下步骤时间会有点长,也可能会卡死,耐心等待
sudo python3 setup.py install人脸摔倒代码相关
参考:▼OpenCV-Python操作UBS摄像头“pipeline”_嵌入式修行僧的博客-CSDN博客
OpenCV-Python设置UBS摄像头分辨率
cap.set(cv.CAP_PROP_FRAME_HEIGHT,240)
cap.set(cv.CAP_PROP_FRAME_WIDTH,320)摄像头(本地外接)
打开摄像头可能出错
红色框两句任选一句
#self.cap = cv2.VideoCapture(0, cv2.CAP_DSHOW)
self.cap = cv2.VideoCapture(0)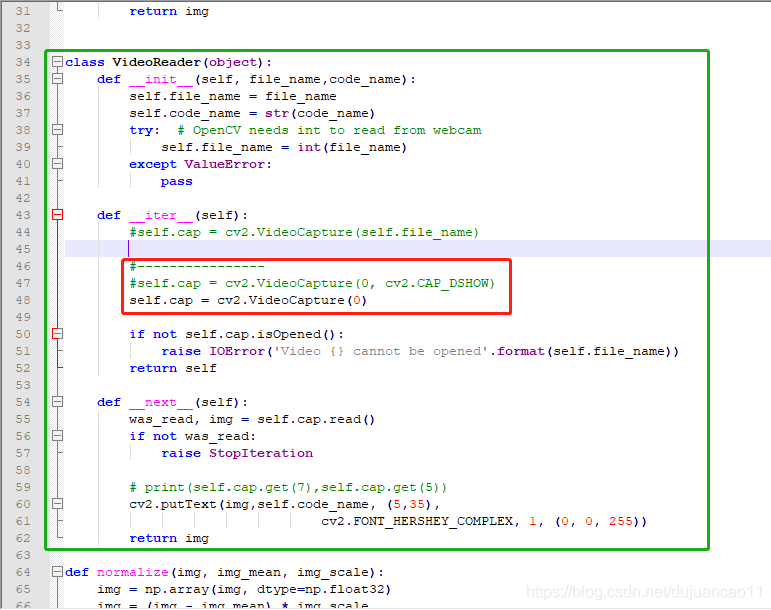
python使用SIM800C发送英文短信
python使用SIM800C发送英文短信_dujuancao11的博客-CSDN博客
传感器相关:
nano安装包已经在U盘了

有关nano安装Arduino_dujuancao11的博客-CSDN博客
Arduino温湿度、光照、二氧化碳融合_dujuancao11的博客-CSDN博客
 http://wiki.ros.org/rosserial_arduino/Tutorials/CMake
http://wiki.ros.org/rosserial_arduino/Tutorials/CMake问题:
[1629636783.546019]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
解决
sudo apt-get install ros-melodic-rosserial-python
sudo apt-get install ros-melodic-rosserial-arduino小米电器
python控制小米电器以及ros通讯控制小米电器_dujuancao11的博客-CSDN博客
linux查找正在运行的py程序,并关闭
linux查找正在运行的py程序,并关闭_dujuancao11的博客-CSDN博客
烧好系统后检查磁盘
烧好系统后检查磁盘_dujuancao11的博客-CSDN博客
cmake方式不需要装Arduino
但是需要更改一些,赋予权限
sudo usermod -a -G tty xtark
sudo usermod -a -G dialout xtark
sudo chmod a+rw /dev/ttyACM0备份
win 傲梅轻松备份免费版
其他
rosdep update解决方案
rosdep update解决方案(time out),两种方法完美解决,亲测有效_Y.W.jian的博客-CSDN博客
温湿度传感器dht11(arduino实现)、以及ros和arduino通信_dujuancao11的博客-CSDN博客
光照传感器bh1750(arduino实现)、以及ros和arduino通信_dujuancao11的博客-CSDN博客
二氧化碳传感器ccs811(arduino实现)、以及ros和arduino通信_dujuancao11的博客-CSDN博客




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











