






matlab/simulink一阶倒立摆仿真,二阶倒立摆 pid 模糊pid 最优控制 LQE控制 神经网络 运行结果如图
ID:479666838351981
暖了xia天蓝了海
标题:基于MATLAB Simulink的倒立摆仿真及控制算法优化
摘要:本文基于MATLAB Simulink平台,以倒立摆为例,探讨了一阶和二阶倒立摆的仿真模型,并分别针对PID控制、模糊PID控制、最优控制、LQE控制和神经网络控制等算法进行了分析和优化。通过对比运行结果,评估了各种控制算法在倒立摆系统中的性能与稳定性。
第一节:简介
倒立摆作为一种经典的控制系统,在机器人领域广泛应用。本节将介绍倒立摆的定义、应用场景以及研究意义,并概述本文将要讨论的控制算法。
第二节:一阶倒立摆仿真
本节基于MATLAB Simulink平台,建立了一阶倒立摆的仿真模型,并以PID控制算法为例,展开了对该系统的控制分析。从传统PID控制的原理出发,详细讨论了参数调整和系统稳定性的问题,并通过仿真结果验证了PID控制算法在一阶倒立摆系统中的有效性。
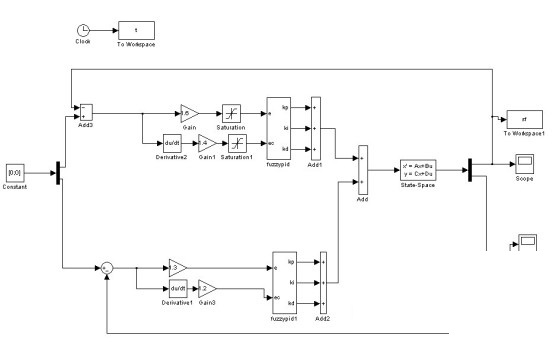
第三节:二阶倒立摆仿真
本节扩展了仿真模型,构建了二阶倒立摆的仿真模型,并对模糊PID控制、最优控制、LQE控制和神经网络控制等算法进行了分析和优化。通过对比不同控制算法的运行结果,评估了其在二阶倒立摆系统中的性能和稳定性,以及在不同工况下的适用性。
第四节:实验结果与分析
在本节中,我们展示了各种控制算法在一阶和二阶倒立摆系统中的实验结果,并对比了它们的性能差异。进一步分析了各种控制算法在不同工况下的优劣,并提出了针对倒立摆系统的控制算法选择策略。
第五节:总结与展望
本文通过对MATLAB Simulink平台上一阶和二阶倒立摆的仿真与控制算法优化进行了研究,探讨了PID控制、模糊PID控制、最优控制、LQE控制和神经网络控制等算法的应用
相关的代码,程序地址如下:http://nodep.cn/666838351981.html


















 677
677

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









