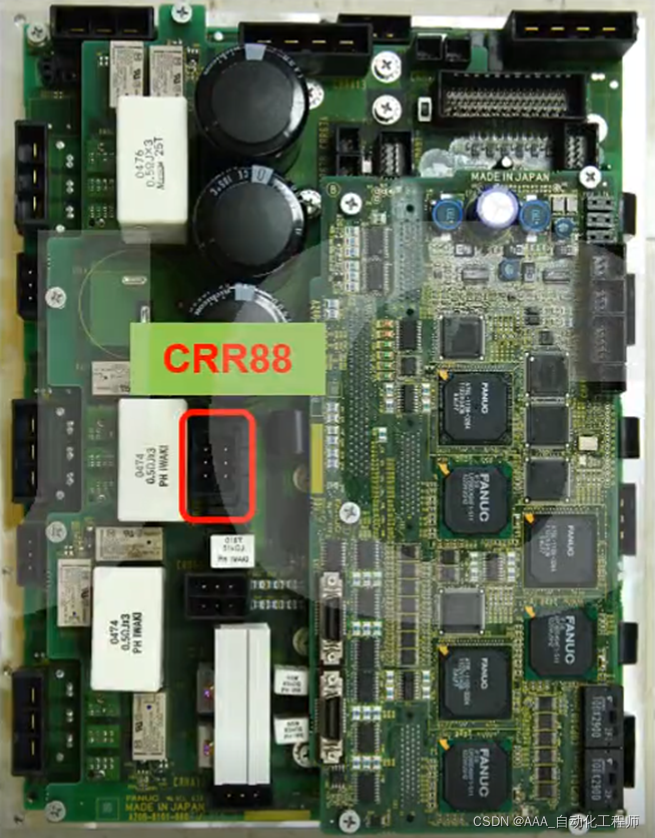
FANUC机器人SRVO-018故障报警诊断及处理对策 SRVO-018 制动器异常(G:i A:j) 原因:制动器电流过大 处理对策: 可能是由于机器人连接电缆的短路导致。 具体可参考以下分析: 确认6轴伺服放大器上的抱闸接口CRR88,如下图所示, 检查该接口连接的电缆、制动器电缆等是否有接地、破损或短路等异常情况 可以这样操作来进行简单的判断: 首先将机器人控制柜关机,然后将CRR88这个接口的连接头拔下,控制柜重新开机上电,待控制柜伺服上电之后,点动机器人, 如果点动机器人之后,


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文介绍了FANUC机器人出现SRVO-018制动器异常故障的诊断过程。故障可能由机器人连接电缆短路引起,通过检查伺服放大器的CRR88接口及附加轴的CRR65接口的电缆和制动器状态来判断问题所在。如果在断开CRR88接口后仍报警,可能是伺服放大器故障;反之,则为电缆问题。
本文介绍了FANUC机器人出现SRVO-018制动器异常故障的诊断过程。故障可能由机器人连接电缆短路引起,通过检查伺服放大器的CRR88接口及附加轴的CRR65接口的电缆和制动器状态来判断问题所在。如果在断开CRR88接口后仍报警,可能是伺服放大器故障;反之,则为电缆问题。



 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1万+
1万+







