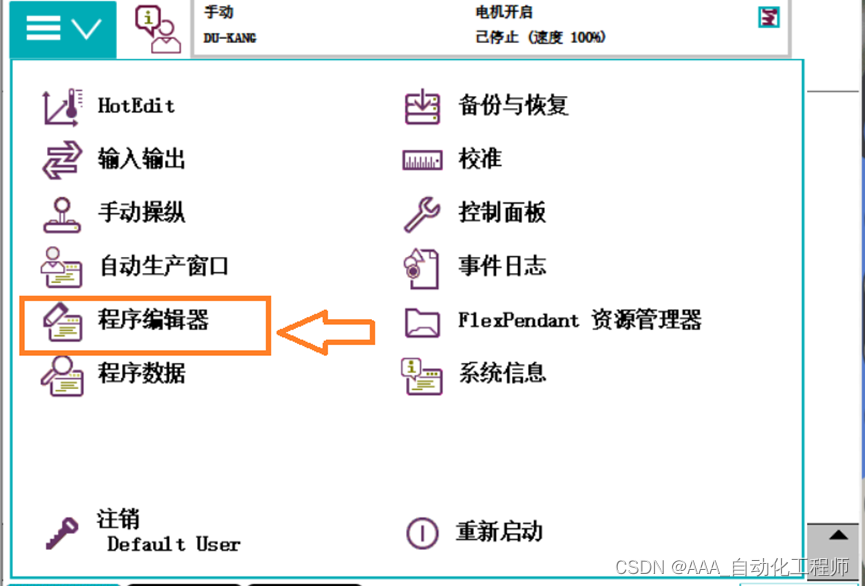
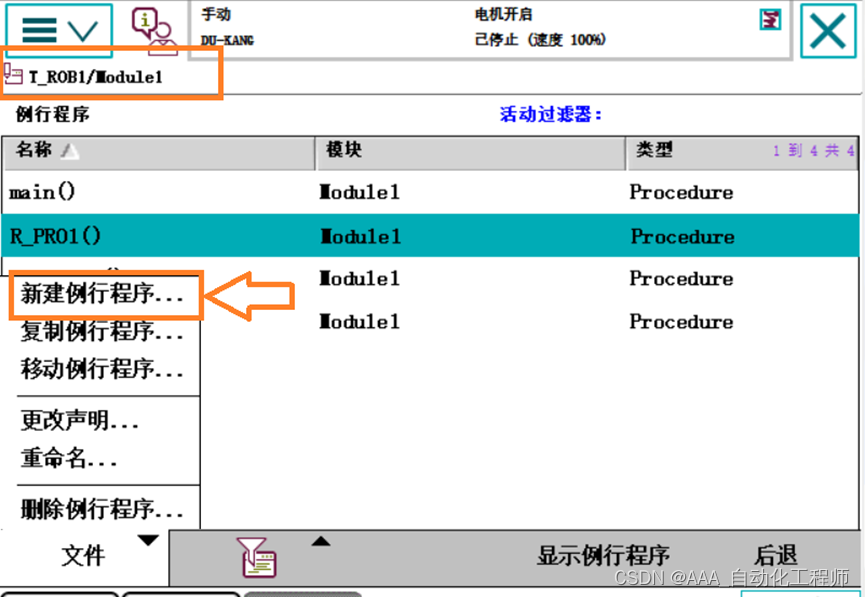
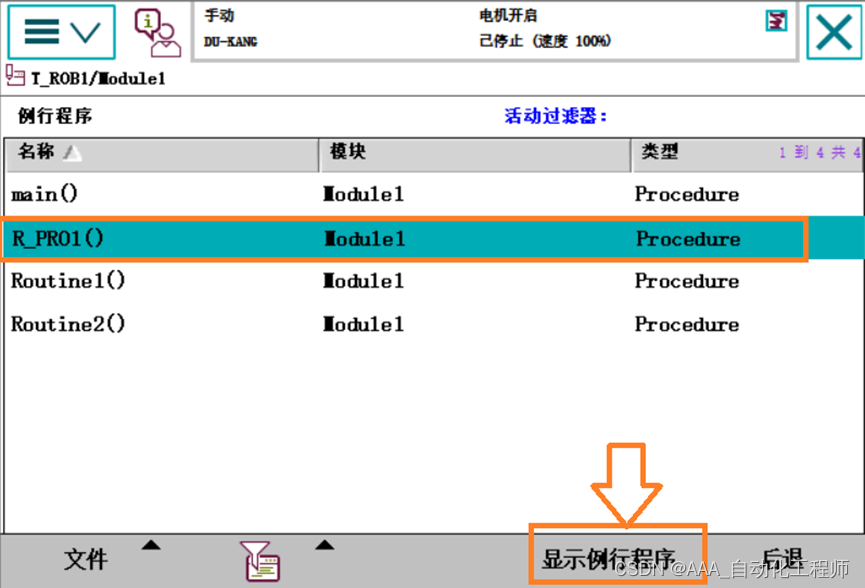
ABB机器人编程基础_手动示教+记录+修改点位数据的具体方法和步骤示例 如下图所示,打开示教器,控制柜切换到手动模式,电机上电,找到程序编辑器,点击进入, 如下图所示,点击进入例行程序,点击左下角的文件—新建例行程序, 如下图所示,新建一个名称为R_PRO1的例行程序,然后点击显示例行程序, 如下图所示,进入例行程序R_PRO1,


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文介绍了ABB机器人编程的基础知识,包括如何手动示教机器人到达目标位置,记录并修改点位数据。通过示教器进入例行程序,新建指令如MoveJ,并详细讲解了设置目标点坐标、速度、转弯半径和工具坐标系的过程。此外,还展示了如何编辑已用数据类型,如robtarget和speeddata,以便调整位置和速度参数。
本文介绍了ABB机器人编程的基础知识,包括如何手动示教机器人到达目标位置,记录并修改点位数据。通过示教器进入例行程序,新建指令如MoveJ,并详细讲解了设置目标点坐标、速度、转弯半径和工具坐标系的过程。此外,还展示了如何编辑已用数据类型,如robtarget和speeddata,以便调整位置和速度参数。


 订阅专栏 解锁全文
订阅专栏 解锁全文



















 3975
3975







