







目录
ABB Robot Studio是一个强大的机器人仿真和编程工具,它允许用户在虚拟环境中设计、测试和优化机器人工作单元。该软件拥有一个丰富的模型库,包含了ABB公司推出的各种工业机器人型号。
平移:按住左Ctrl键+鼠标左键
旋转:按住左Ctrl键+Shift键+鼠标左键
项目大致流程
创建工作站▶模型导入(组件安装)▶创建机器人系统▶设备信息修改(夹角型号、速度)▶控制器(虚拟示教器)▶编辑程序(手动模式、添加指令)▶位置修改(路径设定)▶调试仿真▶数据导出▶结果分析
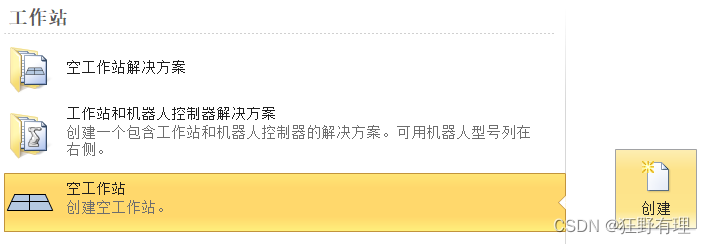
第1章 创建工作站
1.1 空工作站
第2章 模型导入和组件安装
2.1 机器人模型和设备模型
1、机器人模型(根据需要导入)

图B1
2、设备模型(根据需要导入)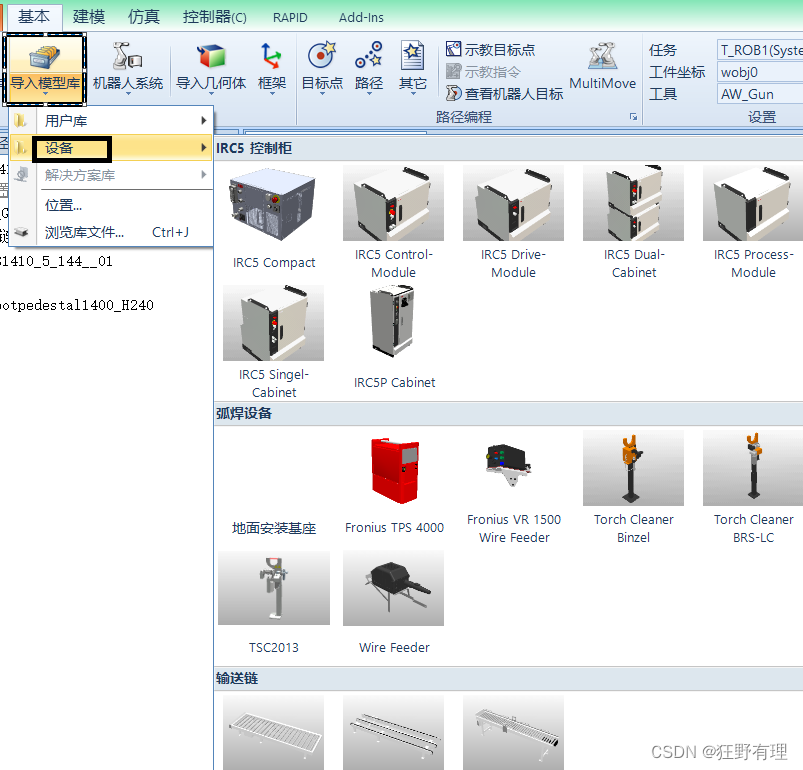
图B2
3、常用组件栏
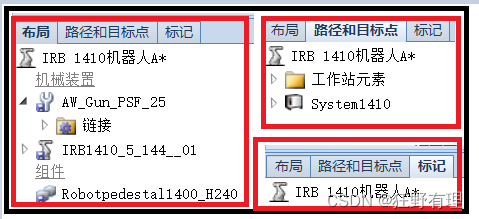
图B3

图B4 安装示例
第3章 创建机器人系统
3.1 系统创建和信息设置
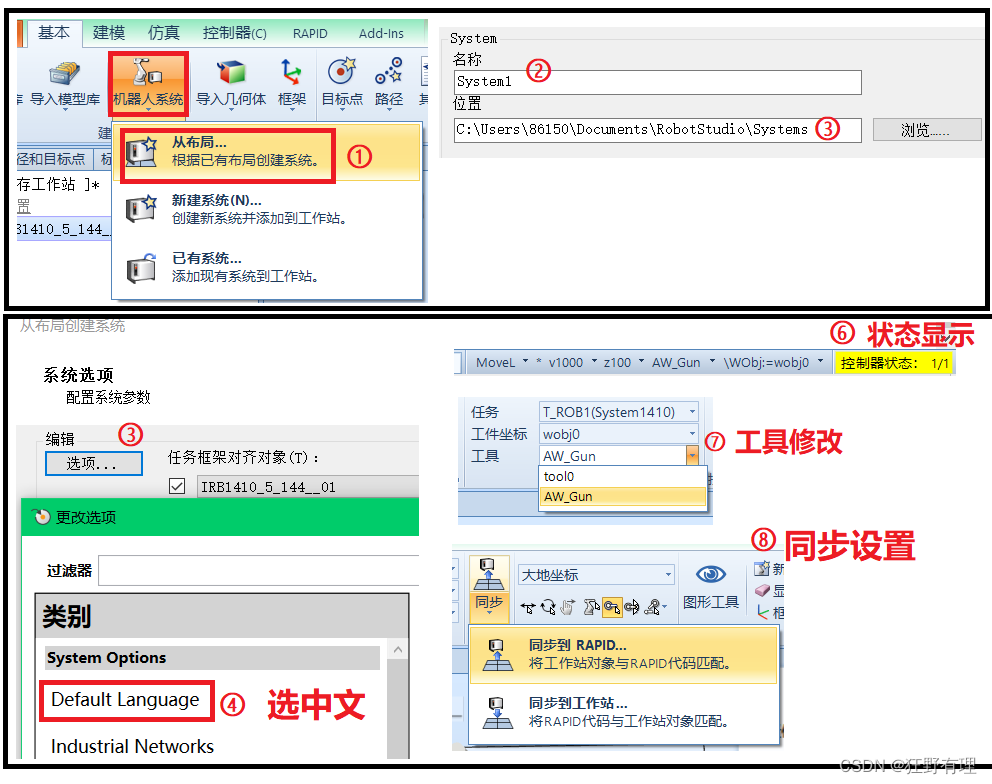
图C1
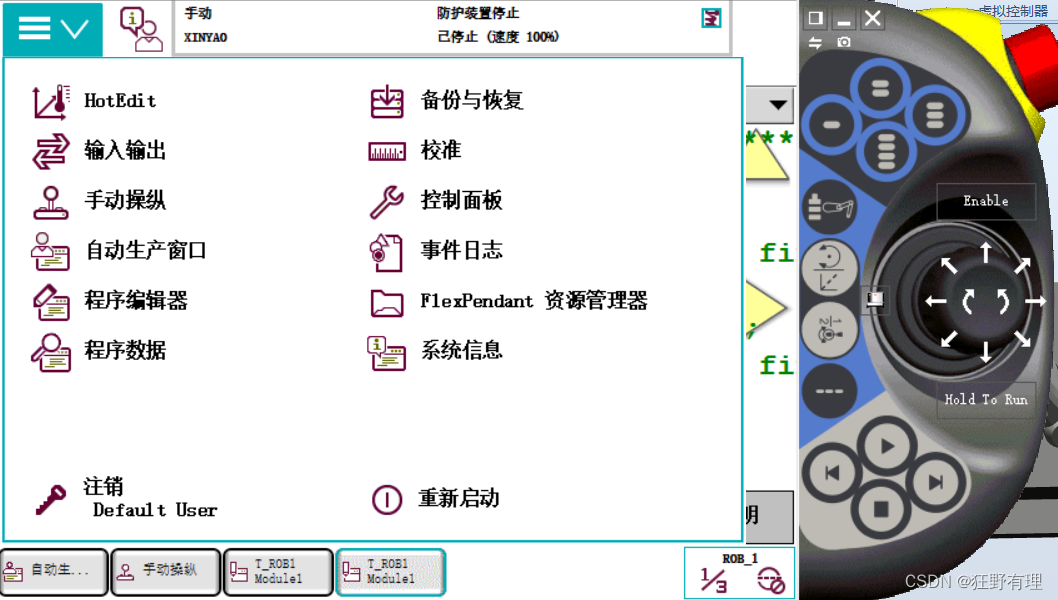
第4章 虚拟示教器
4.1 示教器界面
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1463
1463

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









