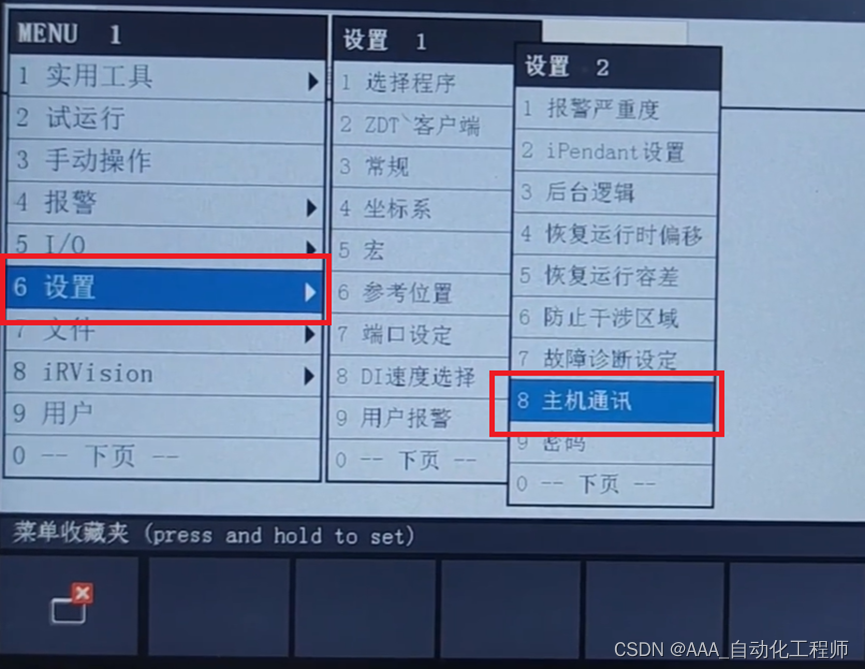
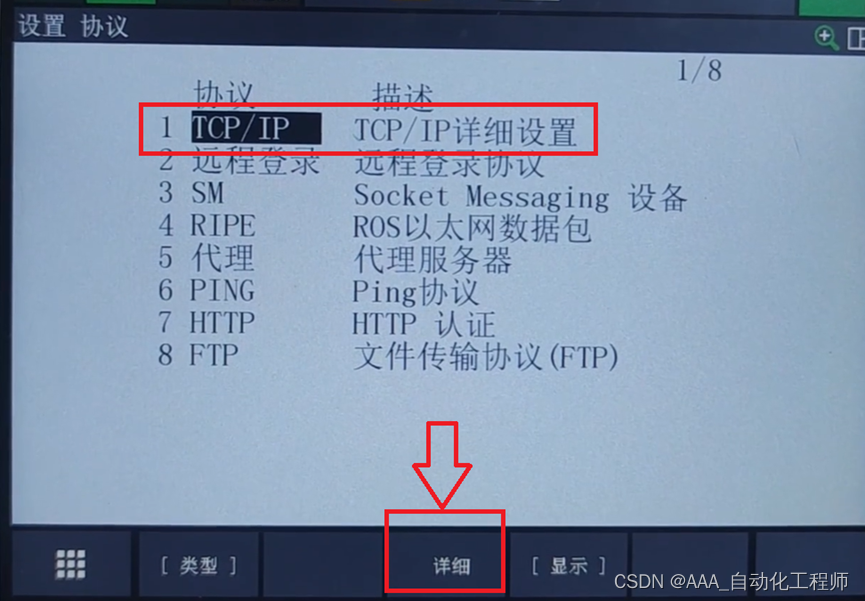
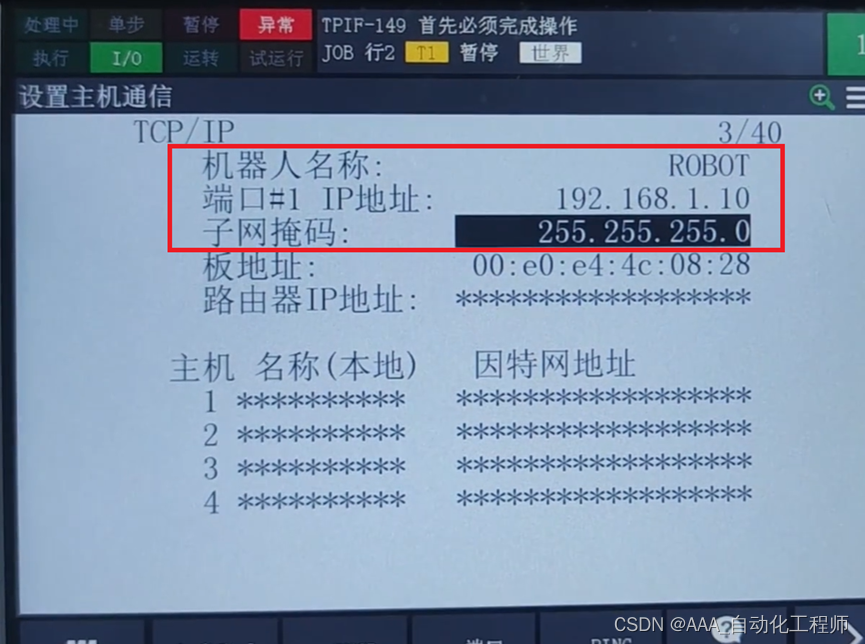
FANUC机器人MODBUS TCP通信配置方法(示教器实物演示) 机器人一侧的配置: 如下图所示,示教器上找到设置—主机通讯, 如下图所示,选择第一项TCP/IP,点击详细进入配置界面, 如下图所示,设置机器人端口1#的IP地址为192.168.1.10,子网掩码:255.255.255.0 如下图所示ÿ


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文通过FANUC示教器实物演示,详细介绍了如何配置FANUC机器人进行MODBUS TCP通信,包括设置IP地址、解锁HTTP选项、配置Modbus TCP参数、数字输入输出分配以及在PLC中调用MB_CLIENT功能块进行通信测试,确保通信正常建立。
本文通过FANUC示教器实物演示,详细介绍了如何配置FANUC机器人进行MODBUS TCP通信,包括设置IP地址、解锁HTTP选项、配置Modbus TCP参数、数字输入输出分配以及在PLC中调用MB_CLIENT功能块进行通信测试,确保通信正常建立。


 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1869
1869







