







1、概述
Modbus TCP 通讯是一种机器人与外围设备通讯的总线方式。在使用 Modbus TCP 通讯方式时,机器人只作为服务端,并且只能用来传 IO,若需要传输寄存器值可直接通过触摸屏功能,使用 TCP/IP 进行传输。作业流程:
2、 机器人软件设置
2.1 Modbus TCP 界面设置
Modbus TCP 界面设置,【MENU】--【IO】--【Modbus TCP】,如图所示:
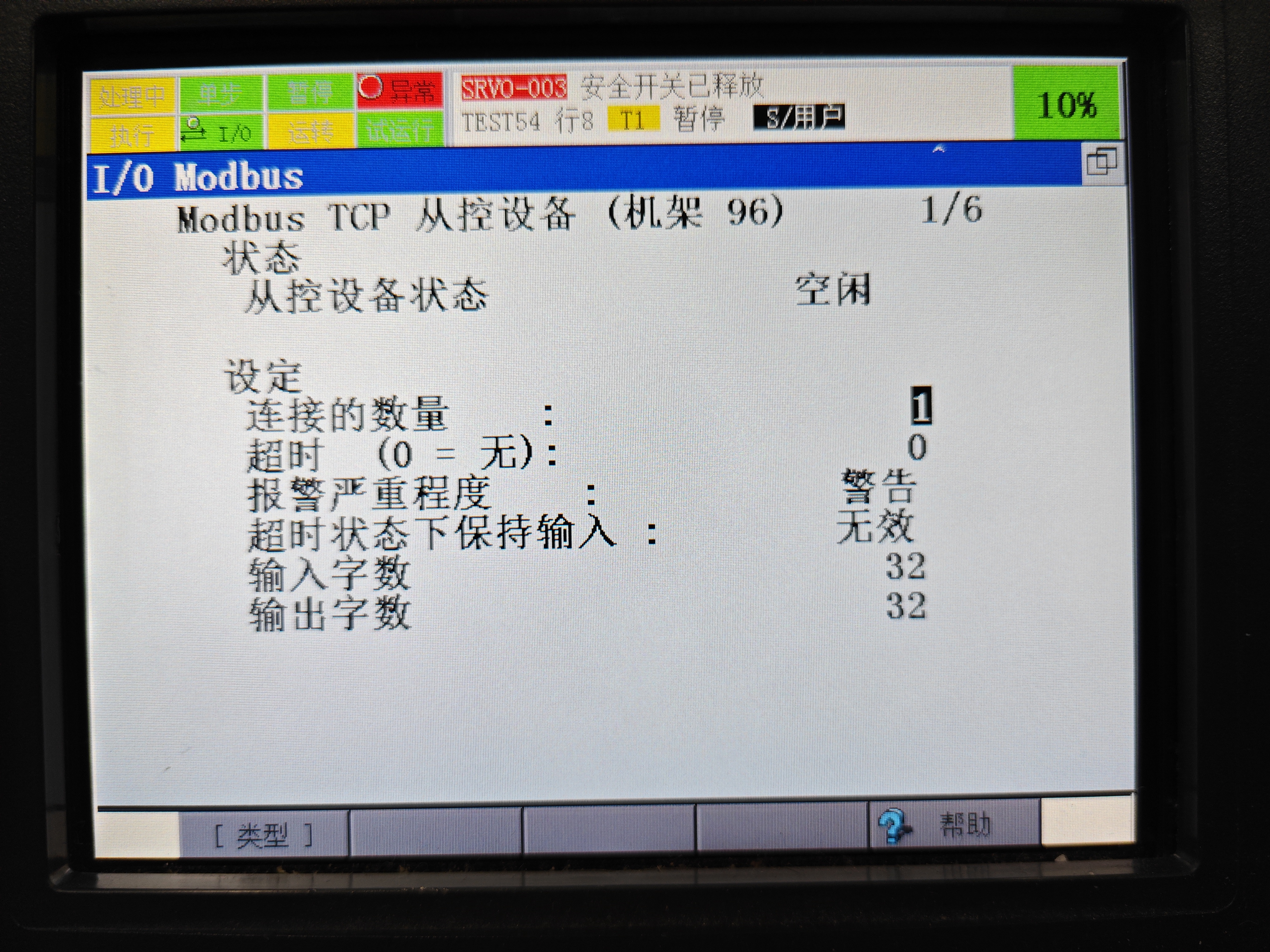
| 设备名称 | 设置说明(可修改项) |
| 从控设备状态 | 空闲/运行中(连接完成以后) |
| 连接数量 | 通常设置为 1,若设备有通讯报错或者有 PLC 下 挂多个设备可为 2 或者更大值 |
| 超时 | 若出现超时,可适当改大,一般不超过 5000 |
| 报警严重程度 | 停止/报警/中断(默认停止) |
| 超时状态下保持输入 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 3897
3897











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











