






基于模型预测控制的无人驾驶车辆轨迹跟踪问题研究,matlab 附有MATLAB程序与详细的建模过程,研究车辆转向的同学可以作为参考
ID:29300714502070317
技多不压身
基于模型预测控制的无人驾驶车辆轨迹跟踪问题研究
一、引言
随着科技的飞速发展,无人驾驶技术成为了当下研究的热点之一。在无人驾驶的实现过程中,车辆的轨迹跟踪问题尤为关键。本文将对基于模型预测控制的无人驾驶车辆轨迹跟踪问题进行研究,旨在深入探讨其内在机制,为相关领域的研究人员提供有价值的参考。
二、模型预测控制概述
模型预测控制(MPC)是一种先进的控制算法,它通过预测模型预测系统未来的动态行为,并在此基础上进行优化计算,生成最优控制序列。在无人驾驶车辆的轨迹跟踪问题中,MPC能够实现对车辆行驶状态的有效控制,确保车辆稳定、精确地跟踪期望轨迹。
三、基于模型预测控制的轨迹跟踪系统设计
本文将详细探讨基于模型预测控制的轨迹跟踪系统设计过程。系统设计主要包括以下几个环节:
- 构建车辆模型:建立车辆的动态模型,为MPC控制器提供准确的数据基础。
- 设计预测模型:根据车辆模型,设计预测模型,以预测车辆未来的动态行为。
- 制定优化目标:根据轨迹跟踪的需求,制定优化目标,如最小化跟踪误差、最大化稳定性等。
- 实现MPC控制器:基于预测模型和优化目标,实现MPC控制器,生成控制序列。
四、MATLAB程序实现与建模过程详解
MATLAB作为一种强大的数学计算软件,在无人驾驶车辆的轨迹跟踪问题研究中发挥着重要作用。本文将详细阐述如何使用MATLAB进行建模与程序实现。建模过程主要包括以下几个步骤:
- 环境搭建:安装MATLAB软件及相关工具箱,为编程和计算提供基础环境。
- 车辆模型建立:利用MATLAB/Simulink等工具建立车辆模型,模拟车辆的动态行为。
- 预测模型设计:基于车辆模型,设计预测模型,实现对未来行为的预测。
- MPC控制器实现:利用MATLAB编写MPC控制器代码,生成控制序列。在此过程中,我们将充分考虑车辆的转向问题,确保控制器的实用性和有效性。
五、研究结果与分析
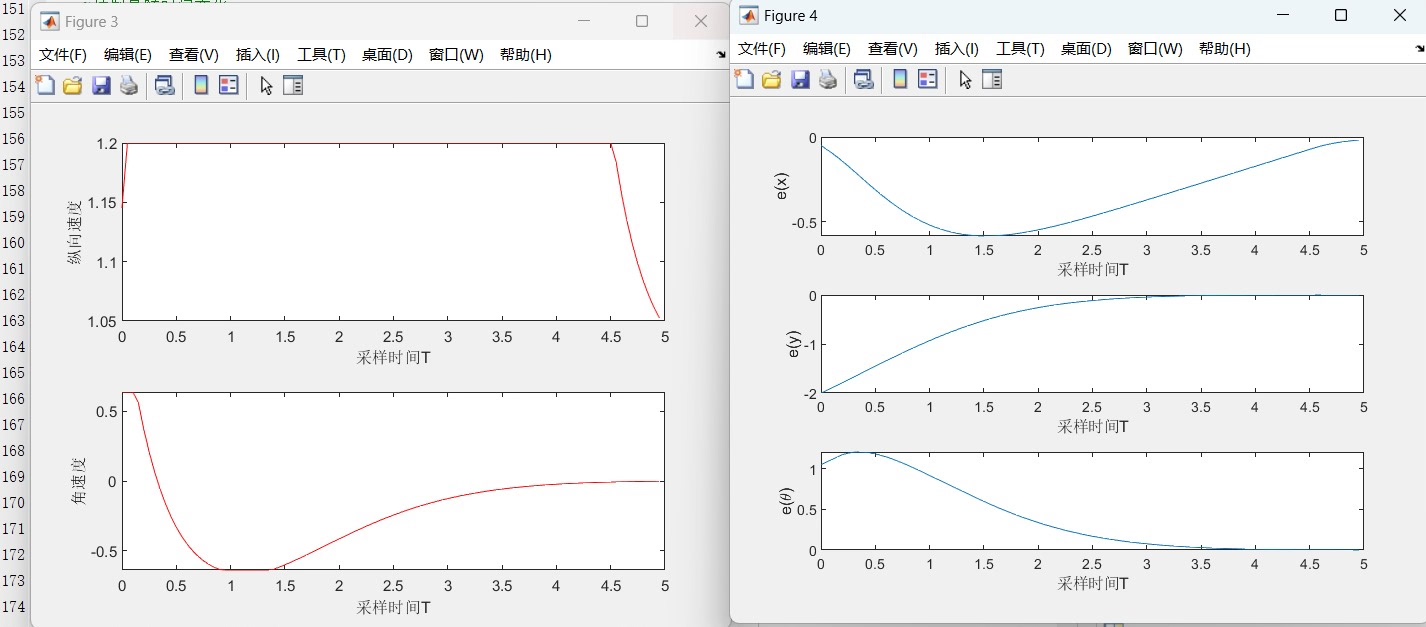
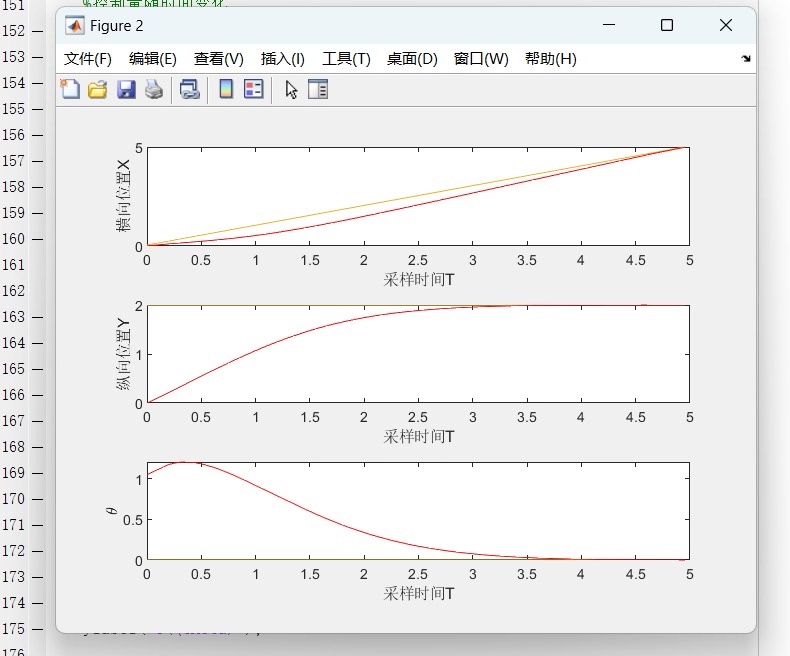
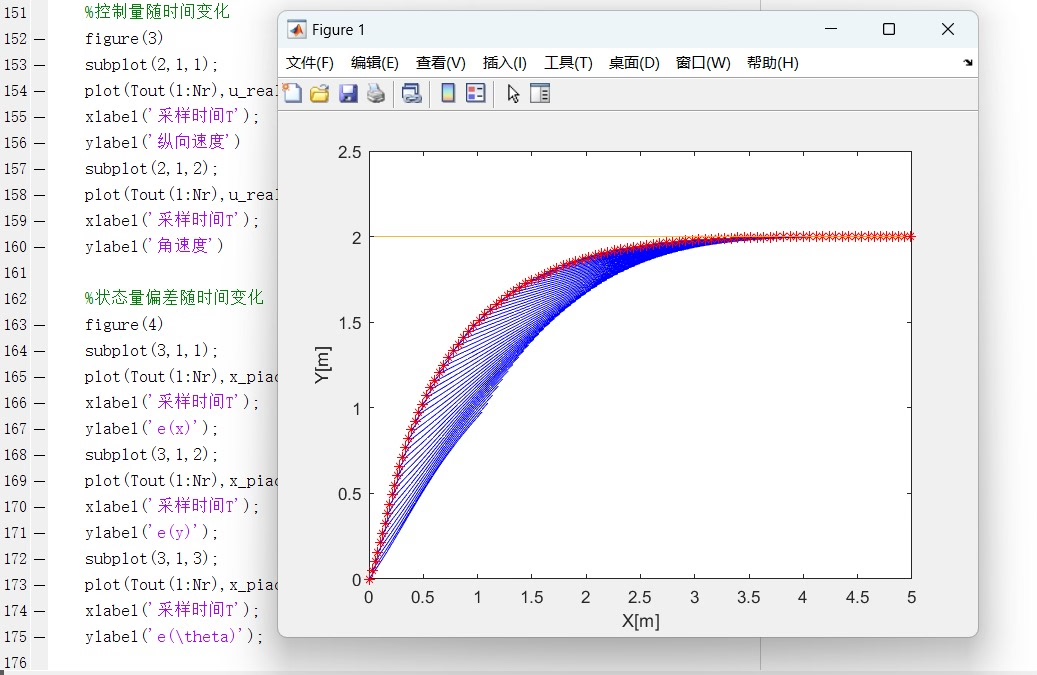
本文将通过实际案例,展示基于模型预测控制的无人驾驶车辆轨迹跟踪系统的实际效果。通过对实验结果进行分析,验证系统的性能表现,并探讨其在实际应用中的潜力和挑战。
六、结论与展望
本文研究了基于模型预测控制的无人驾驶车辆轨迹跟踪问题,详细阐述了系统设计过程、MATLAB程序实现与建模过程。通过对实验结果的分析,验证了系统的有效性。未来,我们将进一步研究如何提高系统的鲁棒性和实时性,为无人驾驶技术的发展贡献力量。
七、参考文献
本文在撰写过程中参考了国内外相关领域的最新研究成果和文献。具体参考文献将在文章末尾给出。
八、总结回顾与感悟分享(注:这部分字数根据实际情况进行适当增减)通过对本次研究的总结回顾与感悟分享环节强调研究成果的价值以及对相关领域的影响作为技术博客文章的结尾为读者留下深刻印象本文梳理了基于模型预测控制的无人驾驶车辆轨迹跟踪问题的研究过程分享了MATLAB程序实现与建模过程的细节分析了实验结果展望了未来研究方向希望本文能为研究无人驾驶技术的同学提供一定的参考和帮助共同推动无人驾驶技术的发展进步总的来说本次研究的成功得益于持续的努力深入的思考以及不断的学习在未来的工作中我们将继续致力于提高无人驾驶技术的性能推动其在实际应用中的落地让我们共同期待无人驾驶技术的美好未来吧
具体的代码,程序如下地址:http://wekup.cn/714502070317.html
















 844
844

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









