






MATLAB四旋翼仿真 滑模控制 simulink
三种控制方法 有公式和文献参考
1.滑模SMC
2.反步控制 backsteping control
3.pid控制
ID:1329668605618037
爱小马的海盐大傻
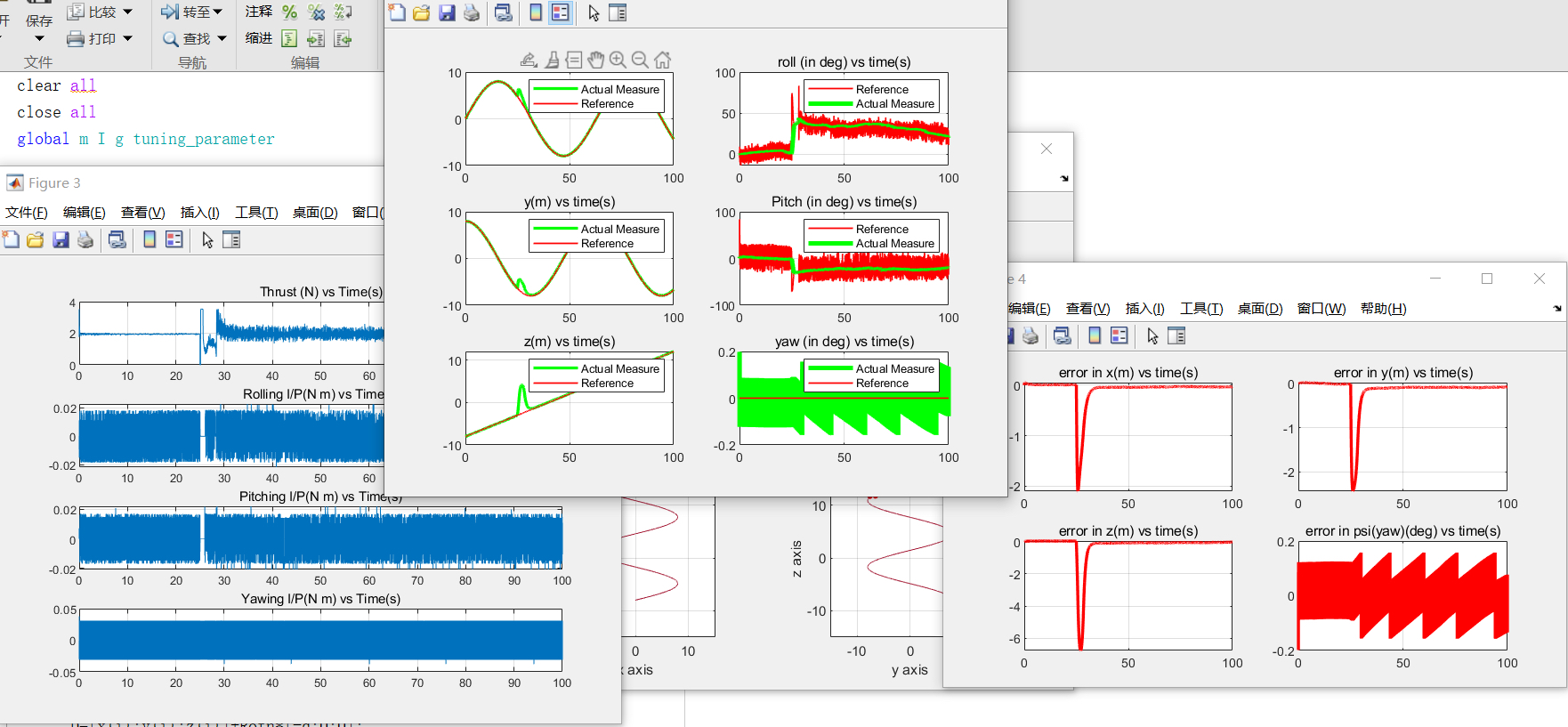
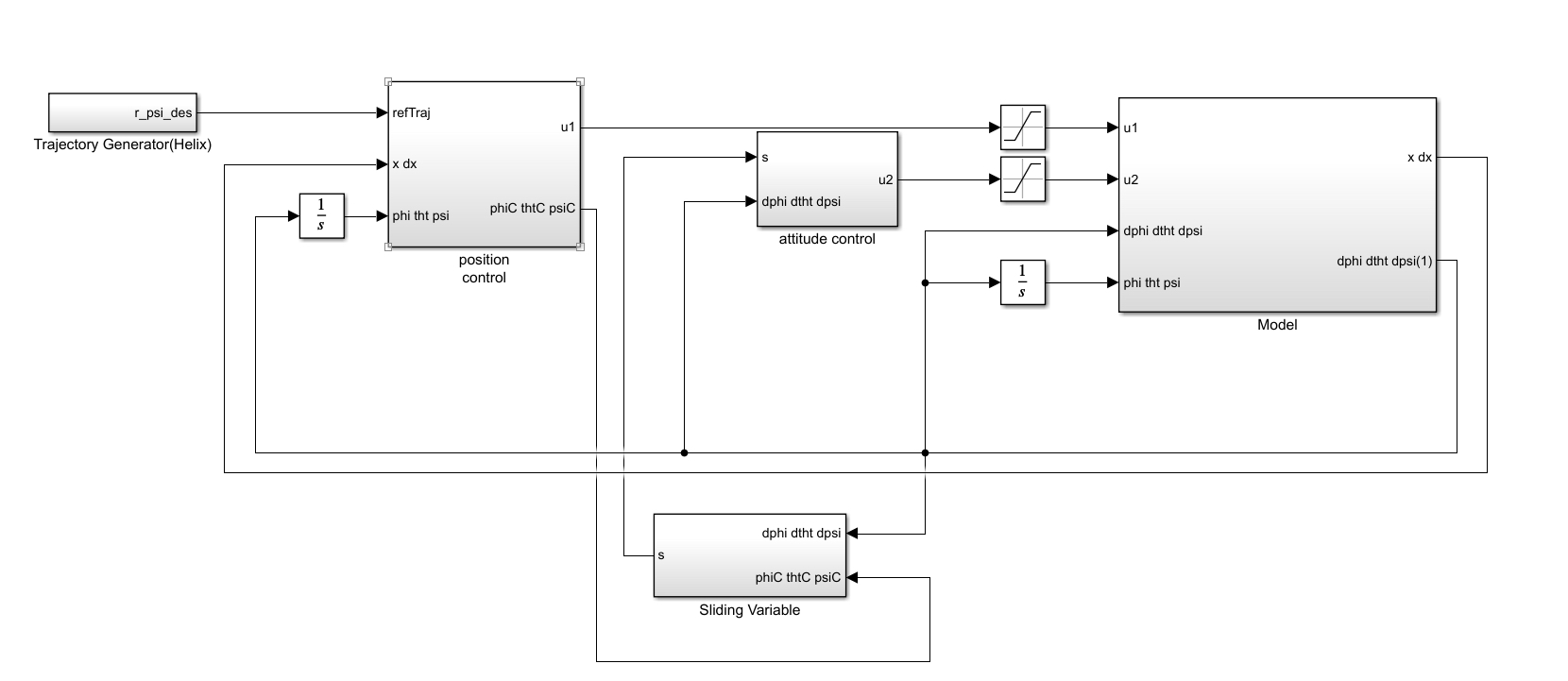
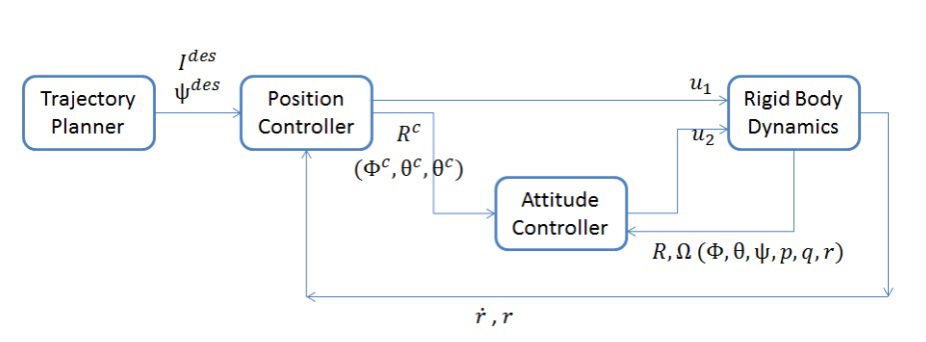
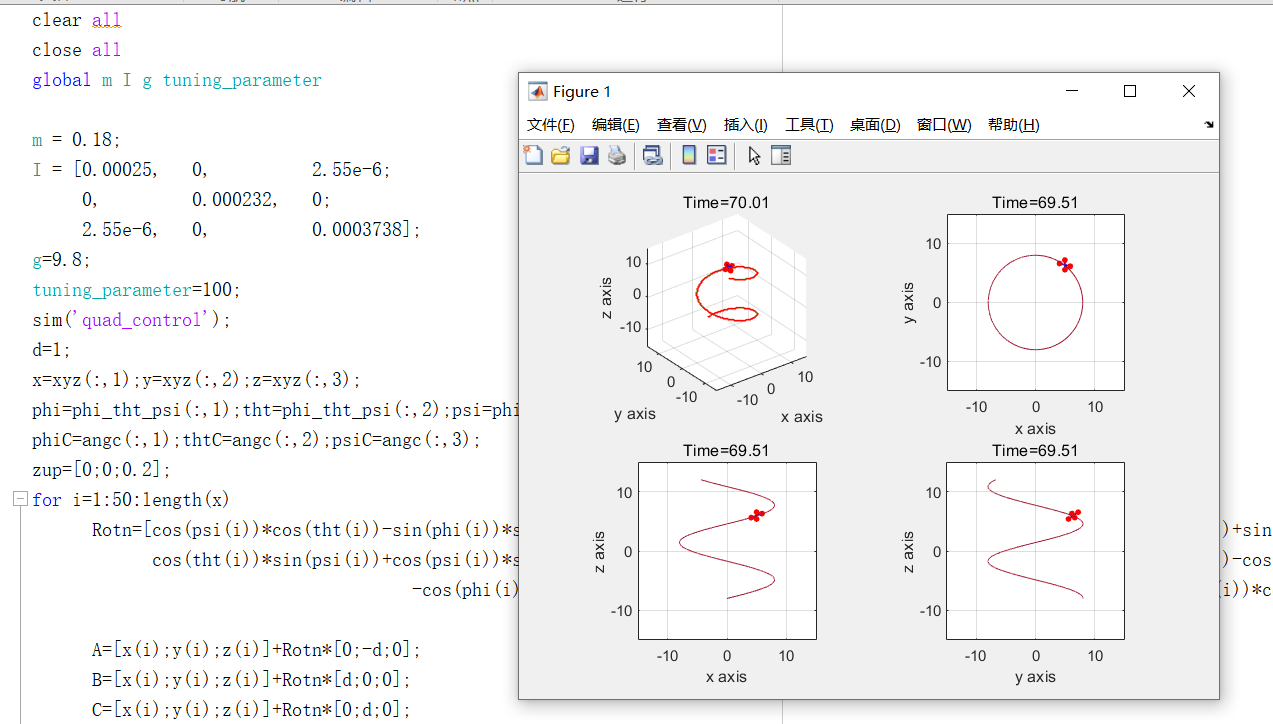
MATLAB四旋翼仿真是一种常见的技术应用,具有广泛的实际价值。在四旋翼仿真中,滑模控制(Sliding Mode Control,SMC)、反步控制(Backstepping Control)和PID控制是三种常见的控制方法,它们各自具有独特的优势和适用范围。在本文中,我们将对这三种控制方法进行详细的介绍和分析。
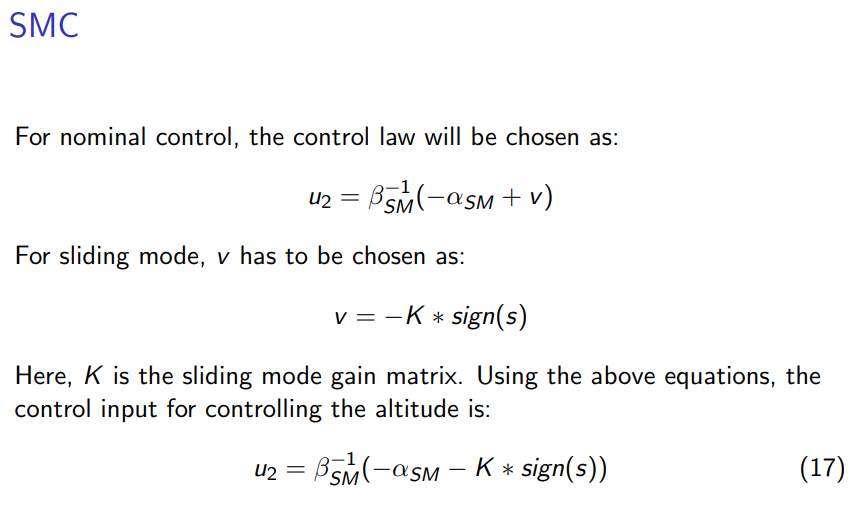
首先,滑模控制是一种基于非线性控制理论的控制方法,其核心思想是通过引入滑模面来实现对系统的控制。在滑模控制中,通过设计合适的滑模面,使得系统状态能够快速、准确地达到期望的状态。滑模控制具有鲁棒性强、响应速度快等优点,在四旋翼仿真中得到了广泛的应用。然而,滑模控制也存在一些问题,比如滑模面的设计和参数的选择需要一定的经验和技巧,而且在实际应用中存在抖动和冲击等问题。
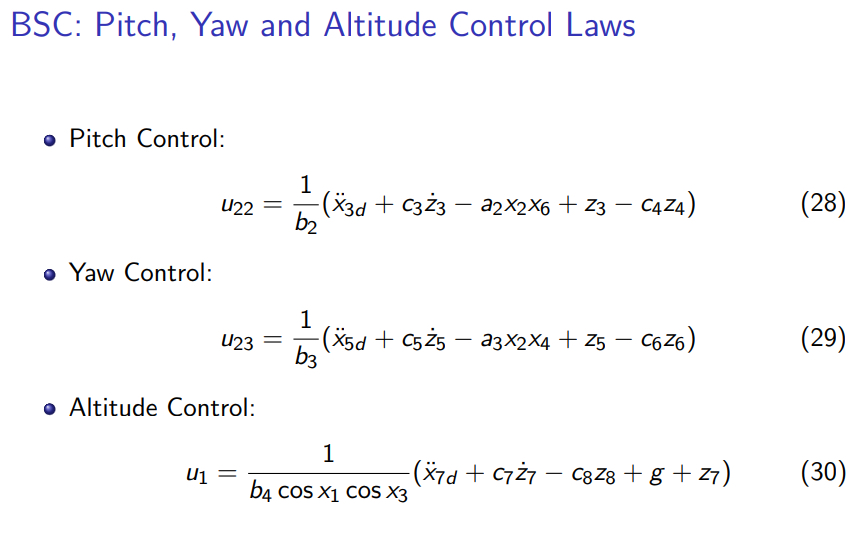
其次,反步控制是一种逐步设计控制器的方法,其核心思想是通过逐步迭代的方式设计控制器,使得系统能够按照期望的轨迹运动。在反步控制中,通过对系统的每个状态量进行逐步的控制设计,从而实现对整个系统的控制。反步控制具有结构简单、易于实现等优点,在四旋翼仿真中也得到了广泛的应用。然而,反步控制也存在一些问题,比如设计过程复杂、对系统的非线性特性要求较高等。
最后,PID控制是一种经典的控制方法,其核心思想是通过比例、积分和微分三个部分来调节控制器的输出。在PID控制中,通过对系统的误差进行反馈调节,从而实现对系统的控制。PID控制具有结构简单、参数调节方便等优点,在四旋翼仿真中也得到了广泛的应用。然而,PID控制也存在一些问题,比如对系统的非线性和时变性要求较高、调节参数的选择较为困难等。
综上所述,滑模控制、反步控制和PID控制是三种常见的控制方法,在MATLAB四旋翼仿真中都具有重要的应用价值。根据不同的需求和系统特性,可以选择合适的控制方法来实现对系统的控制。滑模控制具有鲁棒性强、响应速度快的特点,适用于对系统要求较高的情况;反步控制具有结构简单、易于实现的特点,适用于对系统非线性特性要求较高的情况;PID控制具有结构简单、参数调节方便的特点,适用于对系统要求较为宽松的情况。在实际应用中,需要根据具体情况综合考虑各种因素,选择合适的控制方法,并对其进行适当的调节和优化,以实现对系统的良好控制效果。
注:本文所述的滑模控制、反步控制和PID控制方法均来自相关的技术文献和公式,但本文不提供具体的参考文献和示例代码。如需进一步了解,请参考相关技术文献和资料。
相关的代码,程序地址如下:http://nodep.cn/668605618037.html
















 1103
1103

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









