







 本文档详细介绍了基于STM32的两轮平衡车项目,包括硬件设计(原理图与PCB)、软件编程(姿态解算、PID控制、电机驱动)以及调试与测试过程,帮助读者理解嵌入式系统开发与两轮平衡车控制原理。
本文档详细介绍了基于STM32的两轮平衡车项目,包括硬件设计(原理图与PCB)、软件编程(姿态解算、PID控制、电机驱动)以及调试与测试过程,帮助读者理解嵌入式系统开发与两轮平衡车控制原理。
stm32两轮平衡车项目资料
两轮平衡车原理图+PCB+程序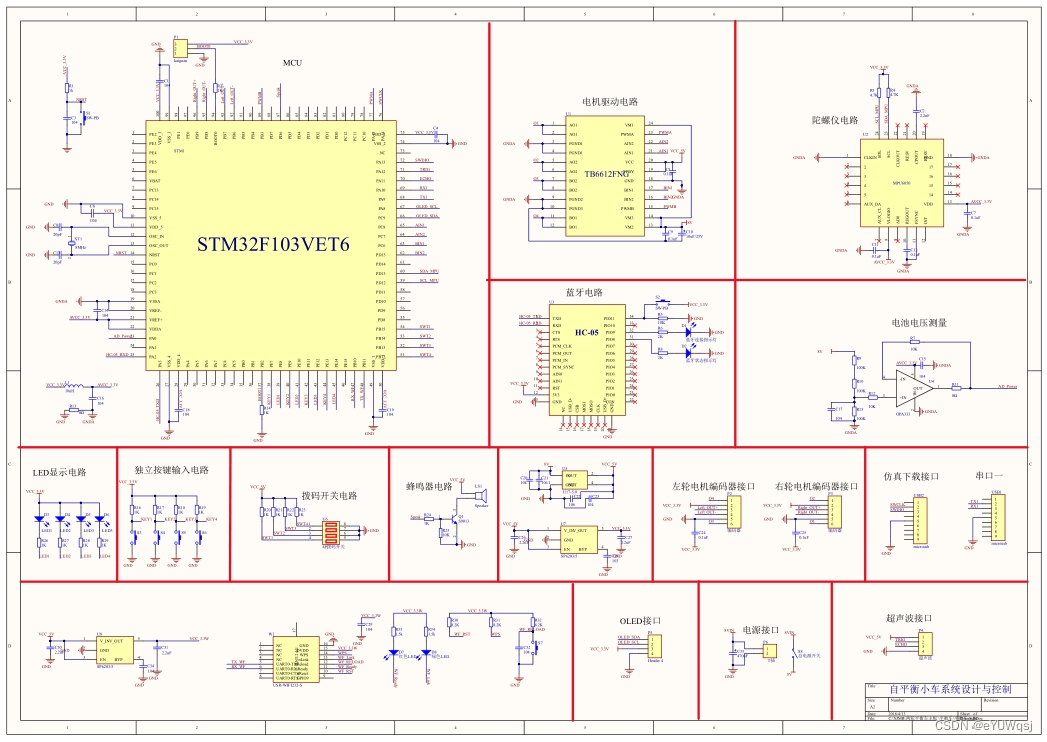
基于STM32的两轮平衡车项目设计与实践
引言:
随着嵌入式技术的发展,两轮平衡车已经成为一种流行的短途交通工具。本项目将介绍如何使用STM32微控制器来实现两轮平衡车的控制,包括硬件设计、软件编程和调试。通过本项目,读者将了解如何利用STM32进行嵌入式系统开发,并掌握两轮平衡车的控制原理。
一、硬件设计:
1.原理图设计:
本项目采用了STM32F4系列微控制器,具有高性能的ARM Cortex-M4内核,适用于复杂的控制算法。原理图设计包括微控制器、电机驱动、电源管理、姿态传感器等部分。
2.PCB设计:
PCB设计需要考虑信号完整性、电源完整性、电磁兼容性等因素。本项目采用四层板设计,包括信号层、地层、电源层等。
二、软件编程:
1.姿态解算:
通过姿态传感器(如陀螺仪和加速度计)获取原始数据,使用滤波算法(如卡尔曼滤波)对数据进行融合,得到准确的姿态角度。
2.控制算法:
采用PID控制算法对姿态角度进行闭环控制。PID控制器根据当前姿态角度与目标姿态角度的误差,通过比例、积分、微分三个环节输出控制量,调整电机转速以保持平衡。
3.电机驱动:
通过PWM(脉宽调制)方式控制电机驱动芯片,进而控制电机转速。本项目采用S
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









