







 本文介绍了结构光法深度相机的工作原理,通过与双目立体视觉对比,展示了结构光在匹配问题上的优势。文章详细讨论了直接编码、时分复用编码和空分复用编码三种编码方式,并以Kinect1和iPhone X的原深感相机为例,说明结构光法在实际应用中的性能和局限性。结构光相机在光照不足、纹理缺乏的环境下表现出色,但受限于室外环境和测量距离。
本文介绍了结构光法深度相机的工作原理,通过与双目立体视觉对比,展示了结构光在匹配问题上的优势。文章详细讨论了直接编码、时分复用编码和空分复用编码三种编码方式,并以Kinect1和iPhone X的原深感相机为例,说明结构光法在实际应用中的性能和局限性。结构光相机在光照不足、纹理缺乏的环境下表现出色,但受限于室外环境和测量距离。
本文已经首发在个人微信公共号:计算机视觉life(微信号CV_life),欢迎关注!
导读
结构光法:为解决双目匹配问题而生
深度图效果:结构光vs.双目
投射图案的编码方式
直接编码
时分复用编码
空分复用编码
Kinect1原理
iPhone X原深感相机是缩小版的更强大的Kinect1
结构光法优缺点总结
------------------------------------------------------------------
结构光法:为解决双目匹配问题而生
前面文章《深度相机原理揭秘--双目立体视觉》中提到基于双目立体视觉的深度相机对环境光照强度比较敏感,且比较依赖图像本身的特征,因此在光照不足、缺乏纹理等情况下很难提取到有效鲁棒的特征,从而导致匹配误差增大甚至匹配失败。
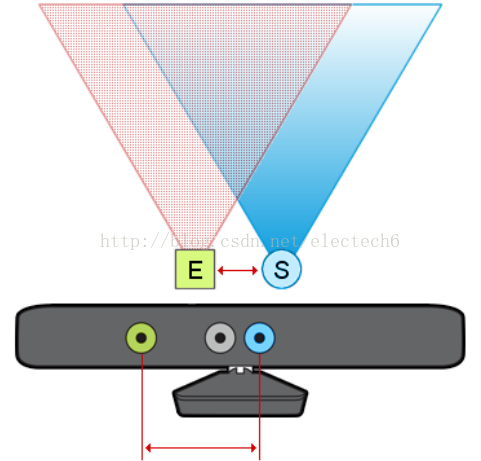
而基于结构光法的深度相机就是为了解决上述双目匹配算法的复杂度和鲁棒性问题而提出的,其他处理步骤和双目立体视觉类似,本文不再赘述。结构光法不依赖于物体本身的颜色和纹理,采用了主动投影已知图案的方法来实现快速鲁棒的匹配特征点,能够达到较高的精度,也大大扩展了适用范围。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









