






1. matlab 解 Ax=b
只写了最简单的方式,其中b需要是列向量,用分号隔开元素;
Ax = b
其中矩阵A(nxn) 和列向量 b(n) 已知;方程组的解存储在 x中,在matlab中写作:
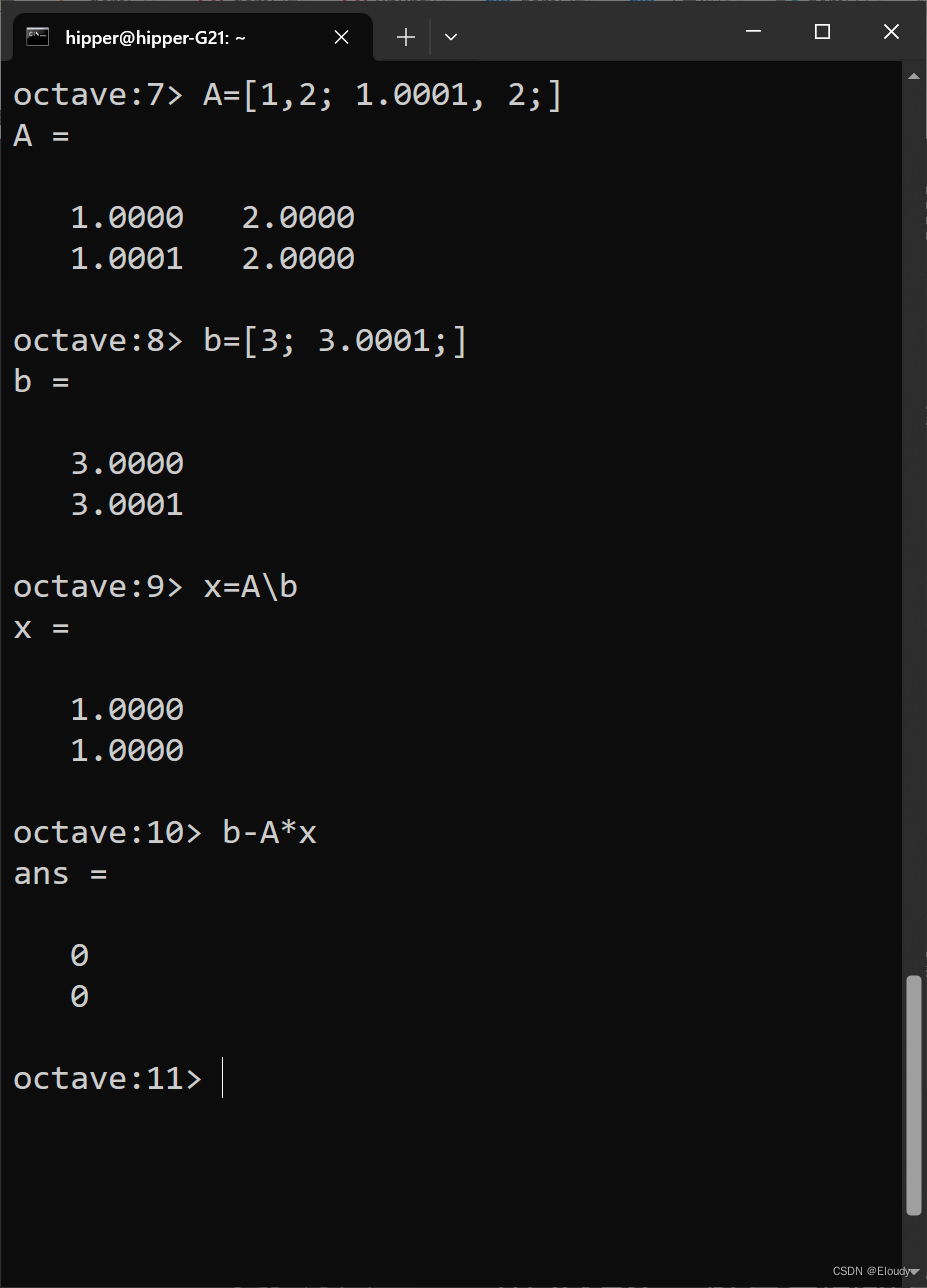
> x=A\b
octave:7> A=[1,2; 1.0001, 2;]
A =
1.0000 2.0000
1.0001 2.0000
octave:8> b=[3; 3.0001;]
b =
3.0000
3.0001
octave:9> x=A\b
x =
1.0000
1.0000
octave:10> b-A*x
ans =
0
0
octave:11>
2. Ax=b 迭代法算法示例
2.1 原理
迭代法的原理,是创建一个n维的无穷项的收敛数列,收敛的极限点 x 满足方程 Ax = b ;
使用矩阵A来制造收敛数列,有一些技巧,这里的示例由于 A 是严格主元占优的,所以比较容易制造收敛,直接挖掉了对角元;
详细原理可以参考数值计算教材,用到了矩阵的诱导范数、谱半径等相关的定理,并不复杂;
这里为了表述原理,我采用了矩阵语言的算法实现,大概原理如下,原理写的不太规范,凑活着跳过即可:
/********************************
*
* ******Ax = b*********
* x = Bx + f
* x = -D'(L+U)x + D'b
*
* Dx = b - (L+U)x
* ***********************下面是迭代过程
* X1=(L+U) * X0
* X1=b-X1
* Dx = X1 ***(这里D是对角阵,所以直接做标量除法即可得到x)
* x = D^-1 * X1
* X0 = x
*
* ******************************/
矩阵语言的实现有两个好处,一个是便于传统的理论分析,比如收敛性分析等,另一个好处是有利于 gpu并行实现;
2.2 源码实现
这里给出最简单的 Jacobi 迭代法求 Ax=b 的解;
gcc 直接编译即可运行;
jacobi.cpp
源码:
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#define NA 3
void test_sgemv(int op, int N, float a, float *AA, int lda, float b, float *yy);
void sgemv(int op, int N, float a, float *A, int lda, float b, float *y); // y = a*op(A)*X + b*y
void print_matrix(float *A, int N, int lda);
void print_vector(float *V, int N);
void set_LpU(float *LpU, float *A, int N);
void set_D(float *D, float *A, int N);
void Saxpy(int n, float alpha, float *x, float beta, float *y); //y = a*x + b*y
void x_div_y(int N, float* x, float* y);//x[i] = x[i]/y[i];
void Scopy(int n, float* x, float* y);// x -> y
void Saxpy(int n, float alpha, float *x, float beta, float *y) //y = a*x + b*y
{
for(int i=0; i<n; i++){
y[i] = alpha*x[i] + beta*y[i];
}
}
void x_div_y(int N, float* x, float* y){//x[i] = x[i]/y[i];
for(int i=0; i<N; i++)
x[i] = x[i]/y[i];
}
void Scopy(int n, float* x, float* y)// x -> y
{
for(int i=0; i<n; i++)
y[i] = x[i];
}
void Jacobi_Ax_b(float *A, float *b, float *X0, float *Xk, int N, float eps, int iter){
float *LpU = nullptr;
//float *X0 = nullptr;
//float *X1 = nullptr;
float *D = nullptr;
LpU = (float*)malloc( N*N*sizeof(float));
//X0 = (float*)malloc( N*sizeof(float));
//X1 = (float*)malloc( N*sizeof(float));
D = (float*)malloc( N*sizeof(float));
//1.0 set LpU, set D, X0 = 0;
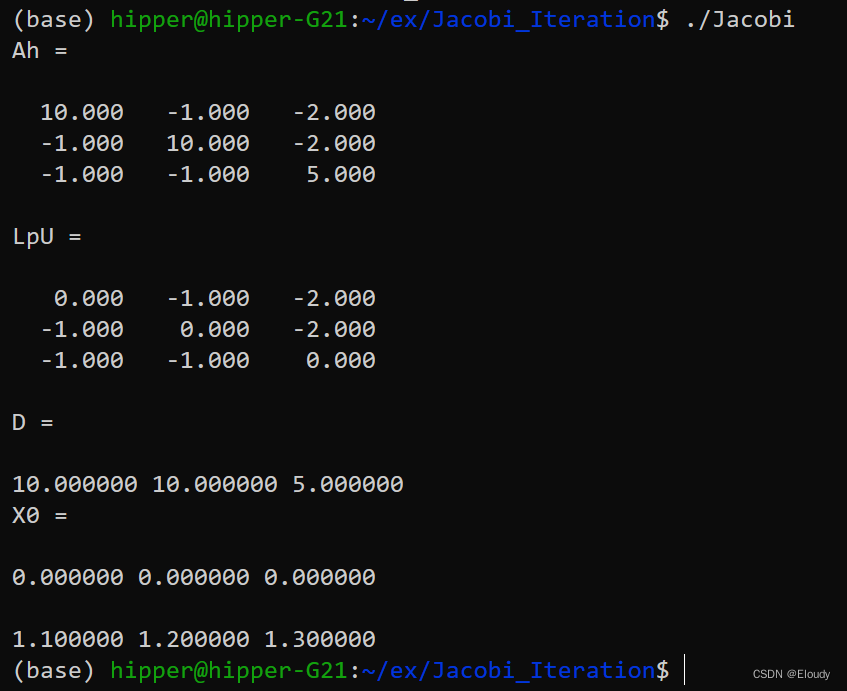
set_LpU(LpU, A, N); printf("LpU =\n"); print_matrix(LpU, N, N);
set_D(D, A, N); printf("D =\n"); print_vector(D, N);
memset(X0, 0, N*sizeof(float)); printf("X0 =\n"); print_vector(Xk, N);
//2.0 loop
/* S1 X1=LU* x0
* S2 X1=b-X1
* S3 Dx = X1
* S4 X1 = X1/D
*/
for(int it=0; it<iter; it++){
//void sgemv(int op, int N, float a, float *A, int lda, float b, float *y);
// S1 X1=LU* X0
sgemv(0, N, 1.0f, LpU, N, 0.0f, Xk);
//void Saxpy(int n, float alpha, float *x, float beta, float *y); //y = a*x + b*y
// S2 X1=b-X1
Saxpy(N, 1.0f, b, -1.0f, Xk);
//void x_div_y(int N, float* x, float* y){//x[i] = x[i]/y[i];
// S3 DXk+1 = Xk
x_div_y(N, Xk, D);
}
//Scopy(N, X1, xk);
}
void set_LpU(float *LpU, float *A, int N){
for(int i=0; i<N; i++){
for(int j=0; j<N; j++){
LpU[i + j*N] = A[i + j*N];
if(i == j)
LpU[i+i*N] = 0.0f;
}
}
}
void set_D(float *D, float *A, int N){
for(int i=0; i<N; i++)
D[i] = A[i + i*N];
}
void sgemv(int op, int N, float a, float *A, int lda, float b, float *y){
// y = a*op(A)*X + b*y
float* y0 = nullptr;
y0 = (float*)malloc(N*sizeof(float));
memcpy(y0, y, N*sizeof(float));
for(int i=0; i<N; i++){
float sigma = 0.0f;
for(int j=0; j<N; j++){
sigma += A[i + j*lda]*y0[j];
}
y[i] = a*sigma + b*y[i];
}
free(y0);
}
void print_matrix(float *A, int N, int lda){
printf("\n");
for(int i=0; i<N; i++){
for(int j=0; j<N; j++){
printf("%8.3f ", A[i + j*lda]);
}
printf("\n");
}
printf("\n");
}
void print_vector(float *V, int N){
printf("\n");
for(int i=0; i<N; i++){
printf("%f ", V[i]);
}
printf("\n");
}
//void sgemv(int op, int N, float a, float *A, int lda, float b, float *y){
void test_sgemv(int op, int N, float a, float *AA, int lda, float b, float *yy){
float *y = nullptr;
float *A = nullptr;
y = (float*)malloc(N*sizeof(float));
A = (float*)malloc(N*N*sizeof(float));
memcpy(y, yy, N*sizeof(float));
memcpy(A, AA, N*N*sizeof(float));
printf("\nA =\n");
print_matrix(A, N, N);
printf("\ny =\n");
print_vector(y, N);
sgemv(1, N, a, A, lda, b, y);
printf("\n y=Ax+y=\n");
print_vector(y, N);
free(y);
free(A);
}
int main(){
float A[NA*NA] =
{
10, -1, -1, -1, 10, -1, -2, -2, 5
// 10, 2, 1, 3, -10, 3, 1, 3, 10// column major
/*
10, 3, 1,
2, -10, 3,
1, 3, 10*/
};
float b[NA]={
7.2, 8.3, 4.2
//14, -5, 14
};
// void test_sgemv(int op, int N, float a, float *AA, int lda, float b, float *yy){
//test_sgemv(1, NA, 1.0f, A, NA, 1.0f, b);
float* Ah = nullptr;
float* bh = nullptr;
int N = NA;
Ah = (float*)malloc(N*N*sizeof(float));
bh = (float*)malloc(N*sizeof(float));
memcpy(Ah, A, N*N*sizeof(float));
memcpy(bh, b, N*sizeof(float));
printf("Ah =\n");
print_matrix(Ah, N, N);
float *x0 = nullptr;
float *x1 = nullptr;
x0 = (float*)malloc(N*sizeof(float));
x1 = (float*)malloc(N*sizeof(float));
float eps = 1.0e-7;
int iter = 15;
Jacobi_Ax_b(Ah, bh, x0, x1, N, eps, iter);
print_vector(x1, N);
return 0;
}编译:
Makefile
Jacobi: hello_Jacobi.cpp
g++ -g $< -o $@
.PHONY: clean
clean:
-rm -rf Jacobi絮叨地提示一下,g++ 行的前面是一个 tab空格,Makefile的语法要求,-rm 前面也是;
运行:
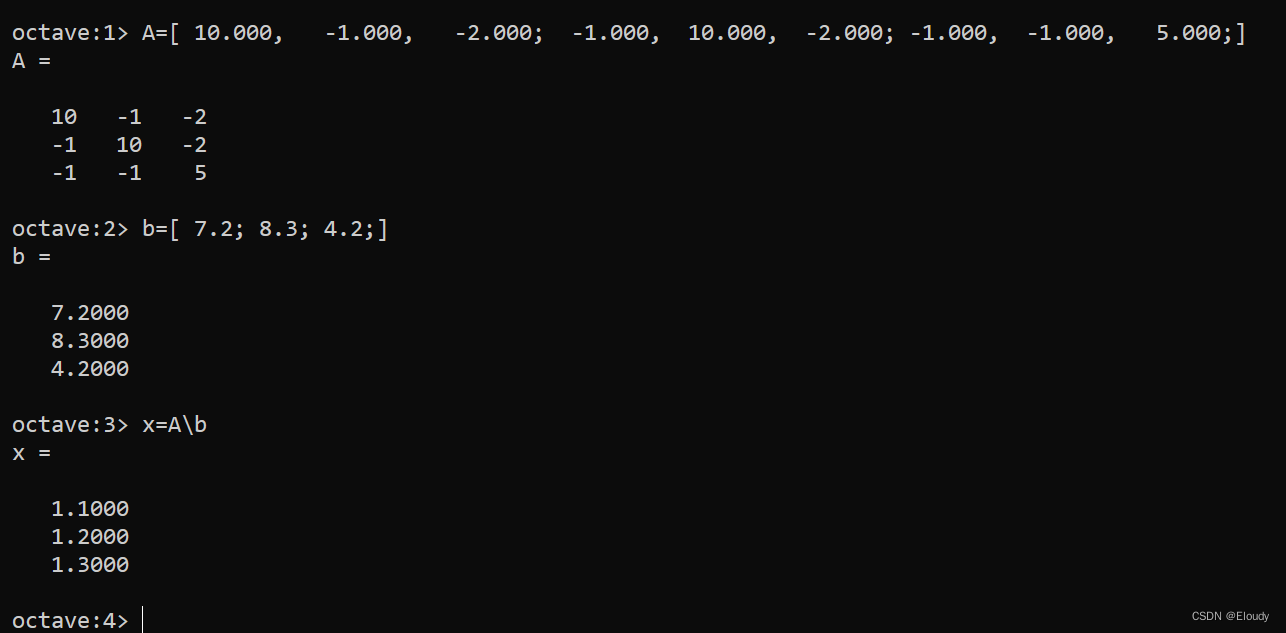
3.3 matlab 对结果进行验证:














 2924
2924











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









