










先上关系图:
先来看一张内存条的内存在linux内核中是怎么被组织起来的?
每张内存条在内核中叫一个node
在linux内核中用pglist_data来描述一个node,每个node分成了多个zone,每个zone分成了11个free_area,每个free_area存储了不同大小的页表分别有11种(2^0个page,2^1个page... 2^10个page),每一种大小的页表链又被分到了6种状态子链表(根据页表是否能够移动MOVEABLE等)
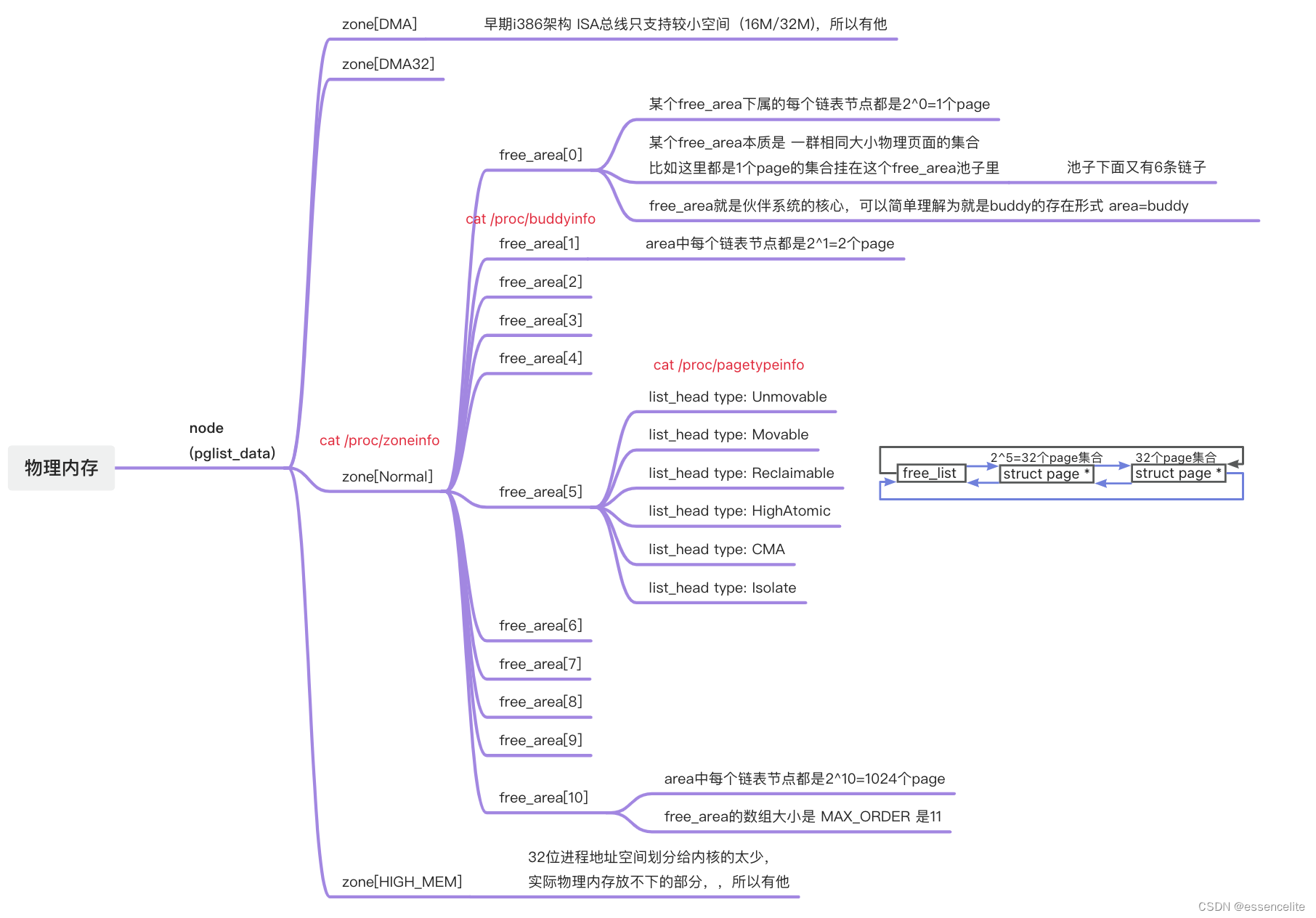
详细参考文章:手撕烂笔头-Linux内核中物理内存是如何组织起来的?
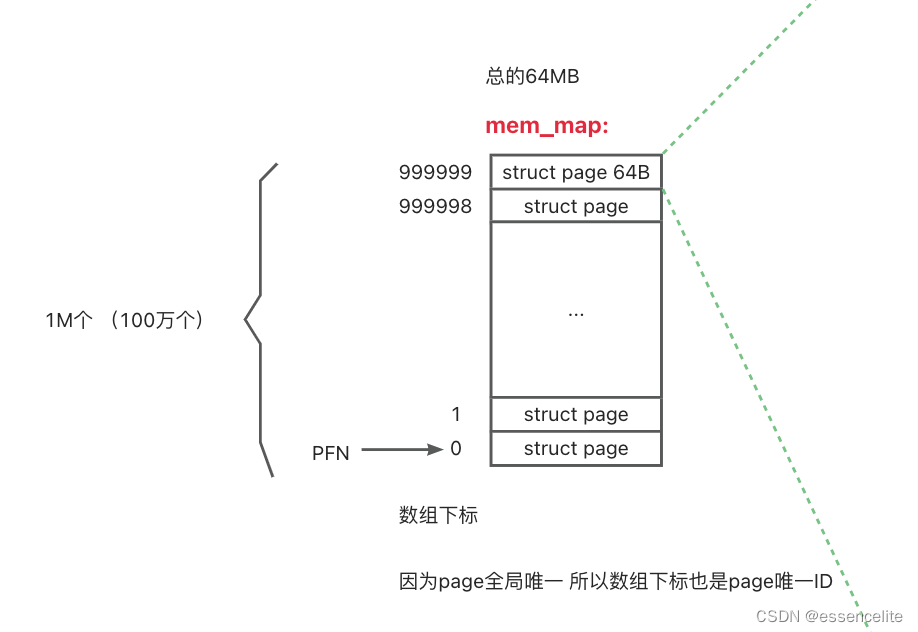
所以本质是按照page进行组织的,这些page存在在哪?
mem_map
![]()
参考代码:
memory.c - mm/memory.c - Linux source code (v5.10.134) - Bootlin
mem_map初始化
查看源码分配了n个struct page的内存。所以相当于是一个大数组。
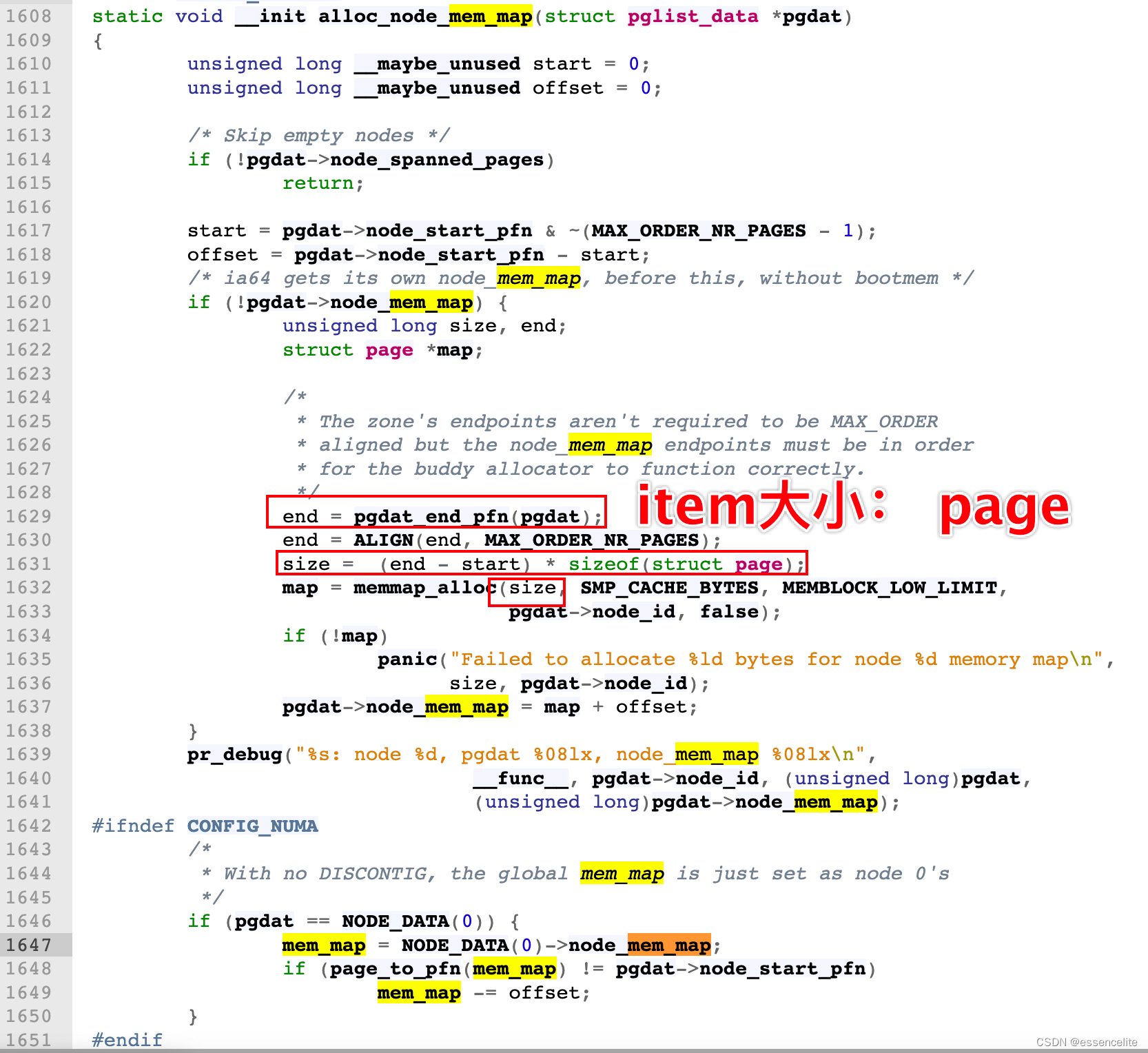
mm_init.c - mm/mm_init.c - Linux source code (v6.4.8) - Bootlin
如果按照4G物理内存,4K大小的页表,需要4G/4K=1M个,也就是100万个page。
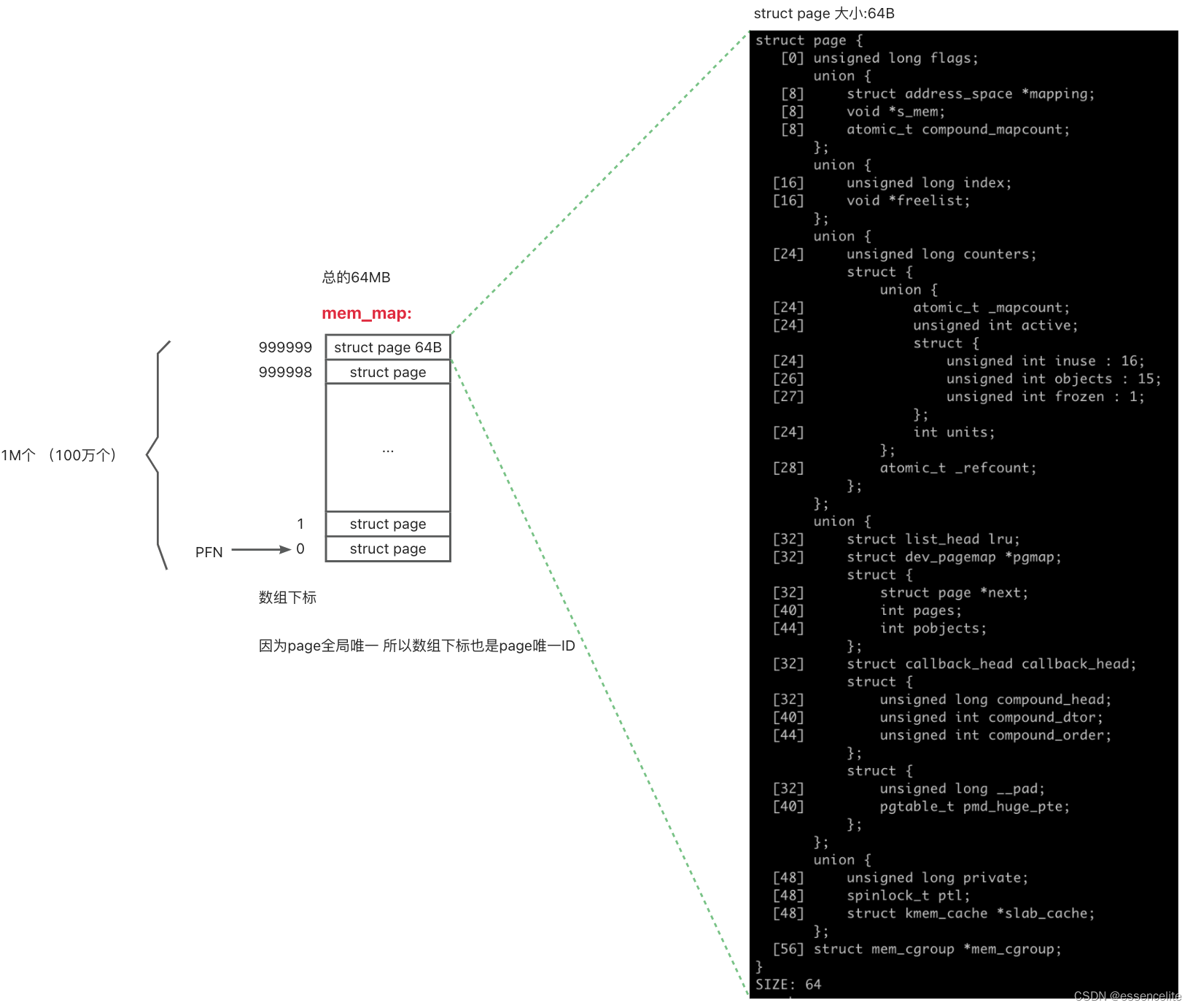
再来看mem_map有多大?
每个page的大小:64B

1M个64B就是64M的mem_map的数组。
PFN到底是什么?
前面把物理内存分成了4K的页,并且用了1M个元素的mem_map管理这100万个页表。
然后每个页就是一个页帧 page frame。
再看PFN全称是什么 page frame number。
所以PFN其实就是这个mem_map的帧序号,或者说index,或者说数组的下标。
为什么用PFN来唯一表示页帧?因为系统所有内存都在mem_map中,所以每一个页帧就有一个唯一id,就是这个PFN,相当于page在mem_map中的身份证。
再看PFN和struct page是什么关系?
根据上面的数据可以得到page全局唯一,所以数组下标也是page唯一ID,所以某个PFN就是它对应的某个struct page在mem_map中的数组下标,通过PFN就能找到这个page的描述符,就能操作这个page
进一步延伸:PFN和struct page如何相互转换?
知道了PFN、mem_map、struct page之间的关系,就能够灵活运用。而且在系统中基本用PFN进行传递struct page,比直接传递struct page的指针(4字节)方便一些(一个int值4字节,并且不需要包含struct page定义)。所以PFN经常用到。
而且PFN比struct page还天生带了一些属性,因为PFN是代表的顺序存储的属性,二struct page只是离散的某个节点。那么在表示多个page尤其是连续性的时候,不用知道struct page大小就能访问周边的page。而且能够用pfn之间关系快速算出page数量,这一点尤其是在DMA场景很有用。
既然PFN和struct page都能唯一表达某个page,那么如何相互转化?
系统提供了两个接口:
page_to_pfn(page)
pfn_to_page(pfn)
memory_model.h - include/asm-generic/memory_model.h - Linux source code (v6.4.8) - Bootlin
可以看到 pfn到page 就是用mem_map直接加上pfn。
反之,如果要根据page计算pfn,也是用mem_map这个基础值进行转换
综述
综述,物理页表的PFN到底是什么?PFN与struct page有什么关系?
物理页表的PFN是某个物理页面的全局唯一描述符struct page的序号,也是在mem_map中的下标。
PFN就是它对应的某个struct page在mem_map中的数组下标。也是页表的全局唯一ID。并且在上层应用找物理地址的一种描述。
















 712
712

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









