






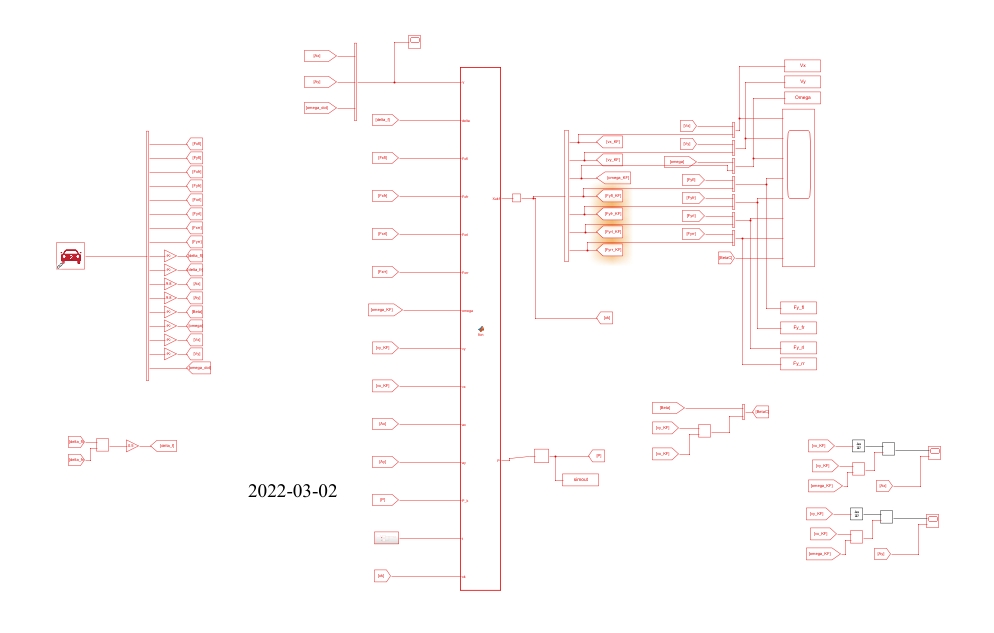
基于无迹卡尔曼滤波(Unscented Kalmam Filter, UKF)的车辆状态观测器 Carsim与Simulink联合
可估计车辆纵向车速,横向车速,横摆角速度和四个车轮侧向力(效果见图)
UKF使用子函数形式编程,只要定义好状态方程和观测方程,便可方便的进行二次开发
Carsim2018 兼容Carsim2019 MATLAB2018b
带有详细注释和说明文档
Carsim与Simulink联合估计难度与单纯的Simulink模型估计难度不同
★用Carsim做状态估计的难度在于carsim的车辆模型完全是黑箱状态,为了获得较好的估计结果需要不断的调整车辆模型参数
★估计的参数较多也增加了估计难度,比如估计侧向车速需要用到轮胎侧向力,但轮胎侧向力也是需要通过估计获得的,这样就会存在误差的累积,因此估计的参数越多难度越大
ID:93169669436989492
让一部分人先把模型搞起来


基于无迹卡尔曼滤波的车辆状态观测器在现代汽车工程中具有广泛的应用。该观测器通过结合Carsim和Simulink两个软件平台,可实时、准确地估计车辆的纵向车速、横向车速、横摆角速度和四个车轮的侧向力等参数。
无迹卡尔曼滤波(Unscented Kalmam Filter, UKF)是一种非线性滤波算法,相对于传统的卡尔曼滤波,UKF能够更好地处理非线性系统。UKF采用子函数形式编程,只需定义好状态方程和观测方程,即可方便地进行二次开发。在Carsim与Simulink联合估计车辆状态方面,UKF表现出了优越的性能。
然而,与单独使用Simulink进行模型估计相比,Carsim与Simulink联合估计车辆状态的难度有所不同。首先,Carsim的车辆模型是一个完全的黑箱状态,无法直接获取其内部参数。为了获得较好的估计结果,需要不断调整车辆模型的参数。这一过程需要依赖经验和实际测试数据,具有一定的耗时和难度。
此外,联合估计的目标参数较多,例如估计侧向车速需要用到轮胎的侧向力。然而,轮胎的侧向力也是需要通过估计获得的,这就存在着误差的累积问题。参数越多,估计的难度就越大。因此,在联合估计过程中,需要仔细考虑参数之间的相互关系,以及误差的传递和累积问题。
为了解决这些问题,本文提出了一种基于UKF的车辆状态观测器设计方法,通过优化Carsim模型参数和UKF算法参数,实现了较好的估计效果。首先,基于实际车辆测试数据,调整Carsim模型的参数,使其能够更好地拟合实际车辆行为。然后,利用UKF算法对车辆状态进行观测和估计。通过与实际测量数据的对比,验证了该方法的有效性和准确性。
在具体实现过程中,我们使用了Carsim2018和Simulink2019以及MATLAB2018b等软件版本。这些软件平台相互兼容,并提供了详细的注释和说明文档,方便用户进行使用和二次开发。
总结起来,基于无迹卡尔曼滤波的车辆状态观测器能够准确估计车辆的纵向车速、横向车速、横摆角速度和车轮侧向力等参数。通过Carsim与Simulink联合估计的方法,可以充分利用两个软件平台的优势,提高估计精度。然而,这种方法也存在着一定的挑战和难度,包括Carsim车辆模型的黑箱状态和估计参数的累积误差等问题。因此,在实际应用中,需要仔细调整参数和算法,以取得更好的估计结果。
相关的代码,程序地址如下:http://nodep.cn/669436989492.html
















 4605
4605

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









