







一.参数解析
1.gyroscope陀螺仪
1.1d动态误差指标
(1)dynamic/Full-Scale range动态范围/满量程: 指的是量程, 量程越大,绝对误差越大.
(2)车载:使用500 deg/s量程
(3)无人机:使用2000deg/s量程
(2)sensitivity scale factor比例因子灵敏度: 有时直接表示sensitivity,都指的是惯性器件的比例因子(标度因子)的设计值。
它的单位是LSB/°/sec或LSB/(°/sec),LSB是指传感器输出数字量的最低有效位(Least Significant Bit).
它的作用: 如何将器件输出的数字量转化成陀螺角速度,这个有点像导航报文中如toc的比例因子最低有效位为16(2的四次方 ),即获取的值要乘以16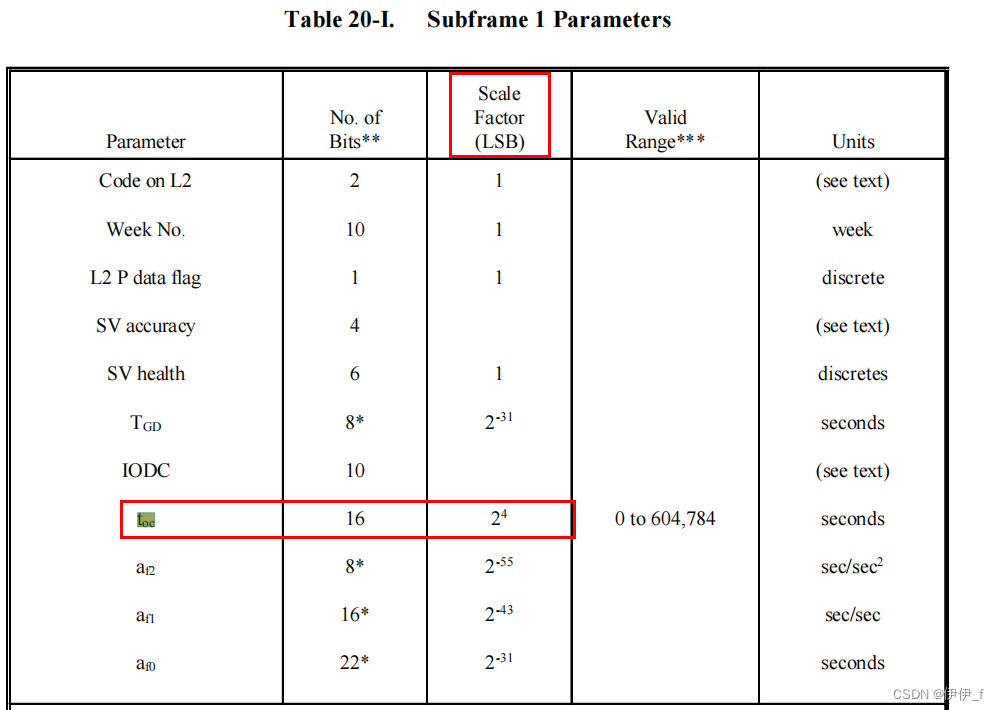
(3)Sensitivity Scale Factor Initial Tolerance比例因子的初始值误差![]()
(4)Repeatability:指的是陀螺比例因子的逐次上电重复性,(另一个说法是 惯性器件不同次上电运行时的零偏的不重复程度)。这是关键误差指标![]()
误差为1sigma 0.3%,算是比较大的. 2sigma 0.6%
(5)Sensitivity Scale Factor Variation Over Temperature/Error over Temperature 比例因子的全温误差: 指的是 比例因子在额定工作温度范围内相对于室温(25℃)比例因子的相对变化.反应比例因子对温度的敏感度. 0.005%算是对温度不怎么敏感
(6)Cross-Axis Sensitivity/Misalignment Error:指的是陀螺三轴的非正交误差
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 929
929

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









