







POS数据参数的介绍
无人机在飞行作业时,获取的无人机影像通常会携带配套的POS数据。从而在处理中可以更加方便的处理影像。而POS数据主要包括GPS数据和IMU数据,即倾斜摄影测量中的外方位元素:(纬度、经度、高程、航向角(Phi)、俯仰角(Omega)及翻滚角(Kappa))。
GPS数据一般用X、Y、Z表示,代表了飞机在飞行中曝光点时刻的地理位置。
IMU数据主要包含了:航向角(Phi)、俯仰角(Omega)及翻滚角(Kappa)三个数据。
1、航向角(Phi)
航向角英文缩写是:Phi。定义为:飞机和航天飞机的纵轴与地球北极之间的夹角。
示意图如下图所示:
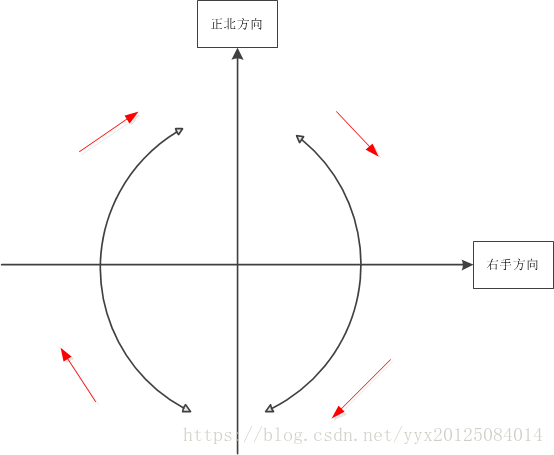
2、俯仰角(Omega)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









