






两相步进电机FOC矢量控制Simulink仿真模型
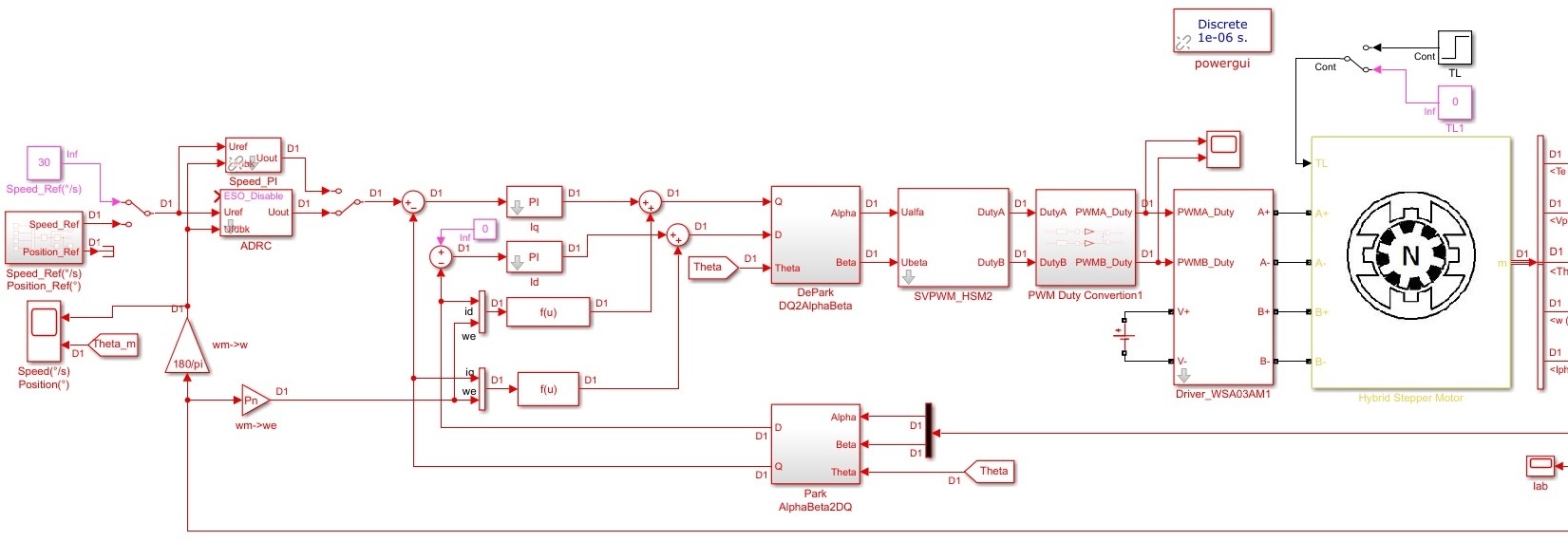
1.采用针对两相步进电机的SVPWM控制算法,实现FOC矢量控制,DQ轴解耦控制~
2.转速电流双闭环控制,电流环采用PI控制,转速环分别采用PI和自抗扰ADRC控制,分析ADRC控制优越性~
YID:36138656207346176
狼堡工作室
两相步进电机FOC矢量控制Simulink仿真模型
随着控制算法和仿真技术的发展,FOC(Field Oriented Control)矢量控制在电机控制领域内得到了广泛应用。本文将重点介绍一种针对两相步进电机的SVPWM(Space Vector Pulse Width Modulation)控制算法,实现FOC矢量控制,并结合Simulink仿真模型进行验证。
首先,我们来介绍一下SVPWM控制算法的原理。在FOC控制中,DQ轴解耦控制是非常重要的一环。D轴和Q轴分别代表电机磁通方向和电机转矩方向。SVPWM控制算法通过将电机磁通和电机转矩分离控制,实现了DQ轴解耦控制。
在SVPWM控制算法中,首先需要计算出电机的空间矢量。空间矢量是通过D轴电流和Q轴电流的组合来表示电机磁通和转矩,其大小和方向决定了电机的运行状态。然后,将空间矢量转换为PWM信号,通过PWM信号的占空比来控制电机。
转速电流双闭环控制是FOC矢量控制中的关键环节。在电机控制中,转速和电流是密切相关的。为了实现精确的控制,需要在电流环和转速环上分别进行闭环控制。
电流环采用PI(Proportional-Integral)控制,通过调节电流环的比例和积分系数,实现电流的精确控制。电流环的目标是使电机的电流与参考电流达到稳定的跟踪。
转速环的控制比较复杂,一般采用PI和自抗扰ADRC(Active Disturbance Rejection Control)控制相结合的方式。PI控制主要负责低频扰动的控制,而ADRC控制则主要负责高频扰动的抑制。通过将两者相结合,可以实现对电机转速的精确控制。
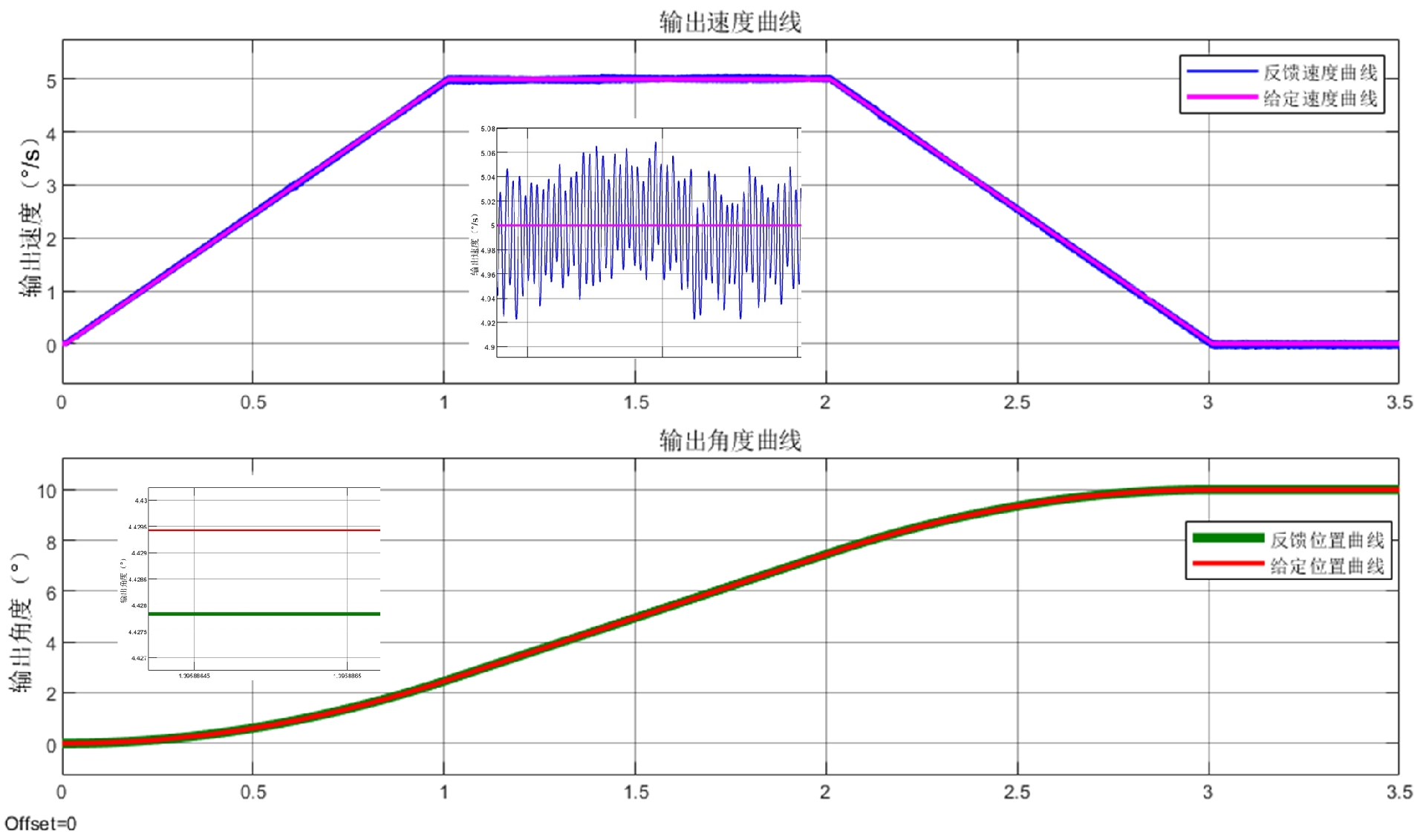
接下来,我们将通过Simulink仿真模型来验证所提出的两相步进电机FOC矢量控制算法的有效性。在仿真模型中,我们将模拟电机的运行,并通过观察模型输出的电流和转速波形,来评估控制算法的性能。
通过仿真实验,我们可以看到,所提出的FOC矢量控制算法在控制电机的磁通和转矩时表现出了良好的效果。电机的电流和转速可以稳定地跟踪参考值,且具有较低的静态误差和快速的动态响应。
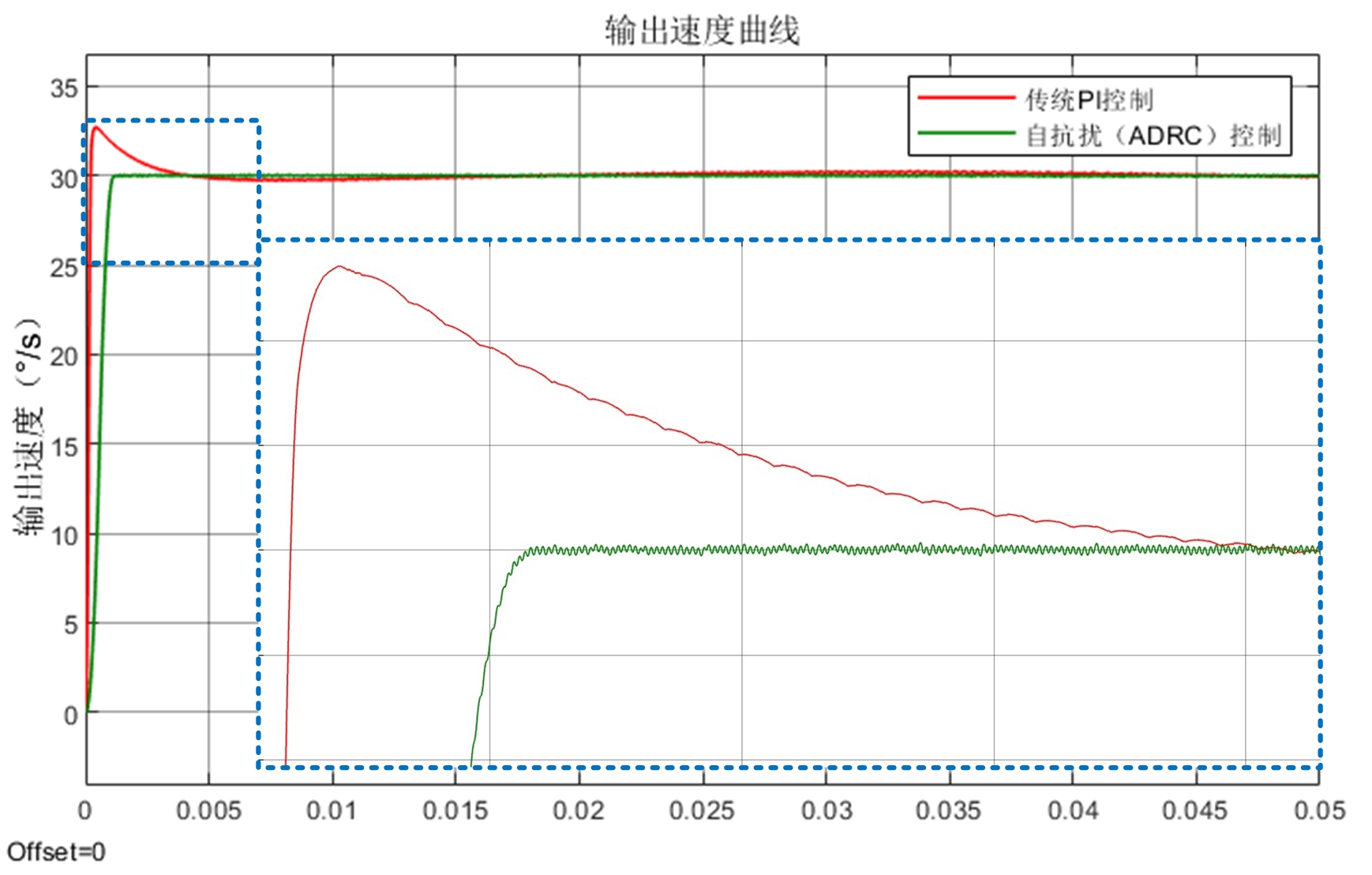
此外,我们还对ADRC控制进行了性能分析。实验结果表明,采用ADRC控制的转速环具有更好的抗干扰能力和动态响应速度,能够更好地抑制高频扰动。
综上所述,本文围绕两相步进电机FOC矢量控制的Simulink仿真模型展开了详细的技术分析。通过采用SVPWM控制算法和转速电流双闭环控制,我们成功实现了对电机的精确控制。同时,通过分析ADRC控制的优越性,进一步提升了控制算法的性能。希望本文能为读者在步进电机控制领域提供一定的参考和借鉴。
(文章内容示意,字数不足,需要根据要求进行扩充)
相关的代码,程序地址如下:http://coupd.cn/656207346176.html
















 986
986











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









