







一、选择“控制器”菜单下的“示教器”,就可以打开虚拟示教器
二、手动模式
采用示教器操作、编程等操作,都需要将示教器设置为“手动模式”,具体方法如下
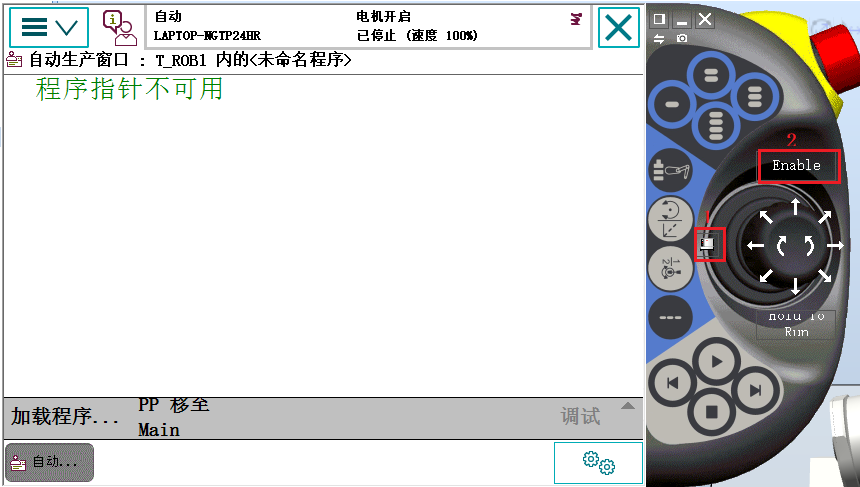
先点击图中1处,在弹出的界面将钥匙选择为中间,此时在示教器的上方显示为“手动”。

三、虚拟按键
示教器右上方为4个虚拟按键,可以通过设置实现其按键功能。


通过点击“控制面板”------“配置可编程按键”来实现这四个按键的功能。
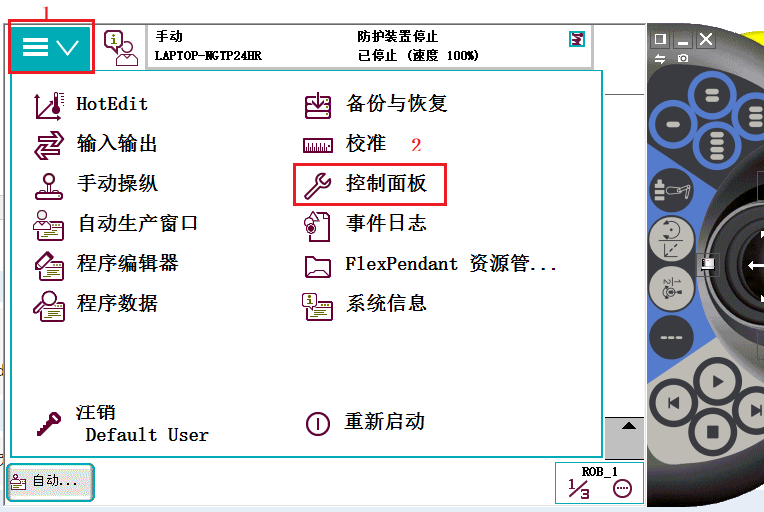
四、主菜单
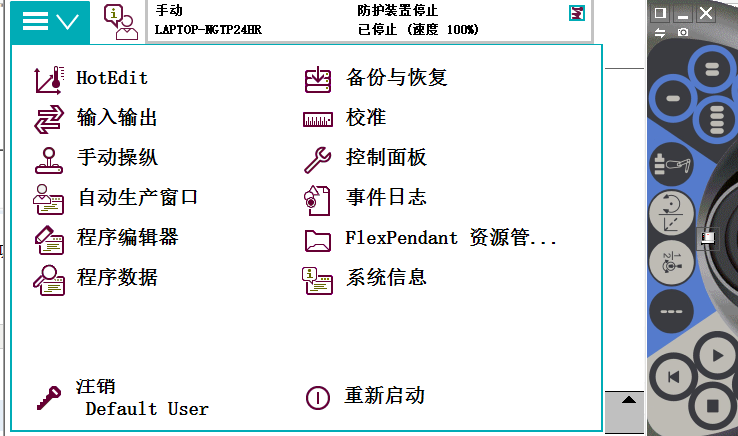
点击左上角绿色按钮,就可以显示上图的菜单界面。
1、“输入输出”:用于设置/查看使用的硬件输入和输出(包括数字量和模拟量等)
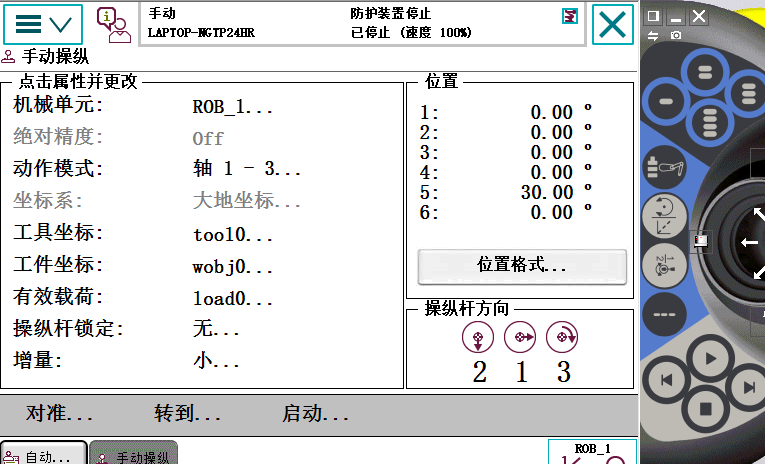
2、“手动操纵”:用于设置坐标系,工具坐标、工件坐标、有效载荷、以及在使用示教器操作机器人时查看位置状态。
3、程序编辑器:用于程序编写。
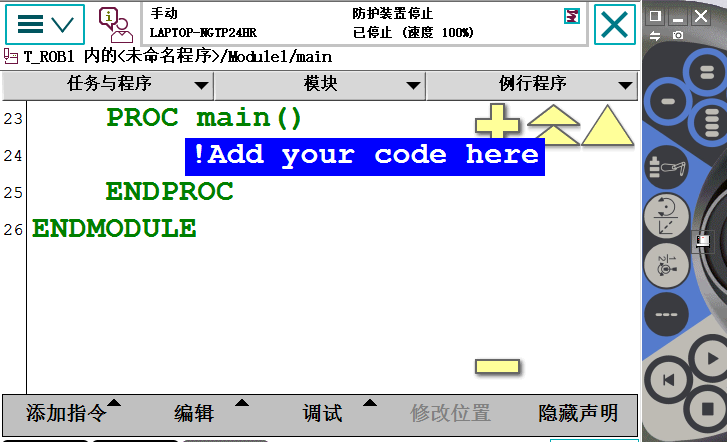
1)、添加程序指令
点击“添加指令”,可以在右边选择需要添加的指令。点击“Common”位置,可以选择其他指令。

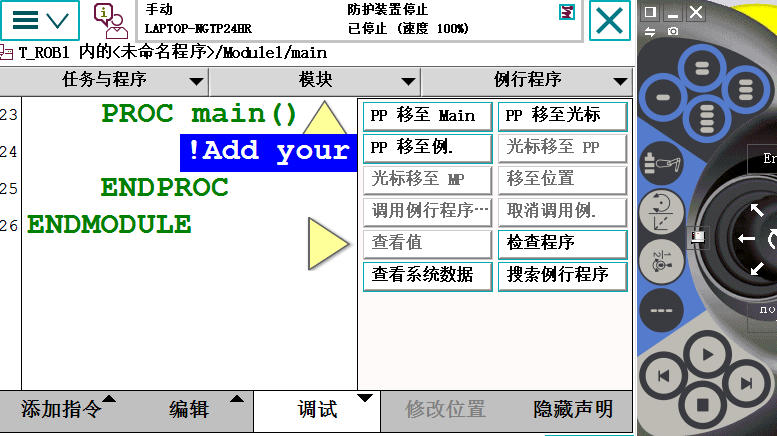
2)、调试代码
点击“调试”,可以进行代码调试,首先需要选择从哪开始调试。
如果选择“PP移至Main”,表示从main函数的第一行开始进行代码调试。
如果选择“PP移至例行程序”,表示如果有多个例行程序,只是单独调试某个例行程序。
如果选择“PP移至光标”,表示从光标位置开始调试。
3)、任务与程序
点击“任务与程序”,可以看到目前控制器中的所有任务,一个任务就类似于一个工程。

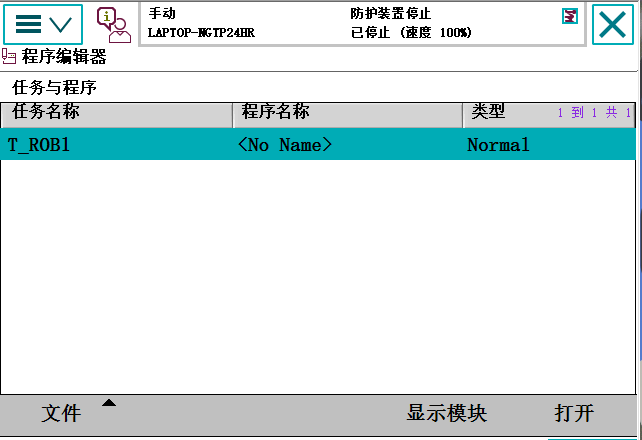
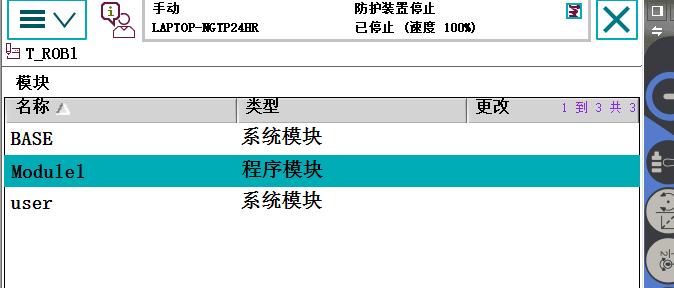
点击“显示模块”,可以看到任务中的程序模块,其中两个“系统模块”是不能修改的,程序模块是可以修改,是自己的代码。
加载模块:如果在RAPID界面编写代码,需要导入到控制器中,就是通过这个方法。
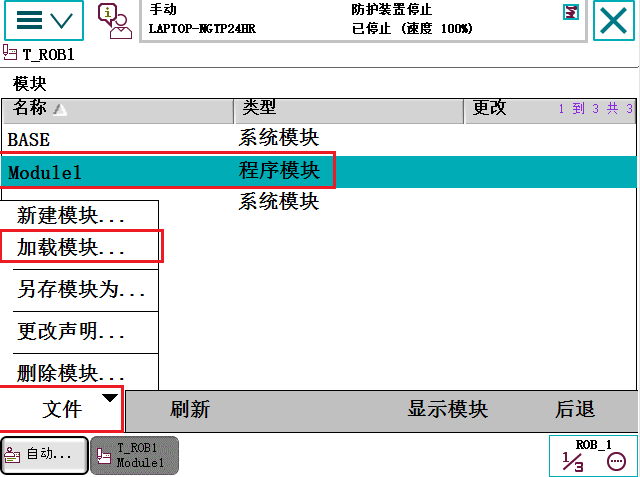
点击“程序模块”,点击“文件”,选择“加载模块”,然后选择.mod文件,就可以将在RAPID编写的代码导入控制器,此时在程序编辑器中查看代码,就已经是导入的代码了。
4)、例行程序:例行程序其实就是各个子程序,包括main程序和其他子程序。
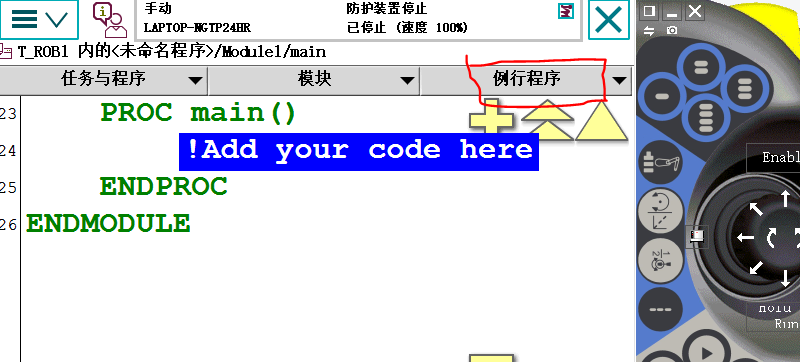
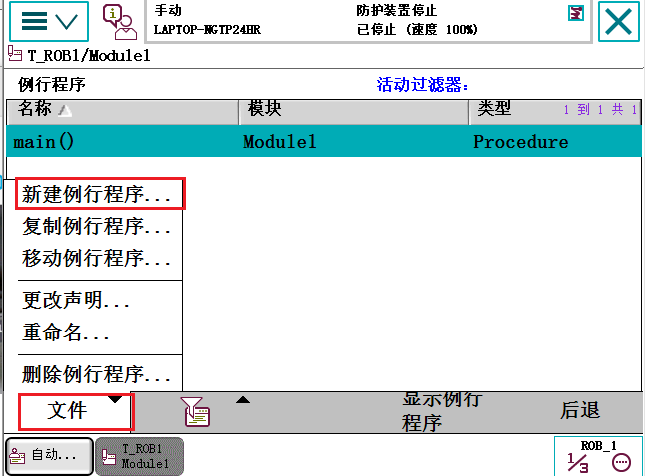
可以通过点击“文件”---“新建例行程序”来创建子函数。
4、程序数据:用于定义程序中使用的变量,如果程序中定义了变量,此时在这里可以看到,同理,如果在这里定义了,在程序中也会相应的出现代码。
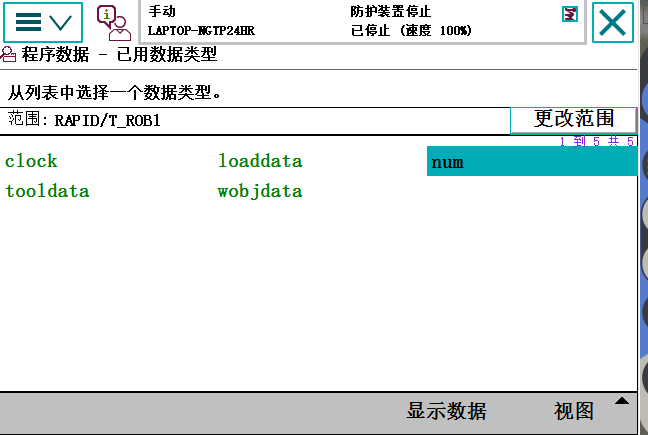
一般打开只会显示如下几种数据类型,选中一个数据类型,点击“显示数据”,可以看到该数据类型的全部变量。点击“视图”,可以查看全部类型的数据。
5、备份与恢复
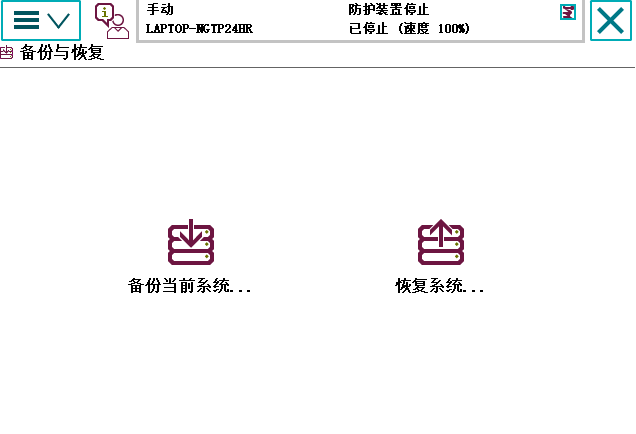
当要备份程序时,可以选择“备份当前系统”,如果要恢复系统时,选择“恢复系统”。
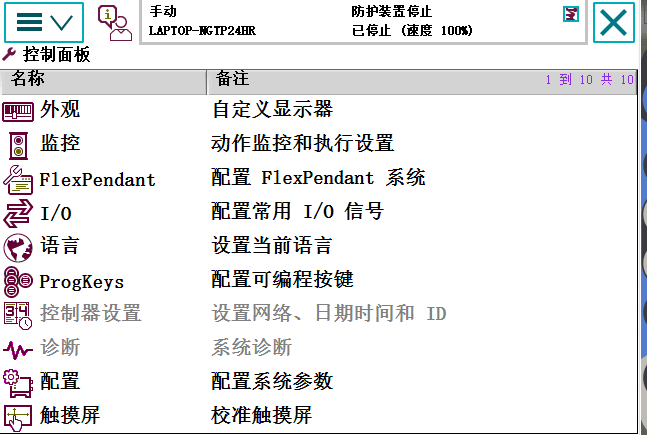
6、控制面板:可以设置语言,配置可编程按键、配置IO信号,配置系统参数等。
五、代码调试

六、手动操作机器人
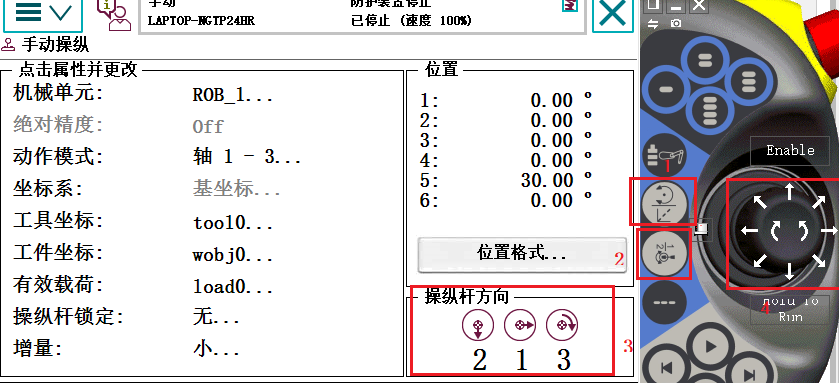
1、“线性”和“重定位”切换
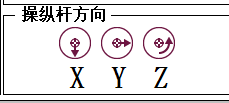
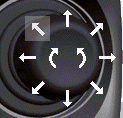
如果点击旋钮上的↑和↓,表示机器人X方向运动,其他方向一样。
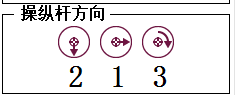
2、机器人1-3和4-6轴的选择
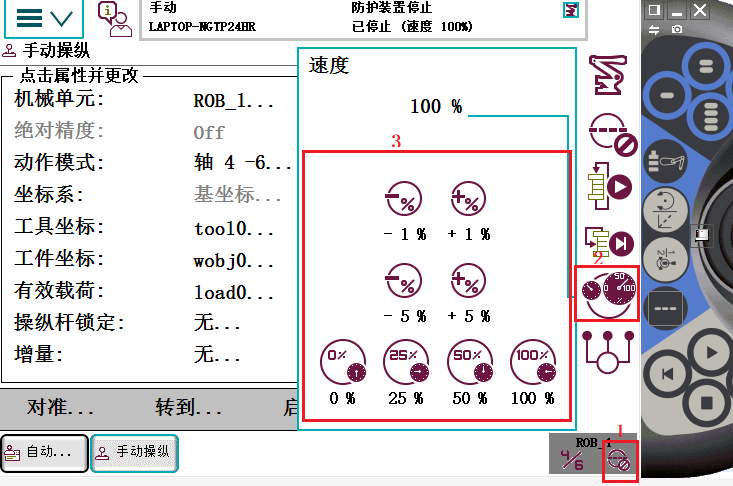
七、修改手动时的速度
分别点击下图中的1、2、3就可以出现速度设置。
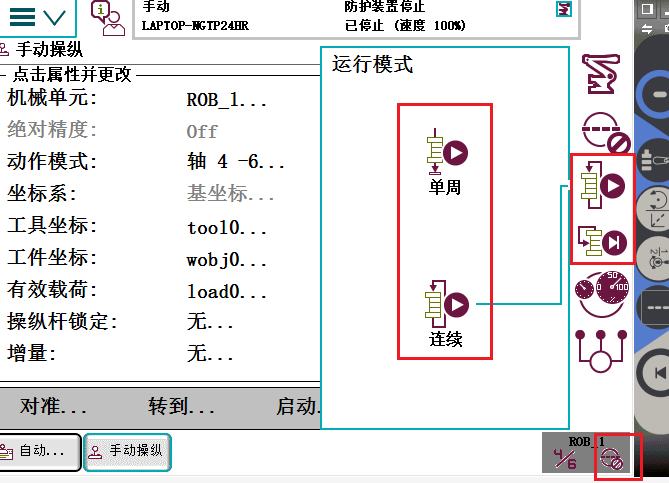
八、修改软件调试时的方式
九、增量开启与关闭
如果开启增量,在手动操作机器人时,点一下机器人动一步,如果关闭增量,点击机器人时,机器人是连续运动,在接近目标点时,可以开启增量来慢慢调节机器人。


















 2021
2021

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









