







 本文探讨了BLDC电机在不同应用场景下的控制方法,包括六步换向法的驱动原理和位置/速度PID闭环控制。实验表明,BLDC电机具有高转速和较大扭矩的特点,适合中低精度且成本敏感的场合,但位置控制精度有待提高。
本文探讨了BLDC电机在不同应用场景下的控制方法,包括六步换向法的驱动原理和位置/速度PID闭环控制。实验表明,BLDC电机具有高转速和较大扭矩的特点,适合中低精度且成本敏感的场合,但位置控制精度有待提高。
1.概述
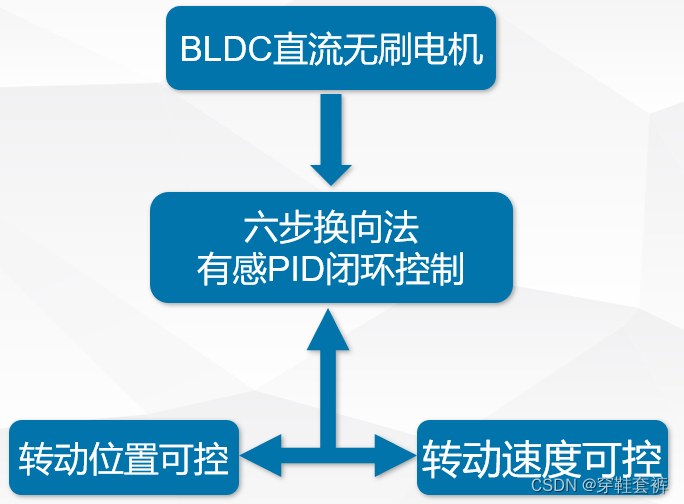
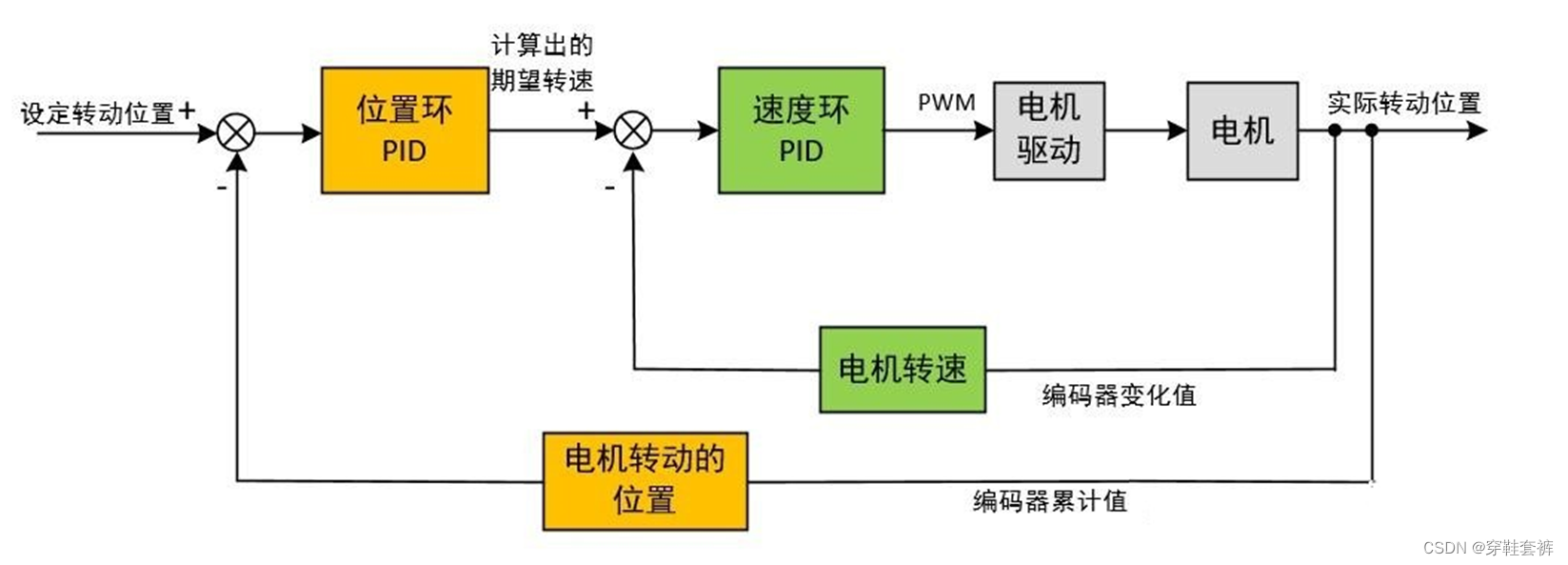
本次主要想探索BLDC电机在大力矩、中低精度和低成本的应用场景下,实现转动位置和速度可控的方法,为后续开发一款基于BLDC电机的伺服系统,取代直流有刷和步进电机提供理论依据。初步实现方案如下图:
2.直流无刷电机简介
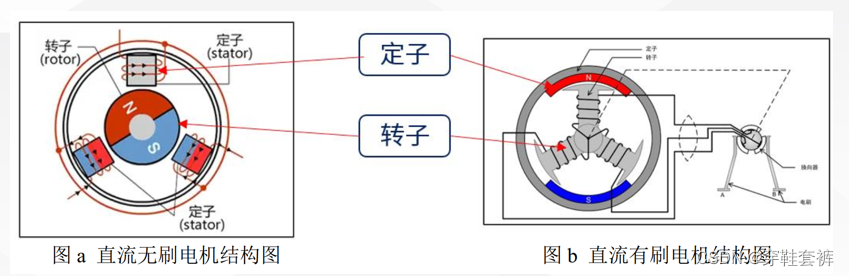
直流无刷电机,顾名思义就是没有了电刷和换向器的直流电机。直流无刷电机的线圈绕组不参与旋转,而是作为定子,永磁体作为转子,所以需要通过控制线圈电流方向来改变磁场方向从而使转子持续旋转,所以直流电机又称电子换向电机。
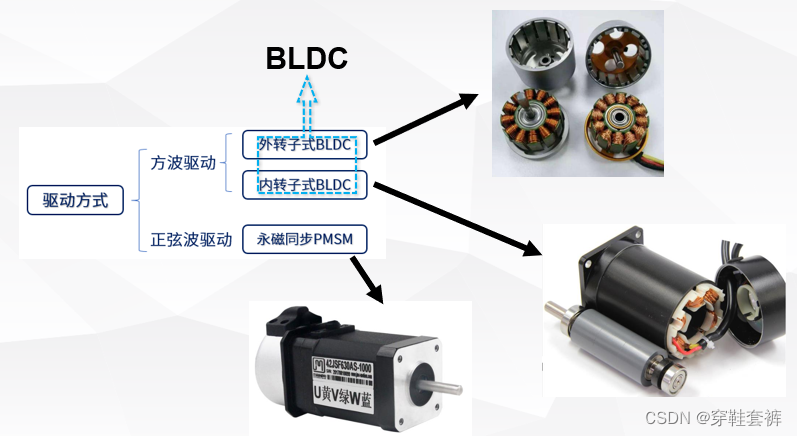
直流无刷电机分类:
3.控制原理
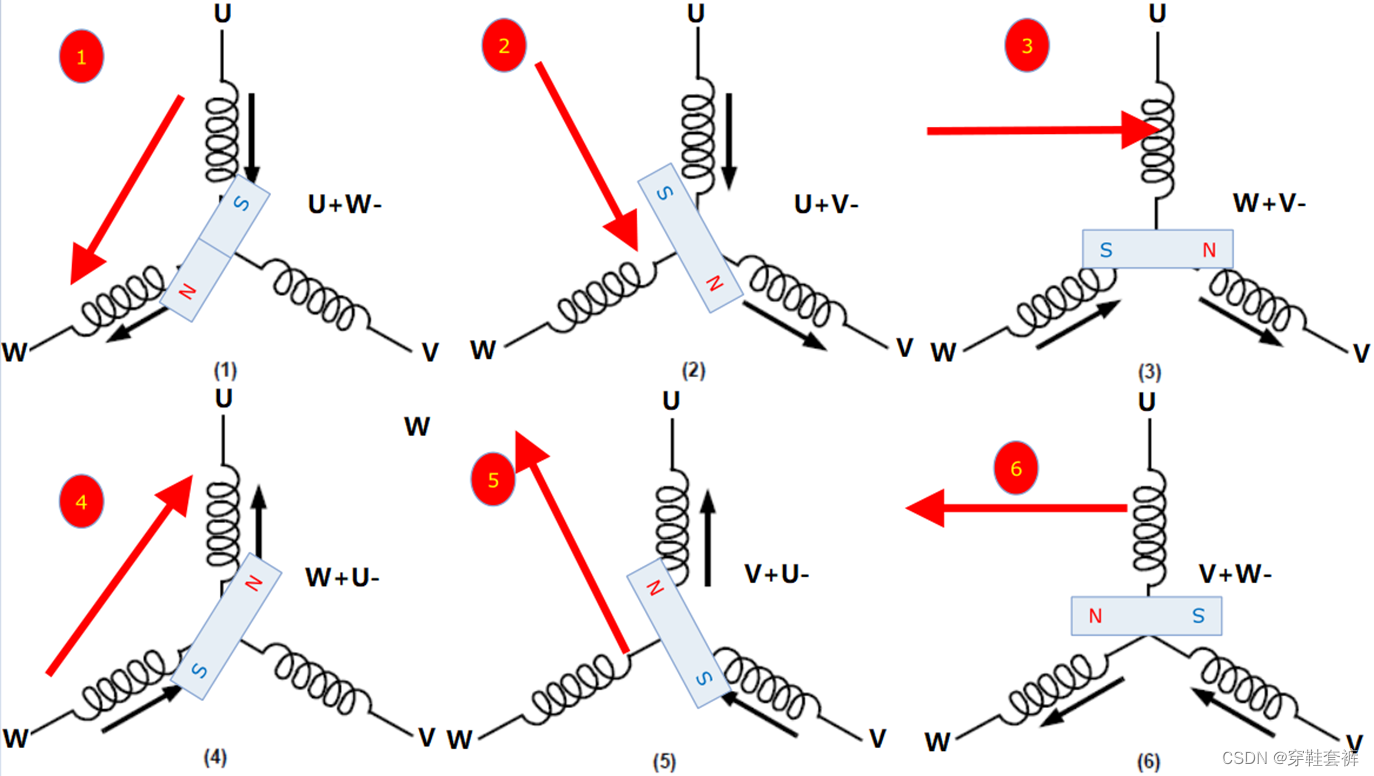
BLDC有感驱动-六步换向法
软硬件原理框图:
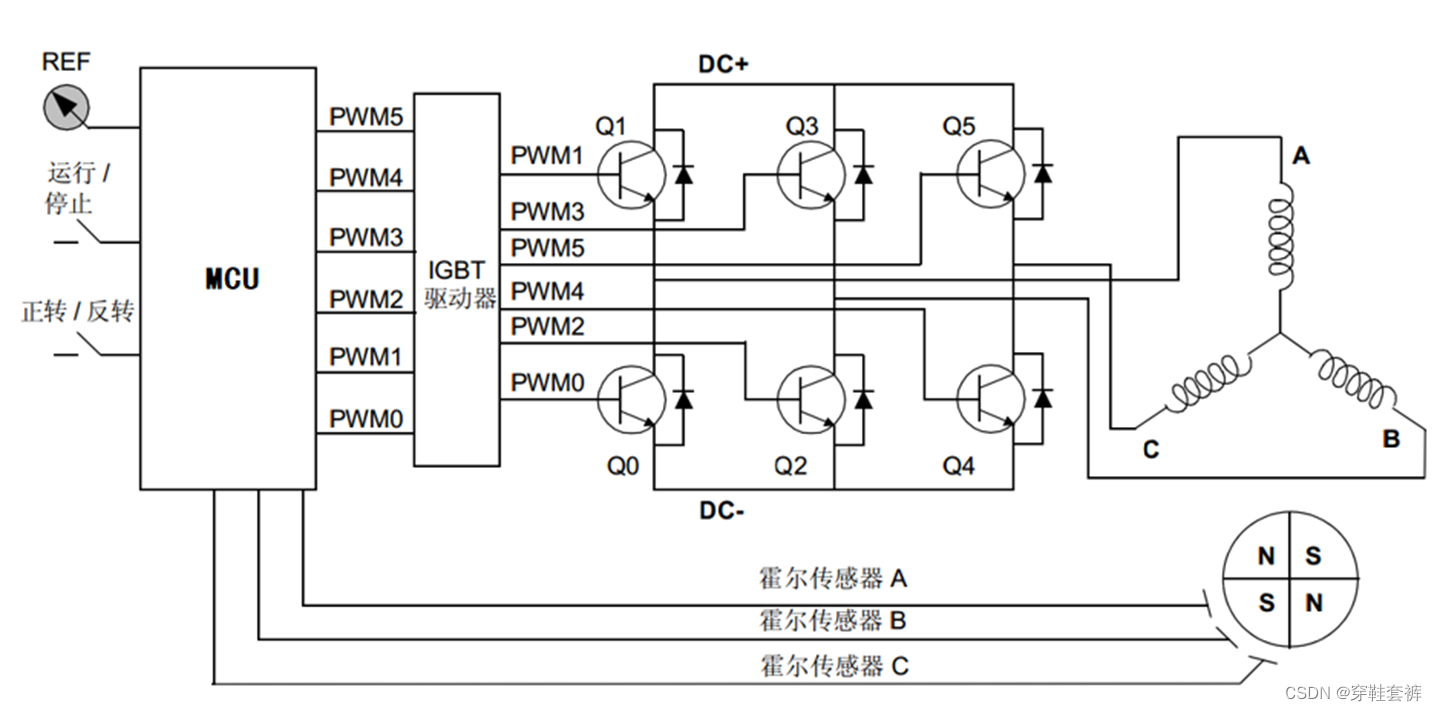
直流无刷电机驱动采用三相逆变电路来实现。
4.实现方法
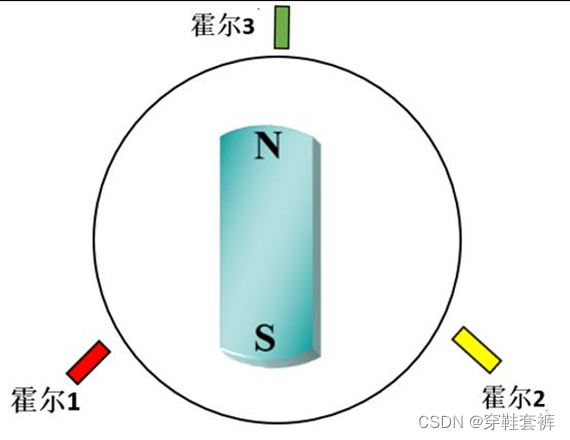
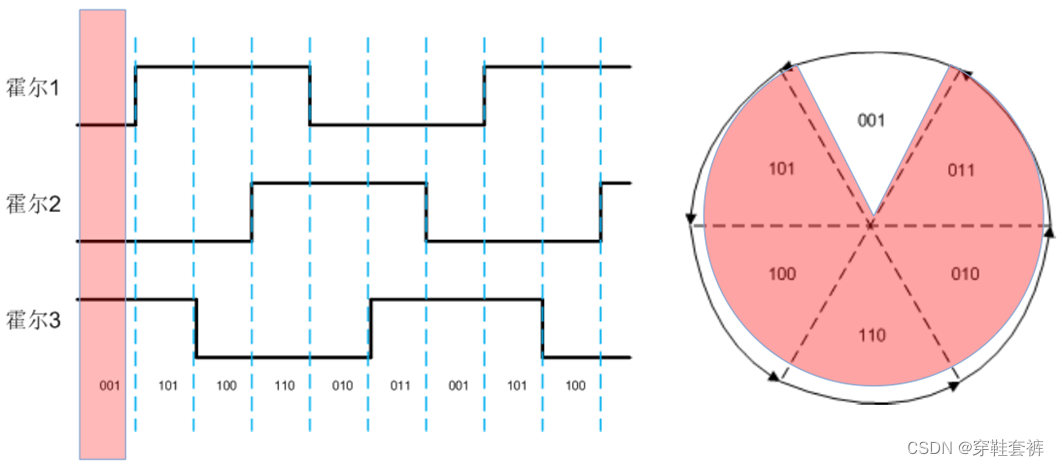
获取转子位置的方法:
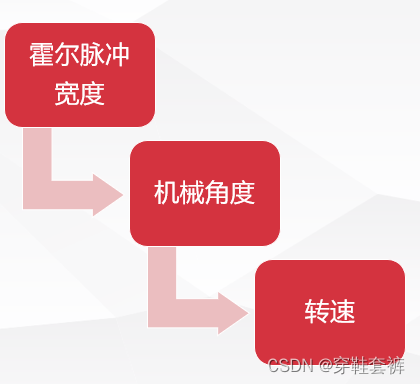
获取电机转速的方法:
依据一:转子旋转一圈,其机械角度转动360°,电角度转动极对数*360°,单个霍尔输出方波脉冲数等于极对数,占空比为50%;
依据二:霍尔脉冲宽度测量,即T = C / Ft (其中T为脉冲高电平时间宽度,单位为秒,Ft 是脉冲的高电平检测频率,C为计数次数);
依据三:转速的单位为rpm(每分钟转的圈数),当电机的极对数为2时,每圈输出两个霍尔脉冲,因此转速R=1/4T*60=(Ft*60)/(4*C)。
位置和速度PID闭环控制实现方法:
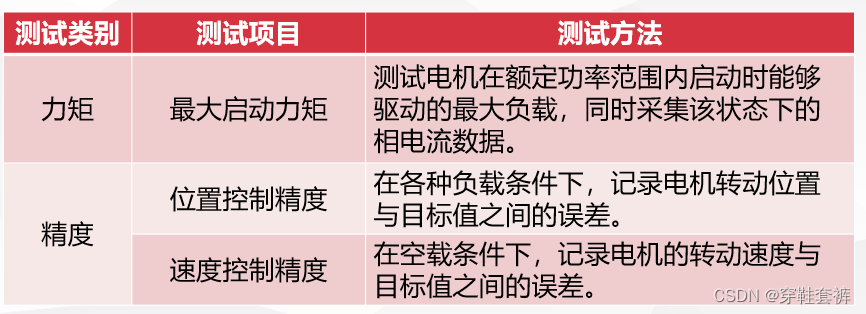
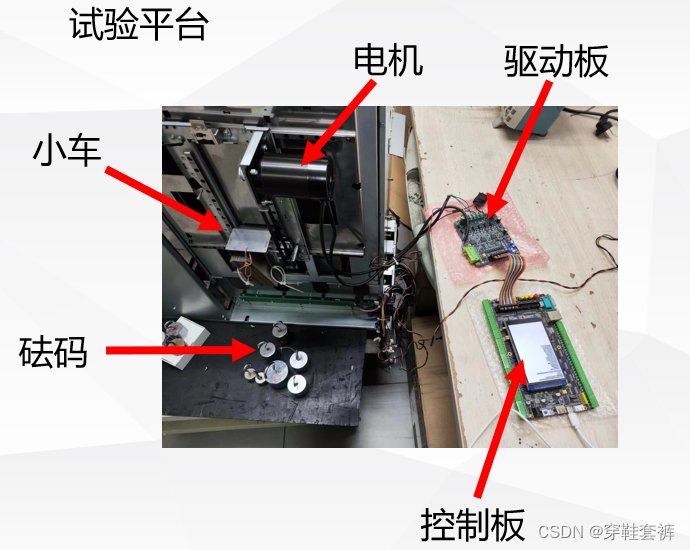
5.效果测试
测试平台:
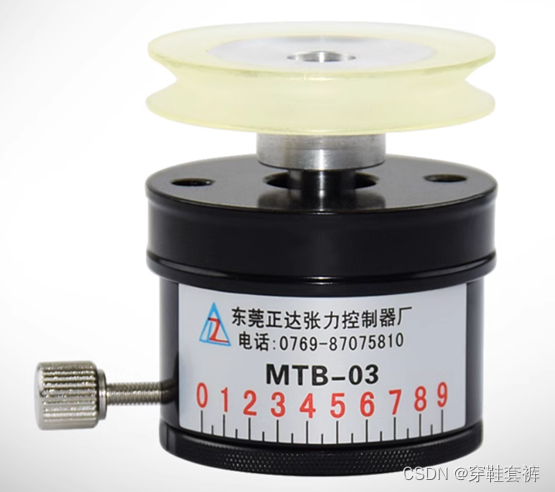
电机扭力测试装置:
采用下图中的这种张力控制器作为扭力测试的负载,可评估电机动态负载的能力。
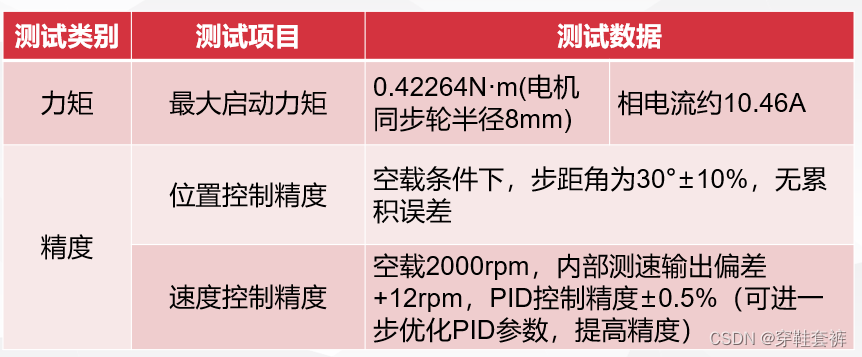
测试数据:
6.初步结论
结论一: BLDC直流无刷电机额定转速比步进电机高,一般可在2000-3500rpm的区间内以较高效率(大于60%)运行;
结论二:BLDC采用有感方波驱动,加上位置和速度串联PID控制,可以实现转动位置的控制,且控制方法相对简单,占用的资源少,可移植到大部分嵌入式平台;
结论三:BLDC可在高转速下(大于2000)输出较大的扭矩(与电机的额定扭矩相比),且可以在短时间内过载运行,但是位置控制的精度不高,结合这个特点,可在BLDC电机上增加减速装置,可运用在大扭矩、中低精度的场景。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









