









RobotStudio 6-1
MODULE MainModule
CONST jointtarget jpos10:=[[0,0,0,0,90,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget pick:=[[170.70,-456.11,152.23],[1.45105E-7,-0.000327413,1,8.42526E-8],[-1,0,-1,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
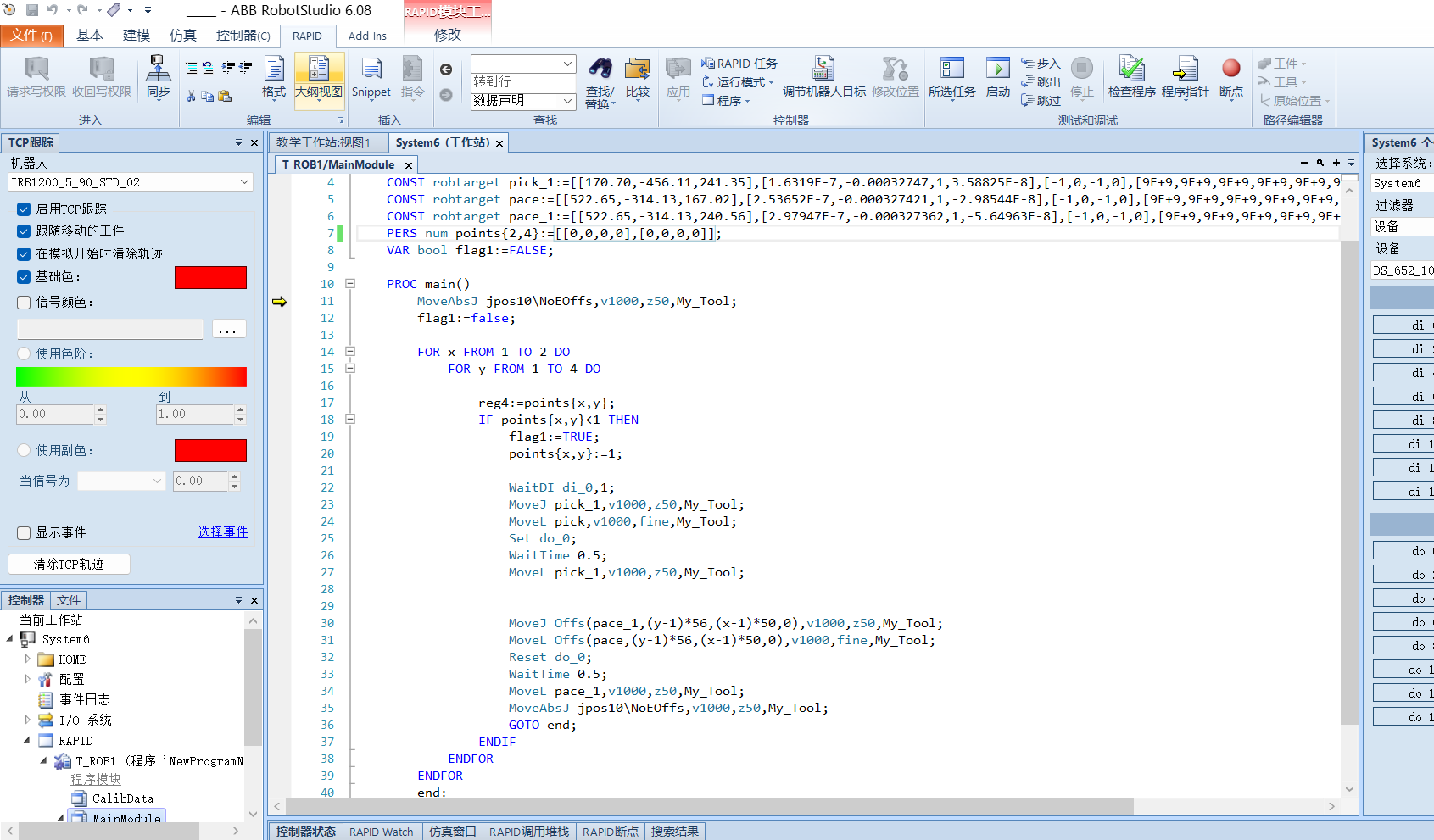
CONST robtarget pick_1:=[[170.70,-456.11,241.35],[1.6319E-7,-0.00032747,1,3.58825E-8],[-1,0,-1,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST robtarget pace:=[[522.65,-314.13,167.02],[2.53652E-7,-0.000327421,1,-2.98544E-8],[-1,0,-1,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST robtarget pace_1:=[[522.65,-314.13,240.56],[2.97947E-7,-0.000327362,1,-5.64963E-8],[-1,0,-1,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
var num points{2,4}:=[[0,0,0,0],[0,0,0,0]];
VAR bool flag1:=FALSE;
VAR bool flag2:=FALSE;
VAR bool flag3{2,4}:=[[FALSE,FALSE,FALSE,FALSE],[FALSE,FALSE,FALSE,FALSE]];
PROC main()
MoveAbsJ jpos10\NoEOffs,v1000,z50,My_Tool;
flag1:=false;
IF di_1 = 1 THEN
ENDIF
FOR x FROM 1 TO 2 DO
FOR y FROM 1 TO 4 DO
reg4:=points{x,y};
IF points{x,y}<1 THEN
flag1:=TRUE;
points{x,y}:=1;
WaitDI di_0,1;
MoveJ pick_1,v1000,z50,My_Tool;
MoveL pick,v1000,fine,My_Tool;
Set do_0;
WaitTime 0.5;
MoveL pick_1,v1000,z50,My_Tool;
MoveJ Offs(pace_1,(y-1)*56,(x-1)*50,0),v1000,z50,My_Tool;
MoveL Offs(pace,(y-1)*56,(x-1)*50,0),v1000,fine,My_Tool;
Reset do_0;
WaitTime 0.5;
MoveL Offs(pace_1,(y-1)*56,(x-1)*50,0),v1000,z50,My_Tool;
MoveAbsJ jpos10\NoEOffs,v1000,z50,My_Tool;
GOTO end;
ENDIF
ENDFOR
ENDFOR
end:
ENDPROC
ENDMODULE


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









