






Carsim simulink 联合 多目标优化MPC,模型预测
ACC模型预测ACC设计 自适应巡航
考虑经济性,安全性,动力行等多因素的
不是单纯的速度跟踪
carsim与simulink联合仿真
包括动力模型,逆制动模型,跟车模型,紧急制动模型,基于mpc算法的全速自适应巡航,或者stateflow的ACC,
默认是油车模型
参考硕士毕业论文
不是mpc工具箱
ID:1296669892207380
智驾小崔cyj
Carsim simulink 联合 多目标优化MPC,模型预测
在汽车驾驶辅助系统领域,为了提高行驶的经济性、安全性和动力性等因素,研究人员一直在探索各种方法和技术。其中,ACC(自适应巡航控制系统)是一种较为成熟的技术,在实现车辆跟车行驶时能够保持与前车的安全距离,并根据前车的速度自适应地调整车辆的速度。
然而,传统的ACC系统仅仅是单纯的速度跟踪,无法综合考虑多个因素对驾驶过程的影响。为了实现更加智能的ACC系统,研究人员开始尝试使用Carsim和Simulink两个软件的联合仿真方法,并结合多目标优化MPC(模型预测控制)技术。
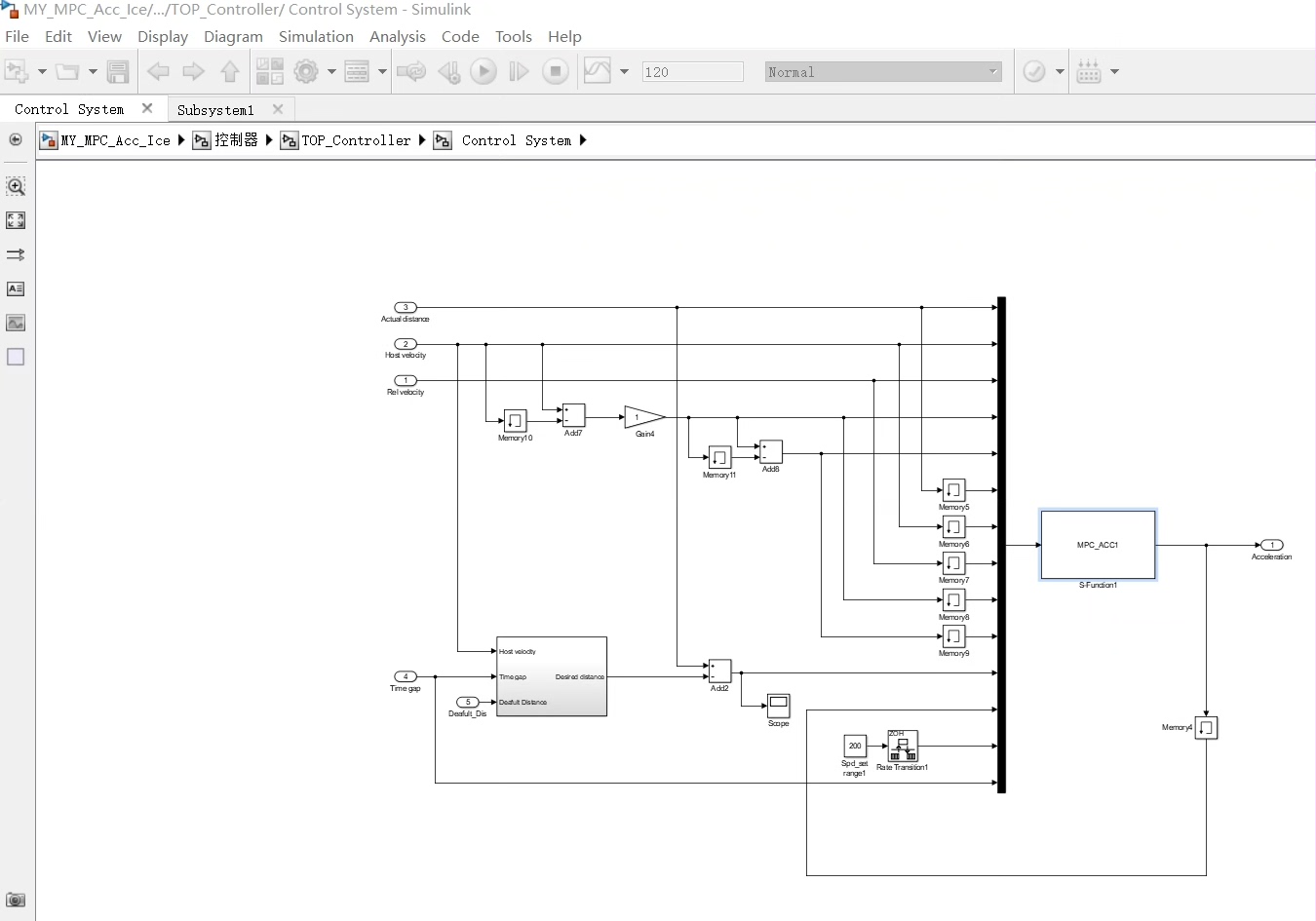
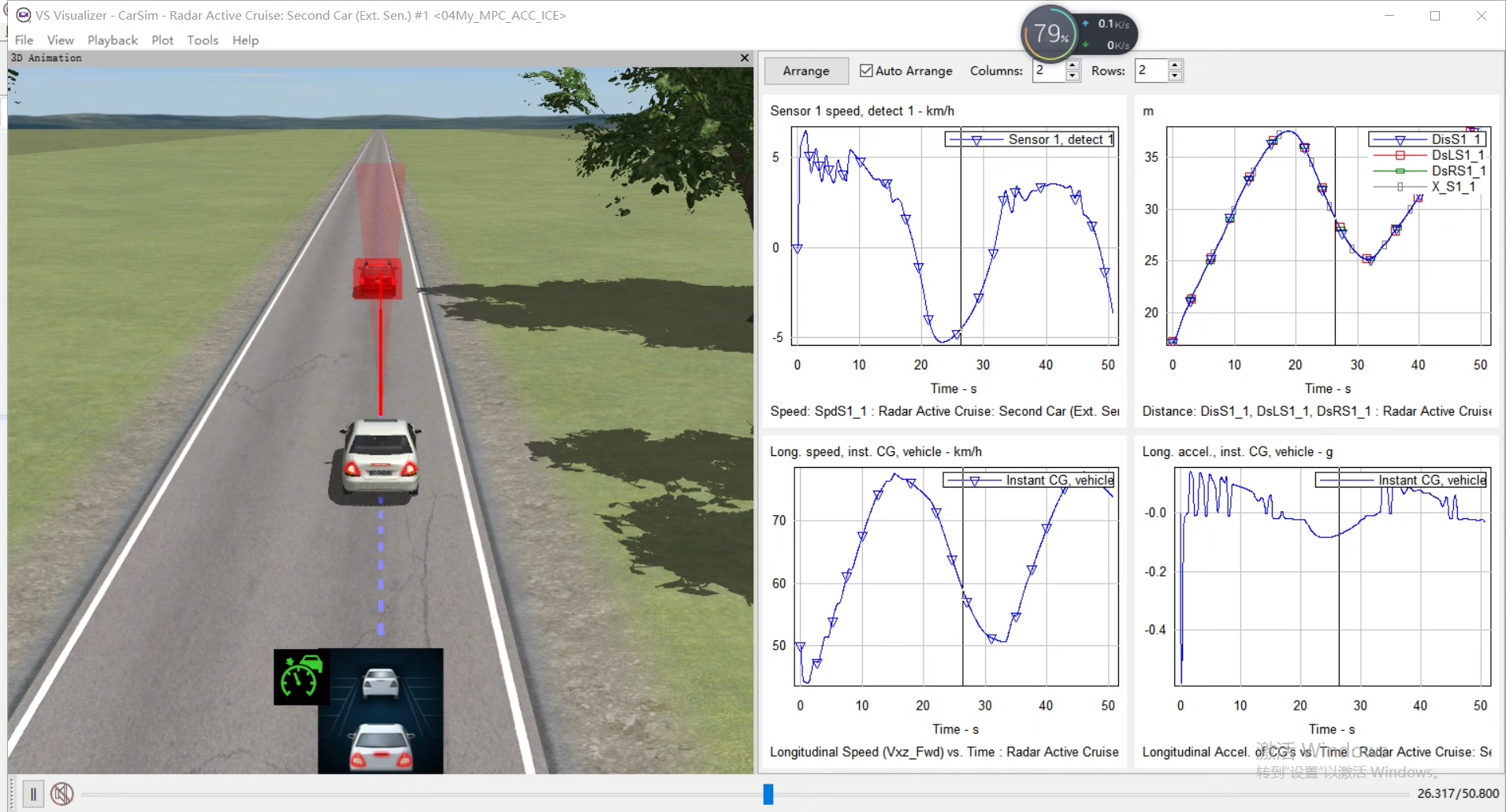
首先,通过Carsim实现了车辆的动力模型、逆制动模型、跟车模型和紧急制动模型等。这些模型能够准确地描述车辆在不同驾驶条件下的行驶特性,为后续的仿真和优化提供了基础。
接着,在Simulink中使用MPC算法来实现全速自适应巡航。MPC算法是一种基于模型预测的控制方法,通过对车辆行驶过程中的多个因素进行建模和优化,以实现对车辆速度的自适应调节。与传统的PID控制相比,MPC能够更好地满足多目标优化的需求,提高ACC系统的性能。
需要注意的是,本文提供的方法并非使用MPC工具箱,而是自行实现的MPC算法。通过Carsim simulink联合仿真,结合多目标优化MPC技术,可以在ACC系统中考虑经济性、安全性和动力性等多个因素,提升系统的性能。
最后,我们还可以通过引入Stateflow技术来进一步完善ACC系统。Stateflow是一种建模和仿真工具,能够对系统的状态和事件进行建模和控制。在ACC系统中,Stateflow可以用于实现更加复杂的决策逻辑和控制策略,提高系统的稳定性和可靠性。
需要指出的是,本文提供的方法和技术可以作为参考,但并非独一无二的解决方案。在实际应用中,需要根据具体的驾驶场景和需求,对ACC系统进行相应的改进和优化。
综上所述,使用Carsim simulink联合多目标优化MPC技术,结合模型预测和自适应巡航,可以实现更加智能和高效的ACC系统。通过综合考虑经济性、安全性和动力性等多个因素,使得ACC系统能够更好地满足驾驶员的需求,提升整体的行驶体验。
相关的代码,程序地址如下:http://wekup.cn/669892207380.html
















 4256
4256

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









