







1、旋转步进电机
旋转步进电机就是电机是一步一步转动的,故叫旋转步进电动机。每输入一个脉冲冲信号,该电动机就转过一定的角度,因此旋转步进电机是一种把脉冲变为角度位移的执行元件。 可通过脉冲频率控制步进电机的旋转速度,通过脉冲个数控制电机的位置。

2、直线步进电动机(丝杆步进电机)
直线步进电动机可以直接输出直线位移,称为直线电机。因此步进电动机是一种把脉冲变为直线位移的执行元件。 亦可以实现精确定位和控制运行速度的功能
二、步进电机基本参数
混合式步进电机结合了永磁式步进电机和反应式步进电机的优点。目前常用的有二相步进电机、三相步进电机、五相步进电机:两相步进电机步进角一般为1.8度和0.9度,三相步进电机步距角为1.2度,五相步进电机步进角一般为 0.72度。
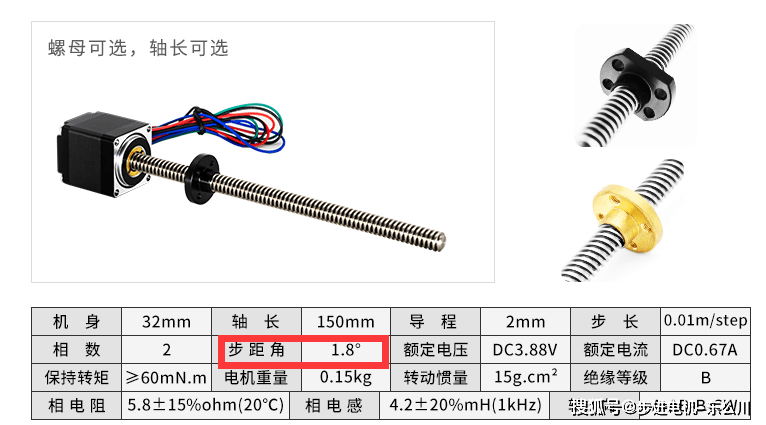
1、什么是步进电机固有步距角:
它表示控制系统每发一个步进脉冲信号,步进电机所转动的角度。步进电机出厂时给出了一个步距角的值,如上图电机给出的值为步距角是1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为‘步进电机固有步距角’,它不一定是电机实际工作时的真正“步距角“,真正的“步距角“和步进电机驱动器细分有关。
2、什么是步进电机的相数:
是指步进电机内部的线圈组数,目前常用的有二相、三相、五相步进电机,相数不同,其步距角也不同,一般二相步进电机的步距角为0.9°/1.8°、三相步进电机的为1.2°、五相步进电机的为0.72° 。在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己对步距角的要求。如果使用步进电机细分驱动器,则“相数“将变得没有意义,用户只需在步进电机驱动器上改变细分数,就可以改变脉冲当量。即指的是一个脉冲电机转动的角度。
3、什么是步进电机细分
细分是驱动器将上位机发出的每个脉冲按驱动器设定的细分倍数后对电机进行控制。简单的说,就是在电机的步距角按照细分倍率进行缩小。比如1.8°步距角的步进电机,驱动器细分设置为32,则脉冲当量1.8°/32=0.05625°。或者也可以理解为每转一圈为200个脉冲,细分为32,那么步进电机驱动器需要输出200*32=6400个脉冲步进电机才转一圈。
通常细分有2、4、8、16、32、64、128、256、普通场景应用下建议细设置在10000左右即可,细分主要是改善电机的运行性能,使步进电机运行更平稳,噪音更小。

4、保持转矩(HOLDING TORQUE):
是指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。比如,当人们说1N.m的步进电机,在没有特殊说明的情况下是指保持转矩为1N.m的步进电机。
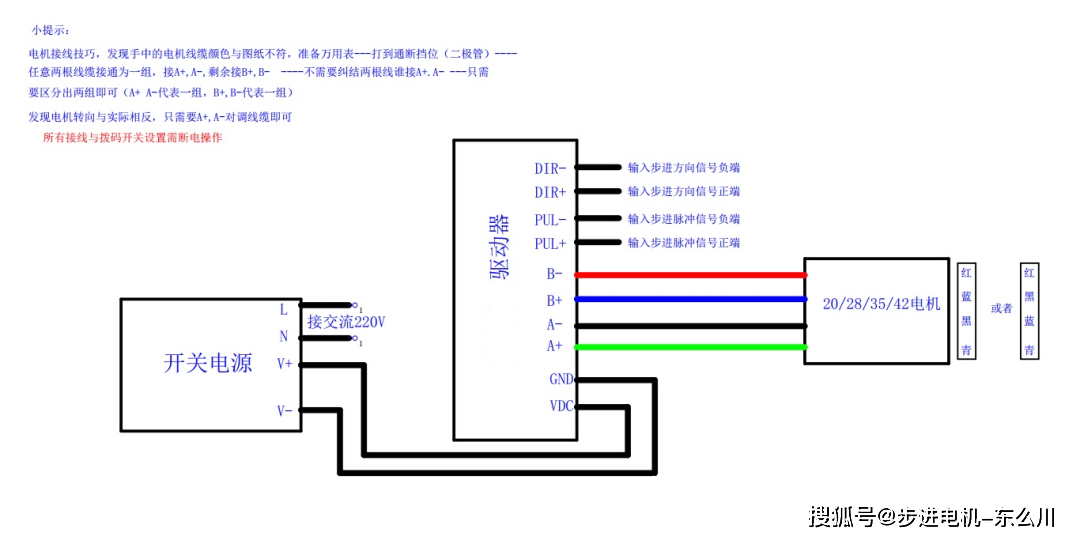
两相步进电机接线方式介绍
一般情况下,我们步进电机的图纸上会标注好出线的颜色以及那两条出线为一组,有图纸的情况下按照图纸即可完成接线。在没有图纸的情况下,我们需要用到万用表,用万用表打一下任意两条线路通断即可,相通的一组为一相 不分正负 另外一组为一相 不区分AB,任意一相接到A+和A-另外一相接入B+和B-,连万用表都没有的条件下,把步进电机出线的任意两条线相互接在一起 拧动电机轴 比较紧的话 该两条线就是一组,反之继续换一条线和之前的任意一条接在一起试一试。很快便能得出结果。
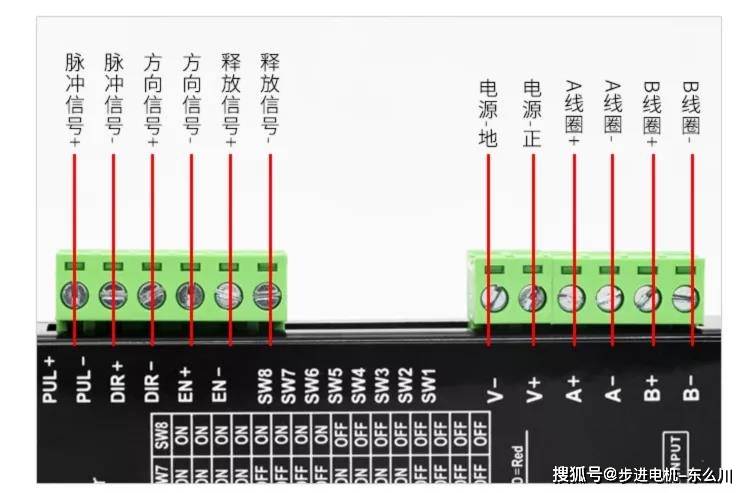
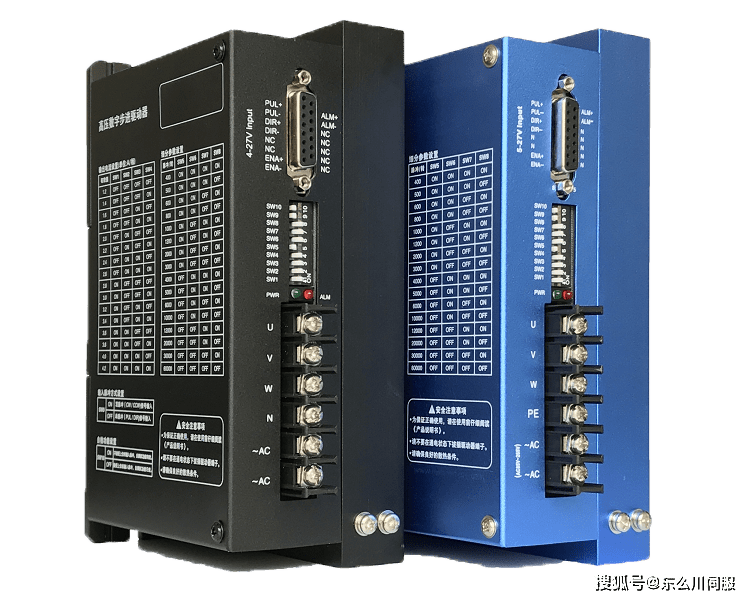
步进电动机的驱动器 : 步进电动机需配置一个专用的驱动电源供电(下面驱动电源简称驱动器),驱动器的作用是让电动机的控制绕组按照特定的顺序通电,即受输入的电脉冲控制而动作。步进电动机及其驱动器是一个互相联系的整体,步进电动机的运行性能是由电动机和驱动电器两者配合所形成的综合效果。
1、对驱动器的基本要求
(1)驱动电源的相数、通电方式和电压、电流都工满足步进电动机的需要;
(2)要满足步进电动机的起动频率和运行频率的要求;
(3)能最大限度地抑制步进电动机的振荡和噪音;
(4)工作可靠,抗干扰能力强;
(5)成本低、效率高、安装和维护方便。
步进电机性能除了电机本体外,还会根据驱动方式和控制方法不同而受到很大影响。步进电机的驱动方式又分为整步、半步、细分驱动等模式,那么步进电机整步半步什么意思呢?下面就让小编为您讲解一下: 步进电机驱动器的三种基本驱动模式:整步、半步、细分驱动。
一、整步驱动
在整步驱动时,步进电机驱动器按脉冲/方向指令对两相步进电机的两个线圈循环激磁(即将线圈充电设定电流),这种驱动方式的每个脉冲将使电机移动一个基本步距角,即1.80度 (标准两相电机的一圈共有200个步距角)。下图是整步驱动方式的电机定子电流次序示意图:

整步驱动每一步只有一相通电,整步驱动相序如下:BB'→A'A→B'B→AA'→BB'。
下图是整步驱动方式的电流矢量分割图: 下图是整步驱动方式的A、B相的电流I vs T图: 观察发现,整步驱动方式的电流矢量把一个圆平均分割成四份,整步驱动的电流波形比较粗糙的。使用这种驱动方式,电机低速时会抖动,噪声也比较大。但是,这种驱动方式的优点是无论在硬件或软件上都是相对简单,从而驱动器制造成本容易得到控制。
二、半步驱动
在单相激磁时,电机转轴停至整步位置上,驱动器收到下一脉冲后,如给另一相激磁且保持原来相继处在激磁状态,则电机转轴将移动半个步距角,停在相邻两个整步位置的中间。如此循环地对两相线圈进行单相然后双相激磁步进电机将以每个脉冲0.90度的半步方式转动。和整步方式相比,半步方式具有精度高一倍和低速运行时振动较小的优点。 下图是半步驱动方式的电机定子电流次序示意图:
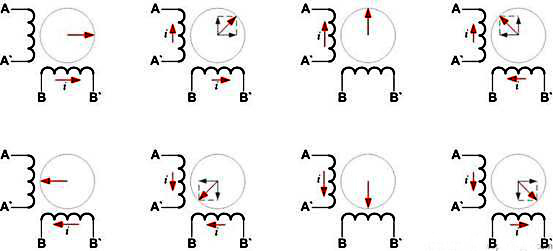
半步驱动方式比整步驱动方式相对复杂一些,在同一时刻,可能两个相都需要通电,通电电流应该为单相通电电流的√2/2。当然,也可以直接通与单相电流相等的电流,结果是电机转动过程中的力矩不恒定,但它带来的好处是简化驱动电路或软件编写。 半步驱动方式的驱动相序如下:BB'→BB'& A'A→A'A→B'B & A'A→ B'B→B'B & AA'→AA'→ AA'& BB'。按以上相序对电机通电,产生的电流矢量则可以把一个圆分割成8份。 半步驱动电流矢量如下图所示: 半步驱动方式的两相电流图如下图所示: 由上图可知,半步驱动时,描出的电流波形较整步驱动方式,有了很大改观,电流波形更平滑。对比整步驱动,电机的步进角分辨率提高了一倍,且电机运行更平稳,更安静。
三、细分驱动
细分驱动是将全部驱动时的各相的电流以阶梯状n步逐渐增加,使吸引转子的力慢慢改变,每次转子在该力的平衡点静止,将步距角作n个细分,可使转子运转效果光滑,因此,在低速运转时,此法可认为是降低振动的有效方法之一。 对比下图,可以看出某种规律:细分越多,电流矢量分割圆越来越稠密。

如上图的c,这是4细分驱动的分割图。从某种意义上,整步和半步驱动也是细分驱动的一样,它们的关系就如正方形和长方形的关系。 上图是4细分驱动方式的两相电流图,由图看出,这时每相电流的曲线较半步驱动时的电流曲线更加细腻,近似正弦波。
细分驱动方式是降低振动极为有效的方法,但是有以下要点需要注意: • 细分驱动在低速运行时效果越好,如果输入频率太快,对细分波形来说,由于不能得到希望的电流波形,会使电机跟踪精度变差。 • 理论上细分数越多,降低振动的效果越明显,但实际到8细分是效果变化并不大。通过实际测试不同细分数的电流波形和电机转动角,我们发现8细分与16细分以上不会有效果的差别。 • 细分的角度虽然能定位,但其精度不高,因此定位控制时,用细分的2相或1相导通方式来定位。















 4596
4596











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









