






前天跟轨道交通信号领域的专家交流,他提到一个概念“故障导向安全”-Fail Safe,就是当故障发生时,做出的反应动作是导向安全的。
比如在地铁和高铁这种轨道交通领域,就需要降速,甚至是立即制动停车。
这一点跟互联网系统就有一些区别,互联网业务系统是允许失败,会以关键指标的成功率代表可用性,出了故障只要能快速恢复就可以。
而且在效率和成本面前,是允许牺牲一部分稳定性和安全性的,甚至是一定的资损。
这一点在人命关天的轨道交通领域就无法接受,一定是安全高于一切。
我这个朋友就告诉我说,这个领域就一个原则,不能撞。
不过,也一个例外,就是现在的电动车领域,汽车作为一个大规模量产的消费级产品,对成本非常敏感,大家都在卷价格,卷交付效率,所以现在这个领域在成本和安全的融合上说不清道不明。
这个“故障导向安全”的原则下,他给我说了这个领域里系统的两个关键设计原则,挺有意思的,第一次听说,所以分享一下:
1、默认故障策略:
系统对不确定性的处理往往会采取“默认危险状态”的保守策略,即当无法明确判断当前是否安全时,系统会优先假定存在危险,并通过后续条件逐步验证是否能够解除这种假设。
这种逻辑在障碍物检测、信号判断、设备控制等场景中非常常见。以下是DeepSeek的回答,大致是这么个意思,比我自己总结要更专业,所以直接引用了。
核心逻辑:宁可误判,不可冒险
“默认危险”假设:当传感器失效、数据矛盾或计算超时时,系统会假设存在危险(如前方有障碍物、轨道被占用)。
例如:自动驾驶汽车在摄像头被强光干扰时,默认前方有障碍物并启动制动。
“白名单”思维:只有通过严格的验证条件(如多传感器一致确认、逻辑条件全满足),系统才会解除危险假设,允许正常运行。
例如:地铁信号系统必须同时满足“轨道空闲+道岔锁闭+信号灯正常”才会开放绿灯。
DeepSeek的回答
这个原则落到具体实现里,就是系统在判断一个场景是否有故障时,默认为有故障,代码里的默认返回值就是True(有故障),然后通过一些列严格条件判断通过后,才会置为False(无故障),这样出现任何异常状况或者意想不到的状况没有走到分支流程,都会返回故障状态。
2、二取二 或 三取二冗余表决(2 out of 2 \ 2 out of 3)
接上面逻辑,无故障的判断也要遵从非常严格的逻辑,其中一个就是系统层面的冗余表决机制。
简单讲就是:两套系统,不同传感器,不同软件系统(相同逻辑,但是不同语言实现),异构操作系统,异构服务器(芯片异构),在相同输入的情况下,两套系统判断结果一致,才算生效。
比如在2oo2设计里,判断前方是否有障碍物,得两套系统同时判断为否,才算安全,只要有一个系统判断不成立,就默认为有障碍物,这时候就要采取对应的安全措施,比如降速继续观察,或者直接制动停车。
这有点像对同一件事情,如果2个或更多人持有相同观点,这个事情的可信度就会更高。
IEC 61508《电气/电子/可编程电子安全相关系统的功能安全性》国际标准里用MooN来表示,M表示输出,oo表示out of,N表示通道个数,D代表诊断。
“二取二”逻辑(2oo2),通过双通道冗余与严格一致性表决,确保系统故障时自动导向安全状态。系统结构是两个完全独立的硬件/软件通道(A/B),物理隔离供电,消除共因故障。每个通道独立接收相同输入信号,并行执行相同的控制逻辑运算,外部输入(如传感器信号)同时分发至双通道,双通道基于输入独立生成输出结果,互不干扰,通过专用硬件比较器或软件校验模块,对两通道输出进行逐周期比对。结果一致,输出有效控制指令(如列车加速、轨道信号开放)。不一致,立即切断执行链路,强制系统进入预设安全状态(如紧急制动、信号红灯)。典型场景:铁路信号系统、核电站反应堆紧急停堆保护、航空航天,如火箭点火。
DeepSeek的回答
2oo2的逻辑因为过于严格,这样当其中一个系统出现故障的时候,就会导致业务中断(比如停车),虽然不会造成安全事故,但是还是会影响到系统正常运行。
而且这个逻辑如果放到飞机上就不可行了,因为飞机飞在天上不可能随时停机不飞,这是不现实的,所以就出现了2oo3,三取二的逻辑,就是三套冗余系统,其中两套运行正常,且其中两套得到的结果是一致的,就认为结果可信。
所以在航空航天领域会从“故障导向安全 Fail Safe” 策略转变为“故障可运行 Fail Operational”,通过更多的冗余确保安全可运行。
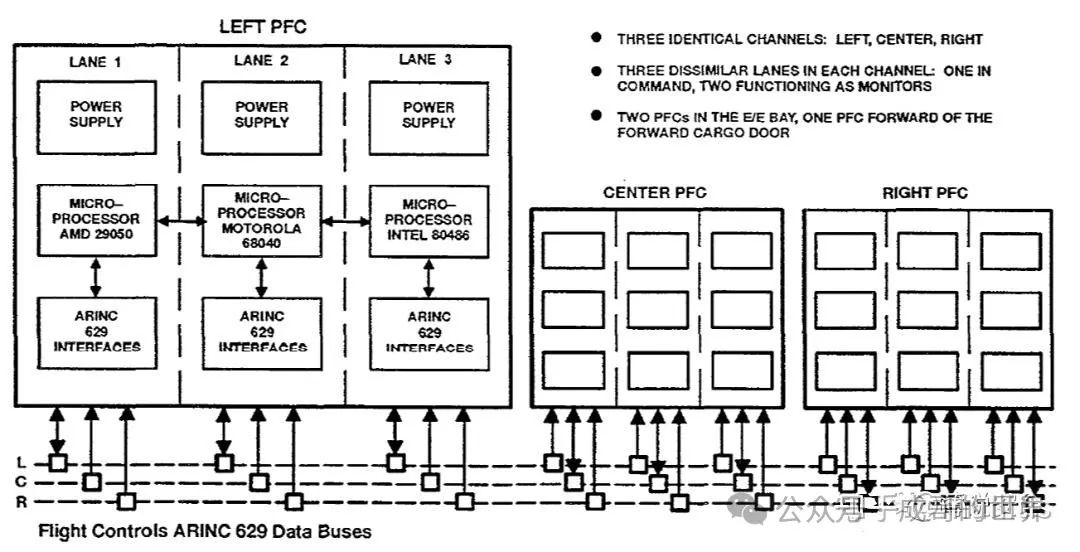
比如波音777飞控计算机的三重冗余架构,每一个处理单元的电源、处理器、通信总线都是完全独立,整体冗余备份了三套,以此来达到故障可运行的目标。
最后,整个系统设计,软件只是一部分,还要结合硬件、管理、人员培训等等一系列措施来满足“故障导向安全”的原则。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









