









强化学习:机器学习新赛道
在机器学习的广阔领域中,强化学习犹如一颗璀璨的新星,正逐渐崭露头角,吸引着无数研究者和开发者的目光。它与传统的监督学习、无监督学习共同构成了机器学习的三大支柱 ,却又以其独特的学习方式和应用场景,在机器学习领域中独树一帜。
监督学习依赖于大量有标记的数据进行模型训练,就像是在老师的悉心指导下学习知识,目标是根据已知的输入输出关系进行准确的预测或分类;无监督学习则致力于从未标记的数据中挖掘隐藏的模式和结构,如同在未知的领域中自主探索奥秘。而强化学习,更像是一位勇敢的探险家,在不断与环境的交互中,通过试错来学习如何做出最优决策,以最大化长期累积的奖励 。这种独特的学习方式,使得强化学习在处理复杂的动态系统和决策问题时,展现出了强大的优势和潜力,为机器学习开辟了一条全新的赛道。
强化学习核心探秘
基本原理剖析
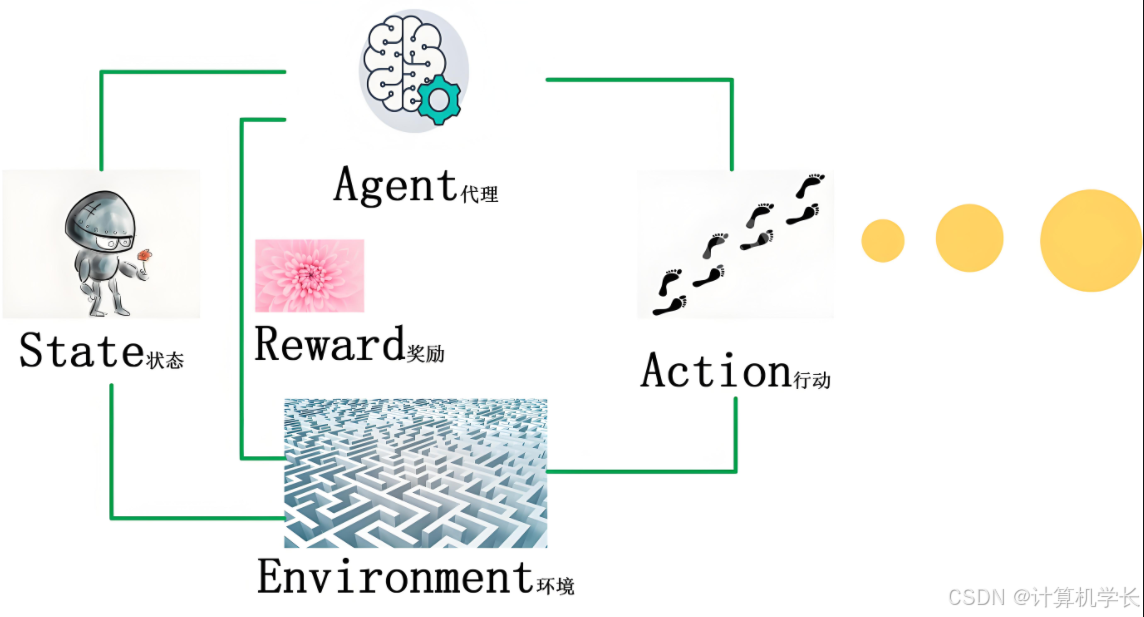
强化学习的基本原理基于智能体(Agent)与环境(Environment)的交互。智能体在环境中感知当前状态(State),根据一定的策略(Policy)选择并执行动作(Action),环境则根据智能体的动作反馈一个奖励(Reward),并转移到新的状态。智能体的目标是通过不断地与环境交互,学习到一个最优策略,使得长期累积的奖励最大化 。这就好比一个孩子在探索世界的过程中,每做一件事都会得到相应的反馈,是被表扬(正奖励)还是被批评(负奖励),孩子会根据这些反馈不断调整自己的行为,以获得更多的表扬,也就是最大化奖励。在这个过程中,智能体需要在探索新动作以获取更多信息和利用已知的高奖励动作之间进行平衡,这是强化学习的一个关键挑战。
关键要素详解
- 状态(State):描述智能体在环境中所处的状况,是智能体做出决策的依据。例如在自动驾驶场景中,车辆的位置、速度、周围车辆的信息等都构成了状态。状态可以是离散的,如游戏中的不同关卡;也可以是连续的,如机器人在空间中的位置坐标。
- 动作(Action):智能体在当前状态下可以采取的操作。在自动驾驶中,加速、减速、转弯等就是车辆可以执行的动作。动作空间同样可以是离散或连续的,离散动作空间如围棋中的落子位置选择,连续动作空间如机器人关节的角度调整。
- 奖励(Reward):环境对智能体动作的反馈,是智能体学习的驱动力。奖励可以是即时的,也可以是延迟的。比如在游戏中,吃掉一个道具会立即获得一定分数(即时奖励),而赢得一局游戏则获得更大的奖励(延迟奖励)。智能体的目标就是最大化长期累积奖励,这意味着它需要考虑当前动作对未来奖励的影响。
- 策略(Policy):决定智能体在每个状态下选择何种动作的规则。策略可以是确定性的,即给定状态下动作是唯一确定的;也可以是随机性的,根据一定的概率分布选择动作。例如在简单的迷宫游戏中,确定性策略可能是 “一直向右走”,而随机性策略则可能是以一定概率向右走,以其他概率尝试其他方向。
- 价值函数(Value Function):用于评估状态或状态 - 动作对的优劣程度。状态价值函数\(V(s)\)表示从状态 s 开始,遵循最优策略时智能体所能获得的期望累积奖励;动作价值函数\(Q(s,a)\)表示在状态 s 下执行动作 a 后,遵循最优策略所能获得的期望累积奖励。价值函数为智能体提供了一种衡量不同决策价值的方式,帮助它选择最优策略 。
这些关键要素相互关联,构成了强化学习的基础框架。智能体通过策略选择动作,动作导致环境状态的变化和奖励的反馈,价值函数则评估这些决策的长期影响,从而指导策略的优化。
核心算法巡礼
Q - learning 算法
Q - learning 是一种经典的基于值迭代的强化学习算法,其核心思想是通过学习状态 - 动作值函数(Q 值函数)来寻找最优策略。Q 值函数\(Q(s,a)\)表示智能体在状态 s 下选择动作 a 并按照最优策略执行后,能够获得的累积奖励的期望值。
Q - learning 的更新公式基于贝尔曼最优方程:\(Q(s,a) \leftarrow Q(s,a) + \alpha \left[ R + \gamma \max_{a'} Q(s',a') - Q(s,a) \right]\)
其中,\(\alpha\)是学习率,控制每次更新的步长;\(\gamma\)是折扣因子,取值范围为\([0,1]\),用于衡量未来奖励的重要性,\(\gamma\)越接近 1,表示智能体越关注未来奖励;\(R\)是执行动作 a 后获得的即时奖励;\(s'\)是执行动作 a 后转移到的新状态;\(\max_{a'} Q(s',a')\)表示在新状态\(s'\)下能够获得的最大 Q 值 。
在实际应用中,Q - learning 通过不断迭代更新 Q 值表,逐渐逼近最优的 Q 值函数。智能体在每个状态下选择具有最大 Q 值的动作,随着学习的进行,Q 值表会收敛到最优策略。例如在一个简单的网格世界中,智能体需要从起点到达终点,每次移动到新的位置都会获得相应的奖励或惩罚,通过 Q - learning 算法,智能体可以学习到从任意位置到达终点的最优路径 。
深度 Q 网络(DQN)
当状态空间和动作空间非常大时,传统的 Q - learning 使用 Q 值表来存储和更新 Q 值变得不可行。深度 Q 网络(DQN)则将深度神经网络与 Q - learning 相结合,利用神经网络强大的函数逼近能力来近似 Q 值函数,从而解决高维状态空间的问题。
DQN 的主要步骤如下:
- 初始化神经网络:用于近似动作值函数 Q (s,a),网络的输入为状态 s,输出为每个动作 a 对应的 Q 值。
- 初始化经验回放缓存:用于存储智能体与环境交互的经验,包括状态、动作、奖励和下一状态等信息。经验回放缓存打破了数据之间的相关性,提高了训练的稳定性和效率。
- 初始化目标网络参数:DQN 使用两个神经网络,一个是用于选择动作的策略网络,另一个是用于计算目标 Q 值的目标网络。目标网络的参数定期从策略网络中复制,以保持目标 Q 值的稳定性。
- 开始训练:在每个时间步,智能体根据当前策略选择动作并执行,获取环境反馈的奖励和新状态,将经验存储到经验回放缓存中。然后从缓存中随机抽取一批经验数据,用于更新神经网络的参数。通过最小化预测 Q 值与目标 Q 值之间的均方误差,来优化神经网络的权重 。
DQN 在 Atari 游戏等复杂场景中取得了显著的成果,展示了其在处理高维状态空间和连续动作空间问题上的强大能力 。
策略梯度算法
策略梯度算法与基于值函数的方法不同,它直接对策略进行优化,以最大化累积奖励的期望值。策略可以表示为一个参数化的函数\(\pi(a|s;\theta)\),其中\(\theta\)是策略的参数。
策略梯度算法的核心思想是使用梯度上升法来更新策略参数\(\theta\),使得在当前策略下的累积奖励期望值增加。具体来说,策略梯度的计算基于以下公式:\(\nabla_{\theta} J(\theta) \approx \frac{1}{N} \sum_{n=1}^{N} \sum_{t=1}^{T_n} \nabla_{\theta} \log \pi(a_{t}^n|s_{t}^n;\theta) R_{t}^n\)
其中,\(J(\theta)\)是策略\(\theta\)的目标函数,表示累积奖励的期望值;\(N\)是采样的轨迹数量;\(T_n\)是第 n 条轨迹的长度;\(s_{t}^n\)和\(a_{t}^n\)分别是第 n 条轨迹中第 t 个时间步的状态和动作;\(R_{t}^n\)是从第 t 个时间步开始的累积奖励 。
策略梯度算法通过计算策略参数的梯度,并根据梯度方向更新参数,使得策略逐渐朝着能够获得更高累积奖励的方向优化。与 Q - learning 等方法相比,策略梯度算法可以直接处理连续动作空间,并且在一些复杂任务中表现出更好的性能 。
Actor - Critic 算法
Actor - Critic 算法结合了策略梯度和价值函数两种方法的优点,通过引入一个价值函数(Critic)来辅助策略(Actor)的优化。
Actor 网络负责根据当前状态生成动作,它通过策略梯度方法来更新参数,以最大化累积奖励。Critic 网络则用于评估 Actor 网络生成的动作的价值,即估计状态价值函数\(V(s)\)或动作价值函数\(Q(s,a)\)。Critic 网络通过学习来最小化估计值与实际奖励之间的误差 。
具体来说,Actor - Critic 算法的更新过程如下:
- Actor 网络更新:根据当前状态\(s_t\),Actor 网络输出动作\(a_t\),并在环境中执行该动作,获得奖励\(r_t\)和新状态\(s_{t+1}\)。根据策略梯度公式,计算策略参数的梯度,并更新 Actor 网络的参数,以使得在当前状态下选择的动作能够获得更高的奖励。
Critic 网络更新:Critic 网络根据当前状态\(s_t\)和动作\(a_t\),估计动作的价值\(Q(s_t,a_t)\)或状态的价值\(V(s_t)\)。然后根据实际获得的奖励\(r_t\)和新状态\(s_{t+1}\)的价值估计\(V(s_{t+1})\),计算时间差分误差(TD Error):\(\delta_t = r_t + \gamma V(s_{t+1}) - V(s_t)\)
通过最小化 TD 误差来更新 Critic 网络的参数,使得其价值估计更加准确。
Actor - Critic 算法在许多复杂的强化学习任务中表现出色,它能够更有效地利用样本数据,加快学习速度,并且在处理连续动作空间和高维状态空间问题时具有较好的性能 。
强化学习的多领域应用
强化学习凭借其强大的决策优化能力,在众多领域中展现出了巨大的应用潜力,为解决复杂问题提供了新的思路和方法。下面将深入探讨强化学习在游戏、机器人、自动驾驶和推荐系统等领域的具体应用。
游戏领域:智能玩家崛起
在游戏领域,强化学习取得了令人瞩目的成就,其中 AlphaGo 无疑是最为经典的案例。AlphaGo 是由谷歌 DeepMind 公司开发的一款人工智能程序,它通过结合深度强化学习和蒙特卡洛树搜索算法,在围棋这一古老而复杂的游戏中展现出了超越人类的实力 。
围棋具有极其庞大的状态空间和复杂的策略,被认为是人工智能领域的一个重大挑战。AlphaGo 通过自我对弈进行训练,在每一局对弈中,智能体根据当前棋局状态选择落子位置,通过不断地试错和学习,逐渐掌握了围棋的精妙策略。在与人类棋手的对弈中,AlphaGo 展现出了惊人的实力,先后战胜了李世石、柯洁等世界顶尖围棋选手,引起了全球的轰动 。这一成果不仅证明了强化学习在解决复杂决策问题上的巨大潜力,也为游戏 AI 的发展开辟了新的道路。
除了围棋,强化学习在其他游戏领域也得到了广泛应用。例如在电子竞技领域,OpenAI Five 通过强化学习在 Dota 2 游戏中与人类职业选手展开对抗,展现出了高水平的团队协作和策略制定能力。在策略类游戏中,强化学习可以帮助智能体学习到最优的资源管理和战略规划策略,从而在游戏中取得胜利。通过强化学习训练的游戏智能体,能够不断提升自身的游戏水平,为玩家提供更具挑战性和趣味性的游戏体验 。
机器人领域:智能控制升级
在机器人领域,强化学习为机器人的智能控制带来了革命性的变化,使机器人能够更好地适应复杂多变的环境,完成各种高难度任务。
在路径规划方面,传统方法在面对复杂动态环境时往往捉襟见肘,而强化学习赋予机器人自主学习能力,使其能依据环境实时状态,如周围障碍物分布、目标位置等,通过不断尝试不同路径并结合奖励反馈,探索出最优路径 。比如在仓库物流场景中,搭载强化学习算法的机器人能灵活穿梭于货架间,高效完成货物搬运任务,显著提高物流效率。
在动作控制上,强化学习助力机器人掌握复杂动作技能,增强其在复杂环境中的操作能力。以机器人抓取任务为例,机器人需依据物体形状、位置和姿态等信息,选择合适抓取动作,强化学习通过大量训练让机器人学会调整手臂关节角度、手指抓握力度等,以适应不同物体抓取需求,大大提升了机器人的操作灵活性和精准度 。
在智能导航领域,基于强化学习的机器人可以实时感知环境信息,动态规划最优路径,避开障碍物,实现自主导航。在家庭服务场景中,扫地机器人利用强化学习技术,能自动识别家具、墙壁等环境特征,规划合理清扫路径,高效完成清扫任务 。
自动驾驶领域:未来出行变革
在自动驾驶领域,强化学习正引领着一场未来出行的变革,为实现安全、高效、智能的出行方式提供了关键技术支持。
自动驾驶汽车在行驶过程中,需要根据实时的交通状况、道路条件和车辆状态等信息做出决策,以确保行驶的安全和顺畅。强化学习算法可以将车辆的当前状态作为输入,输出一个动作,即车辆应该采取的行驶方向、速度和加速度等控制指令 。通过不断地与环境进行交互和反馈,强化学习可以逐步学习到最优的决策策略,使车辆能够在复杂的交通环境中做出合理的决策。
在路径规划方面,强化学习可以根据地图信息、交通状况和车辆的目标位置,为车辆规划出一条安全、高效的行驶路径。它不仅可以考虑静态的道路信息,还能实时应对动态变化的交通情况,如交通拥堵、道路施工等,及时调整路径,避免延误 。
在决策优化方面,强化学习可以综合考虑多个因素,如交通规则、道路状况、行人和其他车辆的动态信息等,选择最优的行驶策略。例如,在遇到路口时,车辆可以根据强化学习算法判断是否可以安全通过,还是需要减速等待;在超车时,能够评估超车的安全性和可行性,做出合理的决策 。
目前,许多汽车制造商和科技公司都在积极探索强化学习在自动驾驶中的应用,取得了一系列的研究成果和实践进展。虽然仍面临一些挑战,如算法的安全性和可靠性、数据的隐私保护等,但随着技术的不断发展和完善,强化学习有望为自动驾驶技术的突破和普及做出重要贡献,推动未来出行方式的变革 。
推荐系统领域:个性化推荐升级
在推荐系统领域,强化学习的应用为实现更加精准、个性化的推荐服务提供了有力的支持,极大地提升了用户体验和平台的商业价值。
传统的推荐系统主要采用基于内容的推荐、基于协同过滤的推荐等方法,这些方法在处理动态用户行为和环境变化时存在一定的局限性。而强化学习可以将推荐系统视为一个与用户环境进行交互的智能体,根据用户的实时反馈(如点击、购买、收藏等行为)动态调整推荐策略 。
在实际应用中,强化学习通过将用户的历史行为、兴趣偏好和当前上下文等信息作为状态输入,将推荐的内容作为动作输出,将用户对推荐内容的反馈(如点击率、转化率等)作为奖励信号,构建一个马尔可夫决策过程 。通过不断地学习和优化,推荐系统可以逐渐找到最优的推荐策略,使得推荐的内容更加符合用户的需求和兴趣,提高用户的满意度和忠诚度 。
例如,在电商平台中,强化学习可以根据用户的浏览历史、购买记录和实时搜索行为,实时调整推荐的商品列表,为用户推荐他们真正感兴趣且可能购买的商品,从而提高用户的购买转化率和平台的销售额 。在视频平台中,强化学习可以根据用户的观看历史和实时观看行为,推荐用户可能喜欢的视频内容,增加用户的观看时长和平台的用户粘性 。
强化学习在推荐系统中的应用不仅可以提高推荐的准确性和个性化程度,还可以实现多目标优化,如同时考虑用户满意度、点击率、转化率和平台收益等多个目标。通过合理设计奖励函数和优化算法,强化学习能够在不同目标之间找到平衡,实现推荐系统的整体优化 。
强化学习实践:代码实现
准备工作
在进行强化学习的代码实践之前,首先需要搭建好相应的开发环境。我们将使用 Python 作为主要编程语言,它拥有丰富的库和工具,非常适合机器学习和强化学习的开发。
对于强化学习环境的搭建,我们会用到 OpenAI Gym 库。Gym 提供了多种标准的强化学习环境,使得开发者可以方便地在不同环境中测试和比较强化学习算法 。通过以下命令可以安装 Gym:
pip install gym
在算法实现方面,我们可以选择使用 TensorFlow 或 PyTorch 深度学习框架。它们都提供了强大的张量计算和神经网络构建功能,有助于实现复杂的强化学习算法。以 PyTorch 为例,安装命令如下(假设使用 CUDA 加速,根据实际情况选择版本):
pip install torch torchvision torchaudio
如果使用 TensorFlow,安装命令为:
pip install tensorflow
以 Q - learning 算法为例
下面我们通过一个具体的例子 —— 迷宫问题,来展示 Q - learning 算法的代码实现过程。
首先,定义迷宫环境。我们用一个二维数组表示迷宫,其中 0 表示可通行的路径,1 表示墙壁,2 表示起点,3 表示终点。代码如下:
import numpy as np
# 定义迷宫
maze = np.array([
[0, 1, 0, 0, 0],
[0, 1, 0, 1, 0],
[0, 0, 0, 0, 0],
[0, 1, 1, 1, 0],
[0, 0, 0, 1, 3]
])
# 迷宫的行数和列数
row_num, col_num = maze.shape
# 定义动作:上、下、左、右
actions = [( - 1, 0), (1, 0), (0, - 1), (0, 1)]
接下来,初始化 Q 值表。Q 值表的大小为(行数 * 列数,动作数),所有值初始化为 0:
# 初始化Q值表
Q = np.zeros((row_num * col_num, len(actions)))
然后,实现 Q - learning 算法的训练过程。在训练过程中,我们使用 ε - greedy 策略来平衡探索和利用,根据一定概率选择随机动作,以探索新的状态;否则选择当前 Q 值最大的动作,以利用已有的经验 。训练过程的代码如下:
# 学习率
alpha = 0.1
# 折扣因子
gamma = 0.9
# ε - greedy策略中的ε值
epsilon = 0.1
# 训练的最大回合数
max_episodes = 1000
for episode in range(max_episodes):
# 找到起点的位置
start_x, start_y = np.where(maze == 2)
start_x, start_y = start_x[0], start_y[0]
state = start_x * col_num + start_y
while True:
# 根据ε - greedy策略选择动作
if np.random.rand() < epsilon:
action = np.random.randint(0, len(actions))
else:
action = np.argmax(Q[state])
# 执行动作,得到下一个状态
next_x = start_x + actions[action][0]
next_y = start_y + actions[action][1]
# 判断是否越界或遇到墙壁
if next_x < 0 or next_x >= row_num or next_y < 0 or next_y >= col_num or maze[next_x][next_y] == 1:
next_state = state
reward = -1 # 惩罚
else:
next_state = next_x * col_num + next_y
if maze[next_x][next_y] == 3:
reward = 10 # 到达终点的奖励
else:
reward = 0
# 更新Q值
Q[state][action] += alpha * (reward + gamma * np.max(Q[next_state]) - Q[state][action])
state = next_state
start_x, start_y = next_x, next_y
# 判断是否到达终点
if maze[next_x][next_y] == 3:
break
最后,根据训练得到的 Q 值表,找到从起点到终点的最优路径:
# 找到最优路径
start_x, start_y = np.where(maze == 2)
start_x, start_y = start_x[0], start_y[0]
state = start_x * col_num + start_y
path = [(start_x, start_y)]
while True:
action = np.argmax(Q[state])
next_x = start_x + actions[action][0]
next_y = start_y + actions[action][1]
next_state = next_x * col_num + next_y
path.append((next_x, next_y))
start_x, start_y = next_x, next_y
state = next_state
if maze[next_x][next_y] == 3:
break
print("最优路径:", path)
通过上述代码,我们实现了使用 Q - learning 算法解决迷宫问题。在这个过程中,我们可以看到 Q - learning 算法如何通过不断地与环境交互,学习到最优的策略,从而找到从起点到终点的最优路径 。这个简单的例子展示了强化学习算法在实际问题中的应用过程,为进一步理解和应用强化学习提供了基础。
挑战与展望
现存挑战剖析
尽管强化学习在理论研究和实际应用中取得了显著进展,但仍面临着一系列挑战,限制了其更广泛的应用和发展。
- 样本效率低:强化学习通常需要大量的样本数据来学习有效的策略。在实际应用中,获取大量高质量的样本往往需要耗费大量的时间、成本和资源。例如在机器人控制领域,每次实验都需要实际操作机器人,这不仅耗时,还可能对机器人造成磨损。在一些复杂的环境中,智能体需要探索巨大的状态 - 动作空间,才能找到最优策略,这使得样本效率低下的问题更加突出。
- 收敛性问题:强化学习算法的收敛性是一个关键问题。在复杂的环境中,算法可能难以收敛到最优策略,甚至可能陷入局部最优解。例如在一些具有非凸奖励函数的场景中,传统的梯度下降方法可能无法找到全局最优解 。算法的收敛速度也可能较慢,需要进行大量的迭代才能达到较好的性能,这在实时性要求较高的应用中是一个严重的限制。
- 泛化能力弱:强化学习模型在训练环境中表现良好,但在面对新的、未见过的环境时,往往难以保持良好的性能,即泛化能力较弱。这是因为模型可能过度拟合了训练环境的特定特征,而无法适应环境的变化。例如在自动驾驶中,训练模型时使用的是特定地区和路况的数据,当车辆行驶到不同地区或遇到特殊路况时,模型可能无法做出准确的决策 。
- 安全性和可靠性:在一些关键应用领域,如医疗、自动驾驶和金融等,强化学习算法的安全性和可靠性至关重要。然而,由于强化学习是通过试错来学习的,在学习过程中可能会产生一些危险或不可接受的行为。例如在自动驾驶中,如果算法在学习过程中尝试了危险的驾驶动作,可能会导致严重的事故 。此外,强化学习模型的决策过程往往缺乏可解释性,这使得人们难以理解和信任模型的决策,也增加了其在关键领域应用的难度 。
未来发展趋势
尽管面临诸多挑战,但强化学习的未来发展前景依然十分广阔。随着技术的不断进步和研究的深入,强化学习有望在以下几个方面取得突破和发展 。
- 与其他技术融合:强化学习将与深度学习、迁移学习、元学习等技术更紧密地融合,发挥各自的优势,解决复杂的实际问题。例如,强化学习与深度学习的结合可以处理高维状态和动作空间,提高算法的效率和性能;强化学习与迁移学习的结合可以使智能体快速适应新环境,提高泛化能力 。强化学习与其他领域的交叉融合也将带来新的研究方向和应用场景,如强化学习与量子计算、生物计算等的结合,可能会为解决一些传统方法难以解决的问题提供新思路 。
- 应用领域拓展:强化学习将在更多领域得到应用,为各行业的发展带来新的机遇。在能源领域,强化学习可以用于优化能源分配和管理,提高能源利用效率;在医疗领域,强化学习可以辅助医生制定个性化的治疗方案,提高治疗效果;在教育领域,强化学习可以实现个性化学习,根据学生的学习情况和特点提供定制化的学习内容和指导 。随着强化学习技术的不断成熟,它将逐渐渗透到各个行业,推动产业升级和创新发展 。
- 理论研究突破:未来的研究将致力于解决强化学习中的理论问题,如样本效率、收敛性、泛化能力等。通过发展新的理论和方法,提高强化学习算法的性能和可靠性。例如,研究更加高效的探索策略,以减少样本需求;设计更合理的奖励函数,引导智能体更快地收敛到最优策略;探索新的泛化理论,提高模型在不同环境中的适应性 。理论研究的突破将为强化学习的实际应用提供更坚实的基础,推动其在更多领域的成功应用 。
- 多智能体强化学习发展:随着智能体数量的增加和环境复杂性的提高,多智能体强化学习将成为研究的热点。多智能体强化学习研究多个智能体在相互作用的环境中如何学习和决策,以实现共同的目标或各自的目标 。在智能交通系统中,多个车辆可以作为智能体,通过多智能体强化学习实现协同驾驶,提高交通效率和安全性;在分布式机器人系统中,多个机器人可以通过多智能体强化学习实现协作完成复杂任务 。未来,多智能体强化学习将在更广泛的领域得到应用,如物联网、供应链管理、社交网络等,为解决复杂的分布式系统问题提供有效的方法 。
总结
强化学习作为机器学习领域的重要分支,以其独特的学习机制和强大的决策优化能力,在众多领域展现出了巨大的潜力和应用价值 。通过智能体与环境的交互,强化学习能够不断探索和学习最优策略,以实现目标的最大化。从游戏领域的 AlphaGo 战胜人类棋手,到机器人领域的智能控制、自动驾驶领域的未来出行变革以及推荐系统领域的个性化推荐升级,强化学习的应用正深刻地改变着我们的生活和工作方式 。
在实践过程中,我们不仅深入理解了强化学习的核心原理,包括状态、动作、奖励、策略和价值函数等关键要素,还掌握了 Q - learning、DQN、策略梯度、Actor - Critic 等经典算法的实现和应用。通过迷宫问题的代码实践,我们直观地感受到了强化学习算法如何在实际问题中发挥作用,如何通过不断地试错和学习,找到最优的解决方案 。
然而,我们也清楚地认识到强化学习目前仍面临着诸多挑战,如样本效率低、收敛性问题、泛化能力弱以及安全性和可靠性等。但这些挑战也为我们未来的研究和发展指明了方向 。相信随着技术的不断进步和创新,强化学习将在与其他技术的融合中不断突破,拓展更广泛的应用领域,为解决各种复杂的实际问题提供更加有效的解决方案 。
如果你对机器学习和人工智能充满热情,那么强化学习绝对是一个值得深入探索的领域。它不仅能让你领略到机器学习的魅力,还能为你的职业生涯开启一扇通往创新和前沿技术的大门。希望本文能成为你探索强化学习的起点,激发你进一步学习和实践的兴趣,在这个充满无限可能的领域中,创造出属于自己的精彩 !


















 743
743

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











