






 随着机器视觉技术的普及和简易开发平台的出现,机器视觉工程师面临技术门槛降低的挑战。要保持职业地位,工程师需转向AI视觉和3D视觉,尤其是3D视觉因其高门槛和广阔前景更具发展潜力。3DVisionDevelopmentToolkit提供了一个入门捷径。
随着机器视觉技术的普及和简易开发平台的出现,机器视觉工程师面临技术门槛降低的挑战。要保持职业地位,工程师需转向AI视觉和3D视觉,尤其是3D视觉因其高门槛和广阔前景更具发展潜力。3DVisionDevelopmentToolkit提供了一个入门捷径。
你意识到了吗,机器视觉的光环正在逐渐消失!
在外行人看来,机器视觉这个行业蓬勃发展,欣欣向荣,各行各业都需要借助机器视觉技术来完成智能化升级和转型。机器视觉工程师也具有很大的发展空间和提升空间。
但事实却真是如此吗?
真实的情况是,机器视觉大厂为了抢占市场份额,极力推广软硬件系统,并研发了简易便捷的机器视觉开发平台,极大地提升了机器视觉开发效率,降低了开发难度,但也同时也降低了机器视觉的入行门槛
机器视觉工程师在逐渐沦为一个普通的工种,甚至逐渐成为了配套其他工种的存在
为什么会这样呢?
因为机器视觉本质上是一种集成技术,集成光学成像、软件编程和算法开发的一种技术。机器视觉相比计算机视觉更侧重于解决实际生产问题。但是对于机器视觉工程师来说:
- 光学成像 不比光学物理工程师,具备专业的光学成像知识,能够灵活构建最佳的光学成像系统
- 软件编程 不比IT软件工程师,具备熟练的软件编程能力,能够完成复杂软件框架和界面的开发
- 算法开发 不比高级算法工程师,拥有大量的数学理论基础,可以完成超底层算法优化和复杂算法开发
所以说,绝大多数视觉工程师就是什么都懂一些,但什么都不精。
这就是目前国内绝大多数视觉工程师的职业能力现状!
先别急着扎心,更扎心的还在后面:
当一个高新行业的技术门槛被降低,其职业的光环就会逐渐暗淡。如果机器视觉工程师不能在多专业协同的合作模式中体现出更重要的技术价值,创造更高的附加利润,很快就会沦为一个为其他专业配套的普通工种。
那么机器视觉工程师应该如何保住自己的职场C位呢?!
答案是:
一定要向更高阶的技术迈进!
尽快向更高阶的技术迈进!
坚定地向更高阶的技术迈进!
目前机器视觉技术的发展方向大致分为两个:
1.AI视觉
2.3D视觉
AI没啥可说的,不是清北这类学校毕业的,最好就将AI技术当成一个工具使用,不要研究太深,因为这项技术发展太快,很难跟得上脚步。而且在工程实践中,新的技术还有很长的路要走。
3D视觉倒是一个很好的方向,因为它的从业门槛高、薪资高,具有更大的发展空间和发展潜力,最重要的是,由于3D视觉算法的高维特征以及系统的灵活构建要求,视觉大厂很难开发出类似2D视觉的简易开发平台,这给视觉工程师可以带来极大的发挥空间和创造空间!
📣 进阶3D视觉可以保证你在未来3-5年内稳坐职场C位。
你可能会问:非科班出身,可以入行3D视觉吗?
答案是可以的。
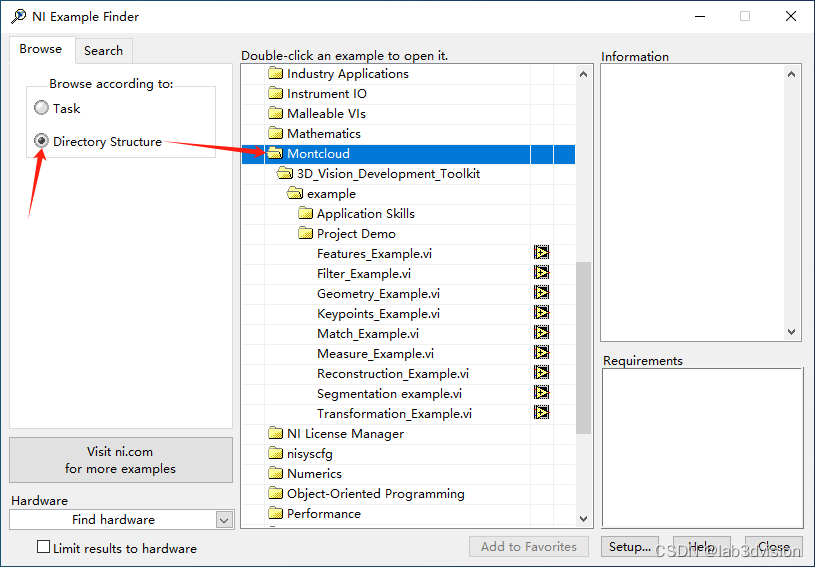
近期国内某公司推出了👉3D视觉开发工具包(3D Vision Development Toolkit),工具包具有大量程序范例,对照其官网上的免费的视频教程,每天抽出不到1个小时学习,不到半个月就能独立进行3D视觉的工程实战。尤其对LabVIEW用户,绝对是个巨大的福音!
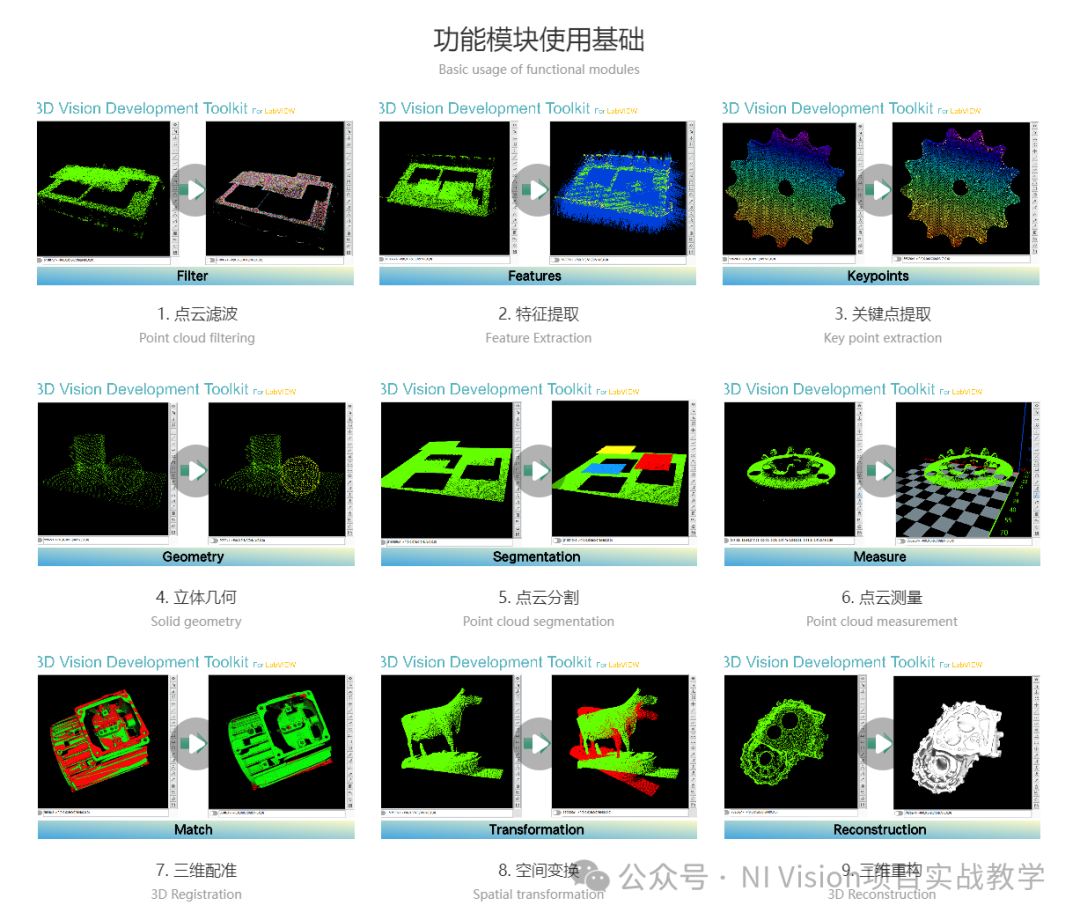
对于LabVIEW工程师来说,这是进入3D视觉行业最简易最快速的通道
当前的经济环境下,最重要的投资就是对自己的技能投资,尽早入行,抢占先机!还在等待什么,赶快点击下方链接下载试用吧!
👉www.lab3dvision.com

















 905
905

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









