






我们是做个程序员,还是做个工程师?
我们是做个工程师,还是对世界充满兴趣和热爱的人?
这些花费巨大,可以私有,不必公布的独门绝技,为什么要公开?
通过华为事件,可以看出,我们的工业软件还是受制于人,我们所做的,只不过是为国家添砖加瓦,或者说报答父母。
这些规则,本来谁都可以得到,却被垄断了,不太好。
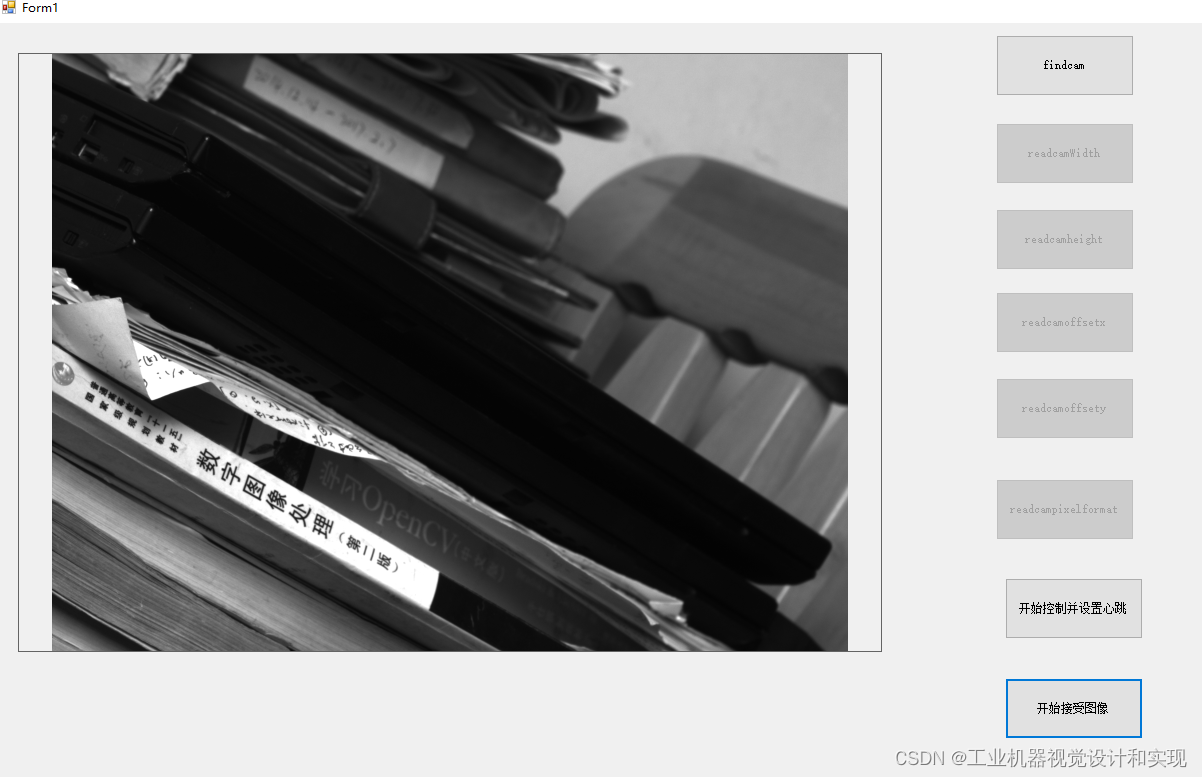
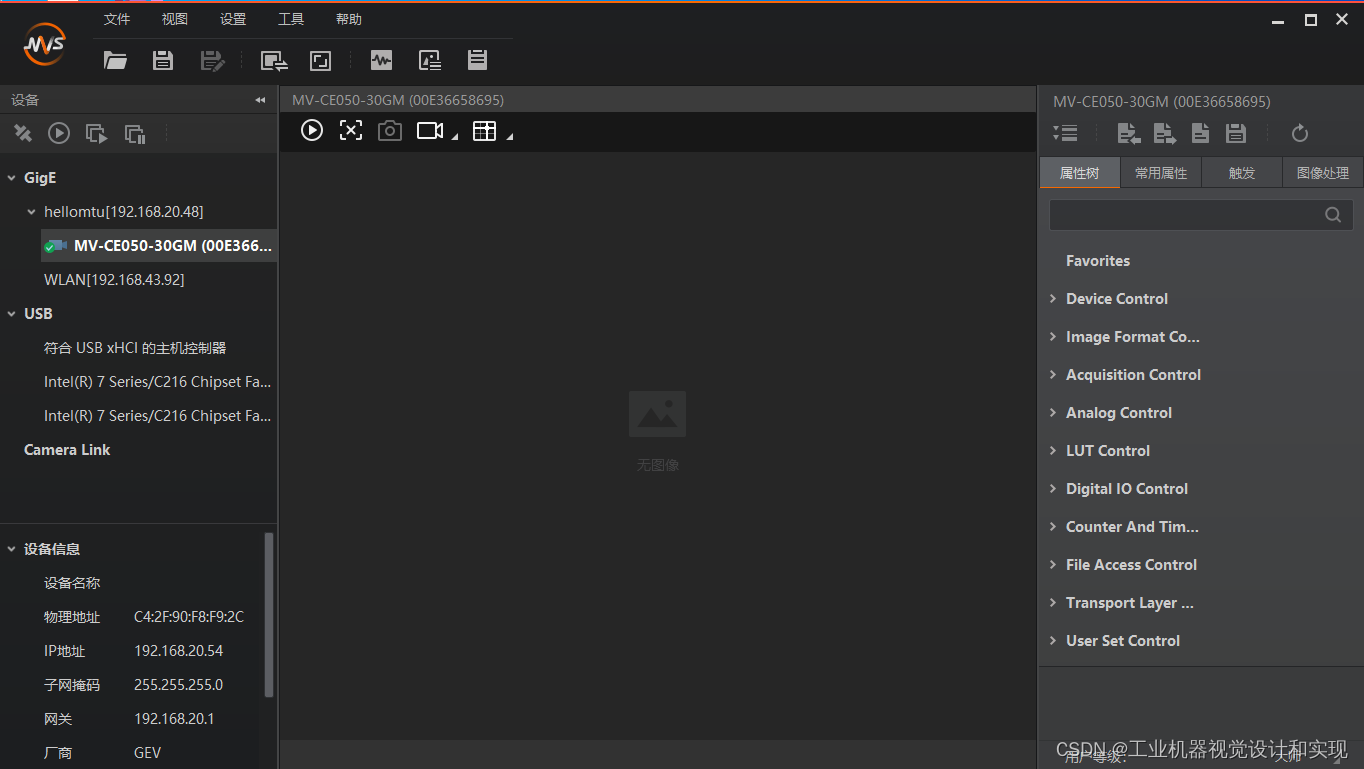
以下是c#winform的程序整理:(仍然是针对500万的海康gige工业黑白相机,这里的针对性很强,但又gige的协议和wireshark,我相信其他相机也是可以搞定的,最容易的是海康的其他分辨率的工业黑白相机)
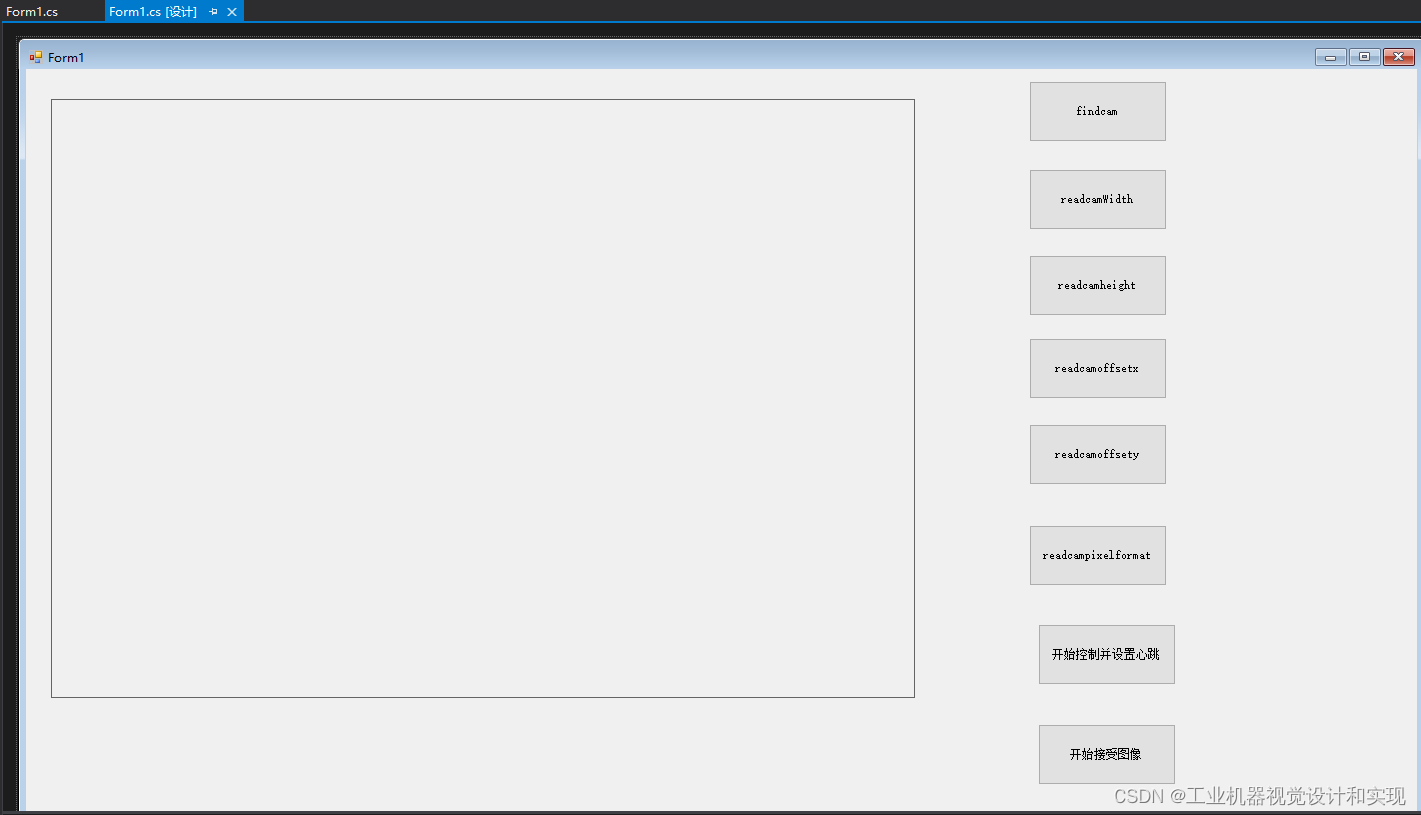
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
// UdpClient socketRxRaw = new UdpClient(63378);
UdpClient GVCPsocket = new UdpClient(3956);
private void Form1_Load(object sender, EventArgs e)
{
}
private void button1_Click(object sender, EventArgs e)
{
byte[] sendbuff = new byte[12] { 0x42, 0x01, 0x00, 0x02, 0x00, 0x00,0,1,0,0,0,0 };
IPEndPoint remotetarget = new IPEndPoint(IPAddress.Parse("192.168.20.54"), 3956);
IPEndPoint localtarget = new IPEndPoint(IPAddress.Any, 3956);
GVCPsocket.Send(sendbuff, 12, remotetarget);
Thread.Sleep(1000);
byte[] buf = GVCPsocket.Receive(ref localtarget);
// GVCPsocket.Close();//关闭链接
}
private void button2_Click(object sender, EventArgs e)
{
IPEndPoint localtarget = new IPEndPoint(IPAddress.Any, 3956);
IPEndPoint remotetarget = new IPEndPoint(IPAddress.Parse("192.168.20.54"), 3956);
byte[] sendbuff = new byte[12] { 0x42, 0x01, 0x00, 0x80, 0x00, 0x04,
0x00, 0x91, 0x00, 0x03, 0x03, 0x60 };
GVCPsocket.Send(sendbuff, 12, remotetarget);
Thread.Sleep(1000);
byte[] camwidth = GVCPsocket.Receive(ref localtarget);
}
private void button3_Click(object sender, EventArgs e)
{
IPEndPoint localtarget = new IPEndPoint(IPAddress.Any, 3956);
IPEndPoint remotetarget = new IPEndPoint(IPAddress.Parse("192.168.20.54"), 3956);
byte[] sendbuff = new byte[12] { 0x42, 0x01, 0x00, 0x80, 0x00, 0x04,
0x00, 0x92, 0x00, 0x03, 0x03, 0xa0 };
GVCPsocket.Send(sendbuff, 12, remotetarget);
Thread.Sleep(1000);
byte[] camheight = GVCPsocket.Receive(ref localtarget);
}
private void button5_Click(object sender, EventArgs e)
{
IPEndPoint localtarget = new IPEndPoint(IPAddress.Any, 3956);
IPEndPoint remotetarget = new IPEndPoint(IPAddress.Parse("192.168.20.54"), 3956);
byte[] sendbuff = new byte[12] { 0x42, 0x01, 0x00, 0x80, 0x00, 0x04,
0x00, 0x93, 0x00, 0x03, 0x03, 0x0e0 };
GVCPsocket.Send(sendbuff, 12, remotetarget);
Thread.Sleep(200);
byte[] camoffsetx = GVCPsocket.Receive(ref localtarget);
}
private void button4_Click(object sender, EventArgs e)
{
IPEndPoint localtarget = new IPEndPoint(IPAddress.Any, 3956);
IPEndPoint remotetarget = new IPEndPoint(IPAddress.Parse("192.168.20.54"), 3956);
byte[] sendbuff = new byte[12] { 0x42, 0x01, 0x00, 0x80, 0x00, 0x04,
0x00, 0x94, 0x00, 0x03, 0x04, 0x20};
GVCPsocket.Send(sendbuff, 12, remotetarget);
Thread.Sleep(100);
byte[] camoffsety = GVCPsocket.Receive(ref localtarget);
}
private void button6_Click(object sender, EventArgs e)
{
IPEndPoint localtarget = new IPEndPoint(IPAddress.Any, 3956);
IPEndPoint remotetarget = new IPEndPoint(IPAddress.Parse("192.168.20.54"), 3956);
byte[] sendbuff = new byte[12] { 0x42, 0x01, 0x00, 0x80, 0x00, 0x04,
0x00, 0x95, 0x00, 0x03, 0x06, 0x10 };
GVCPsocket.Send(sendbuff, 12, remotetarget);
Thread.Sleep(50);
byte[] cammono8 = GVCPsocket.Receive(ref localtarget);//=01080001
}
bool 可以控制 = false;
bool 可以设置心跳 = false;
private void button7_Click(object sender, EventArgs e)
{
IPEndPoint localtarget = new IPEndPoint(IPAddress.Any, 3956);
IPEndPoint remotetarget = new IPEndPoint(IPAddress.Parse("192.168.20.54"), 3956);
byte[] sendbuff = new byte[12] { 0x42, 0x01, 0x00, 0x80, 0x00, 0x04,
0x01, 0x28, 0x00, 0x00, 0x0a, 0x00 };
GVCPsocket.Send(sendbuff, 12, remotetarget);
Thread.Sleep(50);
byte[] retfree = GVCPsocket.Receive(ref localtarget);// //如果返回如此[11]=0,its free can be control
if (retfree[11] == 0)
可以控制 = true;
if(可以控制)
{
//开始控制,向寄存器写入0x02
sendbuff = new byte[16] { 0x42, 0x01, 0x00, 0x82, 0x00, 0x08,
0x01, 0x29, 0x00, 0x00, 0x0a, 0x00, 0x00, 0x00, 0x00, 0x02 };
GVCPsocket.Send(sendbuff, 16, remotetarget);
Thread.Sleep(50);
retfree = GVCPsocket.Receive(ref localtarget);// //如果返回如此[11]=1,开始设置心跳
if (retfree[11] ==1)
可以设置心跳 = true;
}
if (可以设置心跳)
{
byte 增加1 = 0x2d;
for (int i = 0; i < 5; i++)//怎样判断gvcpReply.status==success?如果在5次内设置成功了,就要跳出来
{
byte[] sendbuff16 = new byte[16] { 0x42, 0x01, 0x00, 0x82, 0x00, 0x08,
0x01, 增加1, 0x00, 0x00, 0x09, 0x38, 0x00, 0x00, 0x27, 0x10 };
GVCPsocket.Send(sendbuff16, 16, remotetarget);
Thread.Sleep(500);
byte[] ret12 = GVCPsocket.Receive(ref localtarget);
if (ret12[11] == 1)
{
//成功了?
i = 5;
break;
}
增加1++;
}
}
backgroundWorker1.RunWorkerAsync();//启动心跳
}
bool m_bgvsp = false;
private void backgroundWorker1_DoWork(object sender, DoWorkEventArgs e)
{
byte hello增加1 = 0x2d;
IPEndPoint remotetarget = new IPEndPoint(IPAddress.Parse("192.168.20.54"), 3956);
m_bgvsp = true;
while (m_bgvsp)
{
byte[] sendbuff16 = new byte[16] { 0x42, 0x01, 0x00, 0x82, 0x00, 0x08,
0x01, hello增加1, 0x00, 0x00, 0x09, 0x38, 0x00, 0x00, 0x27, 0x10 };
GVCPsocket.Send(sendbuff16, 16, remotetarget);
hello增加1++;
Thread.Sleep(50);
}
}
Socket socketRxRaw;
private void button8_Click(object sender, EventArgs e)
{
if (m_bgvsp)
{
//1,开始控制,向寄存器写入GevSCPHostPort
IPEndPoint remotetarget = new IPEndPoint(IPAddress.Parse("192.168.20.54"), 3956);
byte[] sendbuff16 = new byte[16] { 0x42, 0x01, 0x00, 0x82, 0x00, 0x08,
0x01, 0x2e, 0x00, 0x00, 0x0d, 0x00, 0x00, 0x00, 0x0f7, 0x92};//写入端口port=63378
GVCPsocket.Send(sendbuff16, 16, remotetarget);//返回1,才可以下一步
Thread.Sleep(50);
//2,开始控制,向寄存器写入GevSCDA
sendbuff16 = new byte[16] { 0x42, 0x01, 0x00, 0x82, 0x00, 0x08,
0x01, 0x2f, 0x00, 0x00, 0x0d, 24, 192, 168, 20, 48};
//写入ip192.168.20.48
GVCPsocket.Send(sendbuff16, 16, remotetarget);//返回1,才可以下一步
Thread.Sleep(50);
/* 3, <Integer Name="ExposureTime_RegAddr">
<Value>
0x00030b04
</Value>*/
sendbuff16 = new byte[16] {0x42, 0x01, 0x00, 0x82, 0x00, 0x08,
0x03, 0x2f, 0x00, 0x03, 0x0b, 0x04,0,0,0x61,0x0a8};
//写入曝光值25000
// 0x03, 0x2f, 0x00, 0x03, 0x0b, 0x04,0,0,0x3a,0x98}; //写入曝光值15000
GVCPsocket.Send(sendbuff16, 16, remotetarget);//返回1,才可以下一步
Thread.Sleep(50);
//4,开始控制,向寄存器写入 var gevSCPSPacketSize = (await Gvcp.GetRegister(nameof(GvcpRegister.GevSCPSPacketSize))).pValue;//地址0x0d04
sendbuff16 = new byte[16] {0x42, 0x01, 0x00, 0x82, 0x00, 0x08,
0x01, 0x31, 0x00, 0x00, 0x0d, 0x04, 64, 0, 0x1f, 0x0e4};
//写入mtu8164
GVCPsocket.Send(sendbuff16, 16, remotetarget);//返回1,才可以下一步
Thread.Sleep(50);
//5,开始控制,向寄存器写入 acquisitionStart.SetValueAsync(1).ConfigureAwait(false)) as GvcpReply
sendbuff16 = new byte[16] {0x42, 0x01, 0x00, 0x82, 0x00, 0x08,
0x01, 0x32, 0x00, 0x03, 0x08, 4, 0, 0, 0, 1};
//写入mtu8164
GVCPsocket.Send(sendbuff16, 16, remotetarget);//返回1,才可以下一步,进入异步线程接受图像
Thread.Sleep(50);
IPEndPoint localtarget = new IPEndPoint(IPAddress.Any, 3956);
byte[] ret12 = GVCPsocket.Receive(ref localtarget);
if (ret12[11] == 0x01)
{
buffer5038848[0] = new byte[2592 * 1944];
buffer5038848[1] = new byte[5038848];
//初始化接受套接字
// 设置UDP服务器的端点
socketRxRaw = new Socket(AddressFamily.InterNetwork, SocketType.Dgram, ProtocolType.Udp);
socketRxRaw.Bind(new IPEndPoint(IPAddress.Any, 63378));// ProtocolType.Udp
// IPEndPoint remotetargetRx = new IPEndPoint(IPAddress.Parse("192.168.20.54"), 63378);
// IPEndPoint localtargetRx = new IPEndPoint(IPAddress.Any, 63378);
socketRxRaw.ReceiveTimeout = 1000;
//One full hd image with GVSP2.0 Header as default, it will be updated for image type
socketRxRaw.ReceiveBufferSize = (int)(5*1024 * 1024);
//socketRxRaw.ReceiveBufferSize = (int)(1920 * 1100);
创建缓冲区以接收数据
//byte[] bytess = new byte[socketRxRaw.ReceiveBufferSize];
//EndPoint remoteEP = (EndPoint)groupEP;
//接受第0帧,测试帧
// socketRxRaw.Receive(m_buff9000);
// 等待广播数据
//int bytesRec = socketRxRaw.ReceiveFrom(bytess, ref remoteEP);
//if (bytess[7]==0)
{
backgroundWorker2.RunWorkerAsync();
}
}
}
}
void showbuffer2pict(byte[] buffer, int ww, int hh, PictureBox destImg)
{
destImg.Size = new System.Drawing.Size(ww, hh);
// //顯示
// int mod = ww % 4;//解决四位对齐问题20150716
// ww = ww - mod;
// byte[] cutvalues = new byte[ww * hh * 3];
// int bytes = ww * hh * 3;
// Bitmap cutPic24 = new Bitmap(ww, hh, System.Drawing.Imaging.PixelFormat.Format24bppRgb);
// BitmapData _cutPic = cutPic24.LockBits(new Rectangle(0, 0, ww, hh), ImageLockMode.ReadWrite,
// cutPic24.PixelFormat);
// IntPtr ptr = _cutPic.Scan0;//得到首地址
// for (int i = 0; i < hh; i++)
// {
// for (int j = 0; j < ww; j++)
// {
// int n = i * ww + j;
// int m = 3 * n;
// cutvalues[m] = buffer[n];
// cutvalues[m + 1] = buffer[n];
// cutvalues[m + 2] = buffer[n];
// }
// }
// System.Runtime.InteropServices.Marshal.Copy(cutvalues, 0, ptr, bytes);
// cutPic24.UnlockBits(_cutPic);
// destImg.Image = cutPic24;
int mod = ww % 4;//解决四位对齐问题20150716
int temproiw = ww + (4 - mod) % 4;//其实这都是和显示相关,处理图像其实不必考虑,
//顯示
byte[] cutvalues = new byte[temproiw * hh * 3];
int bytes = temproiw * hh * 3;
Bitmap cutPic24 = new Bitmap(temproiw, hh, System.Drawing.Imaging.PixelFormat.Format24bppRgb);
BitmapData _cutPic = cutPic24.LockBits(new Rectangle(0, 0, temproiw, hh), ImageLockMode.ReadWrite,
cutPic24.PixelFormat);
IntPtr ptr = _cutPic.Scan0;//得到首地址
for (int i = 0; i < hh; i++)
{
for (int j = 0; j < ww; j++)
{
int n = i * ww + j;
//int m = 3 * n;
int m = 3 * (i * temproiw + j);
cutvalues[m] = buffer[n];
cutvalues[m + 1] = buffer[n];
cutvalues[m + 2] = buffer[n];
}
}
System.Runtime.InteropServices.Marshal.Copy(cutvalues, 0, ptr, bytes);
cutPic24.UnlockBits(_cutPic);
destImg.Image = cutPic24;
}
byte[][] buffer5038848 = new byte[2][];
byte[] m_buff9000 = new byte[9000];
// int frame = 1;
// int jiou = 1;
IntPtr destptr = Marshal.AllocHGlobal(8128); // 分配一个内存块
IntPtr destptrbig = Marshal.AllocHGlobal(5038848); // 分配一个内存块
IntPtr destptrbig2 = Marshal.AllocHGlobal(5038848); // 分配一个内存块
public const int WM_COPYDATA = 0x004A;
[StructLayout(LayoutKind.Sequential)]
public struct CopyDataStruct
{
public IntPtr dwData;
public int cbData;
// [MarshalAs(UnmanagedType.LPStr)]
public IntPtr lpData;
}
[DllImport("User32.dll", EntryPoint = "SendMessage"),]
private static extern int SendMsg(int hwnd, int msg, int wparms, ref CopyDataStruct lparm);
[DllImport("User32.dll", EntryPoint = "FindWindow")]
private static extern int FindWindow(string lpClassName, string lpWindowName);
private void backgroundWorker2_DoWork(object sender, DoWorkEventArgs e)
{
IPEndPoint groupEP = new IPEndPoint(IPAddress.Any, 63378);
EndPoint remoteEP=(EndPoint)groupEP;
int frame = 1;
int jiou = 1;
// buffer5038848[0] = new byte[5038848];
// buffer5038848[1] = new byte[5038848];
while (true)
{
int changdu = socketRxRaw.Receive(m_buff9000);//与函数ReceiveFrom结果一样
// if (m_buff9000[7] == 0) continue;
if (changdu > 1000)
{
int packetIDperframe = (m_buff9000[6] << 8) | m_buff9000[7];
// int zhenshidenPartOfFrame = (packetIDperframe ) % 619;
if (0 == packetIDperframe) continue;
jiou = frame % 2;
if (620 == packetIDperframe)//620有三个包,两个长度小于1000,202404021844剩下两个会不会是帧率?和第几帧?
{
if (jiou == 1)//效果不明显202404021914
{
System.Runtime.InteropServices.Marshal.Copy(m_buff9000, 8, destptrbig + (packetIDperframe - 1) * 8128, 7616);//结果与上面一样,有横线
System.Runtime.InteropServices.Marshal.Copy(destptrbig, buffer5038848[0], 0, 5038848);
showbuffer2pict(buffer5038848[0], 2592, 1944, pictureBox9);
}
else
{
System.Runtime.InteropServices.Marshal.Copy(m_buff9000, 8, destptrbig2 + (packetIDperframe - 1) * 8128, 7616);//结果与上面一样,有横线
System.Runtime.InteropServices.Marshal.Copy(destptrbig2, buffer5038848[1], 0, 5038848);
showbuffer2pict(buffer5038848[1], 2592, 1944, pictureBox9);
}
frame++;
cds.lpData = buffer2[1];//这样写可以吗?
//if (jiou == 0)
//{
// // cds.lpData = buffer2[0];
//showbuffer2pict(buffer5038848[0], 2592, 1944, pictureBox9);
}
else//处理1-619包
{
if (jiou == 1)
{
System.Runtime.InteropServices.Marshal.Copy(m_buff9000, 8, destptrbig + (packetIDperframe - 1) * 8128, 8128);//结果与上面一样,有横线
}
else
{
System.Runtime.InteropServices.Marshal.Copy(m_buff9000, 8, destptrbig2 + (packetIDperframe - 1) * 8128, 8128);//结果与上面一样,有横线
}
}
}
}
for(;;)
{
//try
//{
// int changdu = socketRxRaw.ReceiveFrom(m_buff9000, ref remoteEP);
int changdu = socketRxRaw.Receive(m_buff9000);//与函数ReceiveFrom结果一样
if (m_buff9000[7] == 0) continue;
// int changdu = socketRxRaw.Receive(m_buff9000);//虽然8164,只接受8136
if (changdu != 8136) continue;
if (changdu == 8136)
{
// jiou = frame % 2;
int packetIDperframe = (m_buff9000[6] << 8) | m_buff9000[7];//7,8字节是每帧的分包计数
int zhenshidenPartOfFrame = (packetIDperframe - 1) % 619;//5038848/8128=619
//if (jiou == 1)
//{
// //int bufferStart = (zhenshidenPartOfFrame) *8128; //This use buffer length of regular packet
// //int bufferLength = 8136 -8; //This will only change for final packet
// System.Runtime.InteropServices.Marshal.Copy(m_buff9000, 8, destptr, 8128);
// System.Runtime.InteropServices.Marshal.Copy(destptr, buffer5038848[1], zhenshidenPartOfFrame * 8128, 8128);
// // std::copy(std::begin(buffer) + 8, std::begin(buffer) + 8136, buffer2[1] + zhenshidenPartOfFrame * 8128);
//}
//else
//{
// // std::copy(std::begin(buffer) + 8, std::begin(buffer) + 8136, buffer2[0] + zhenshidenPartOfFrame * 8128);
//System.Runtime.InteropServices.Marshal.Copy(m_buff9000, 8, destptr, 8128);
//System.Runtime.InteropServices.Marshal.Copy(destptr, buffer5038848[0], zhenshidenPartOfFrame * 8128, 8128);
//destptrbig202403301518,为什么c#有横线,c版本没有,代码是一致的
System.Runtime.InteropServices.Marshal.Copy(m_buff9000, 8, destptrbig+ zhenshidenPartOfFrame * 8128, 8128);//结果与上面一样,有横线
// }
if (618 == zhenshidenPartOfFrame)
{
//frame++;
cds.lpData = buffer2[1];//这样写可以吗?
//if (jiou == 0)
//{
// // cds.lpData = buffer2[0];
System.Runtime.InteropServices.Marshal.Copy(destptrbig, buffer5038848[0], 0,5038848);
showbuffer2pict(buffer5038848[0], 2592, 1944, pictureBox9);//不是bmp z序的,正常的202302061722
//}
//else
//{
// showbuffer2pict(buffer5038848[1], 2592, 1944, pictureBox9);//不是bmp z序的,正常的202302061722
//}
// int windowHandler = FindWindow(null, "arrimg");
// if (windowHandler == 0)
// {
// return;
// }
if (Matchbt != null)
// {
// CopyDataStruct cds = new CopyDataStruct();
// cds.dwData = (IntPtr)null;
// // cds.cbData = Matchbt.GetLength(0);
// cds.cbData = 5038848;
// // Matchbt.ToString();
// cds.lpData = Marshal.AllocHGlobal(5038848);
// Marshal.Copy(buffer5038848[0], 0, cds.lpData, 5038848);
// SendMsg(windowHandler, WM_COPYDATA, 0, ref cds);
// }
}
}
//}
//catch (Exception ee)
//{ }
}
}
}
作为一个泥瓦工(程序猿)要上升到墨子或鲁班(数学家)的境界,难度是非常大的,但最基础的一点,充满热爱,能解决小问题,能思考,把老师教的,能用,变成自己的,持之以恒,在某个方向上努力自学。
我也很喜欢,好好学习,天天向上。这句话。
你有没有发现,500万黑白工业相机的所有像素等于5038848,最后四个数字8848,这不是珠穆朗玛峰的高度吗?















 9007
9007

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









