






基于LQR最优控制算法实现的轨迹跟踪控制,建立了基于车辆的质心侧偏角、横摆角速度,横向误差,航向误差四自由度动力学模型作为控制模型,通过最优化航向误差和横向误差,实时计算最优的K值,计算期望的前轮转角实现轨迹跟踪,仿真效果良好,有对应的资料,包运行和。
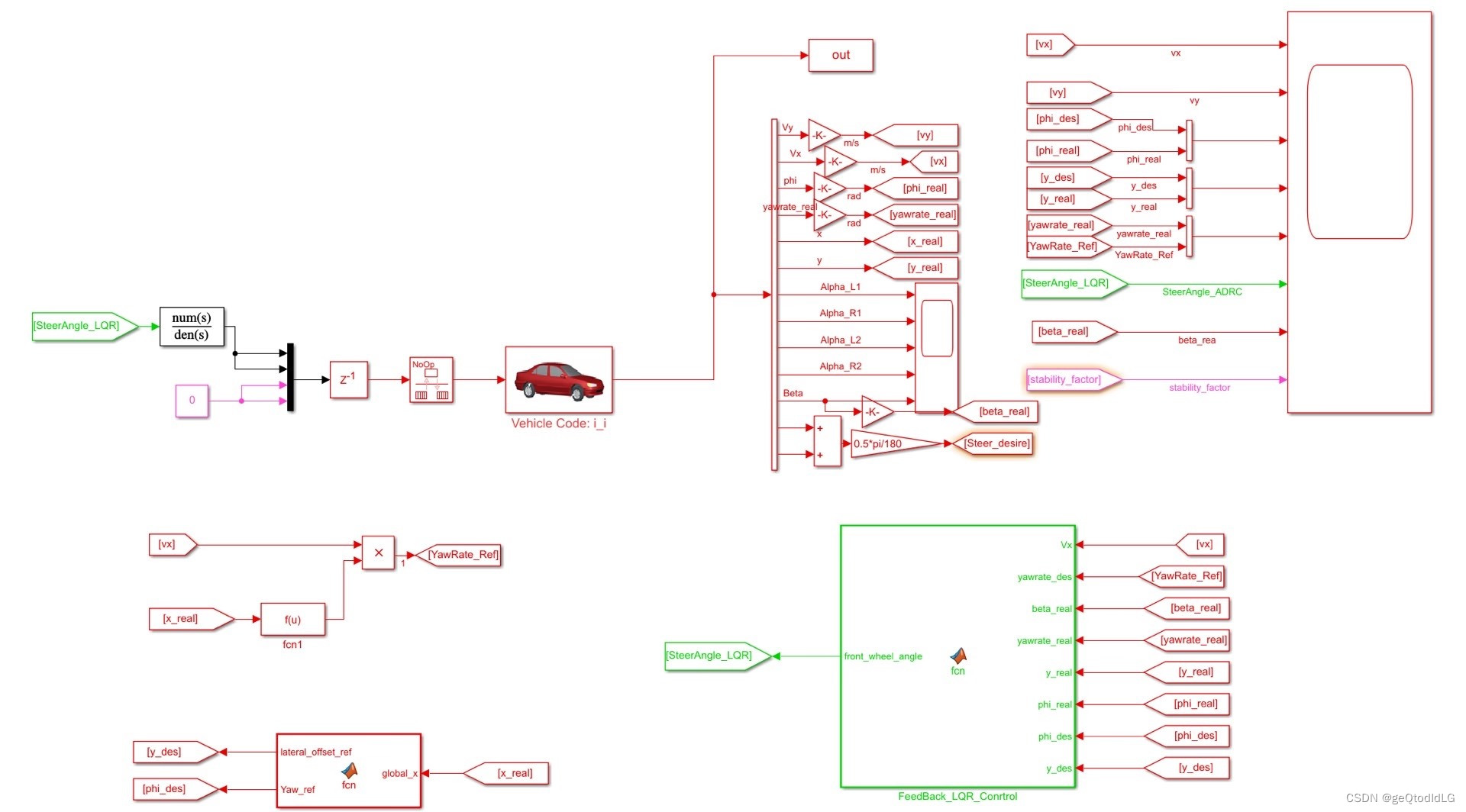
基于LQR最优控制算法实现的轨迹跟踪控制
控制技术是现代工业制造中不可或缺的重要部分。对于车辆控制来说,实时控制车辆行驶轨迹和保证安全性十分关键。在车辆控制领域中,LQR最优控制算法是一种非常成熟和高效的方法,因其在最优性能和稳定性之间取得了平衡,广泛被应用于各种类型的车辆控制。
本文将介绍基于LQR最优控制算法实现的轨迹跟踪控制,以及如何建立控制模型和计算K值,从而实现轨迹跟踪。
一、基于车辆四自由度动力学模型的控制模型
车辆控制的目标是实现车辆在特定路线上的行驶和控制。因此,建立一个能够准确反映车辆行驶状态的控制模型是必要的。基于车辆四自由度动力学模型,本文建立了车辆的侧偏角、横摆角速度,横向误差,航向误差四自由度动力学模型。
在车辆控制中,侧偏角和横摆角速度是衡量车辆稳定性的两个重要参数。横向误差和航向误差则是衡量轨迹跟踪的两个关键参数。基于四自由度动力学模型,可以准确地反映车辆的运动状态,从而实现对车辆的实时控制和调整。
二、最优航向误差和横向误差的计算
在车辆行驶过程中,为了实现轨迹跟踪,需要计算出最优的航向误差和横向误差。本文使用了LQR最优控制算法,通过最小化误差的二次累加值,得到最优的控制器,实现对车辆的实时控制。
在计算最优控制器的过程中,需要确定控制器的K值。K值代表了控制器对误差的响应强度,其大小决定了车辆的控制效果。通过实时计算最优的K值,可以实现对车辆的准确控制和调整,从而保证车辆行驶的稳定性和安全性。
三、期望前轮转角的计算与仿真效果分析
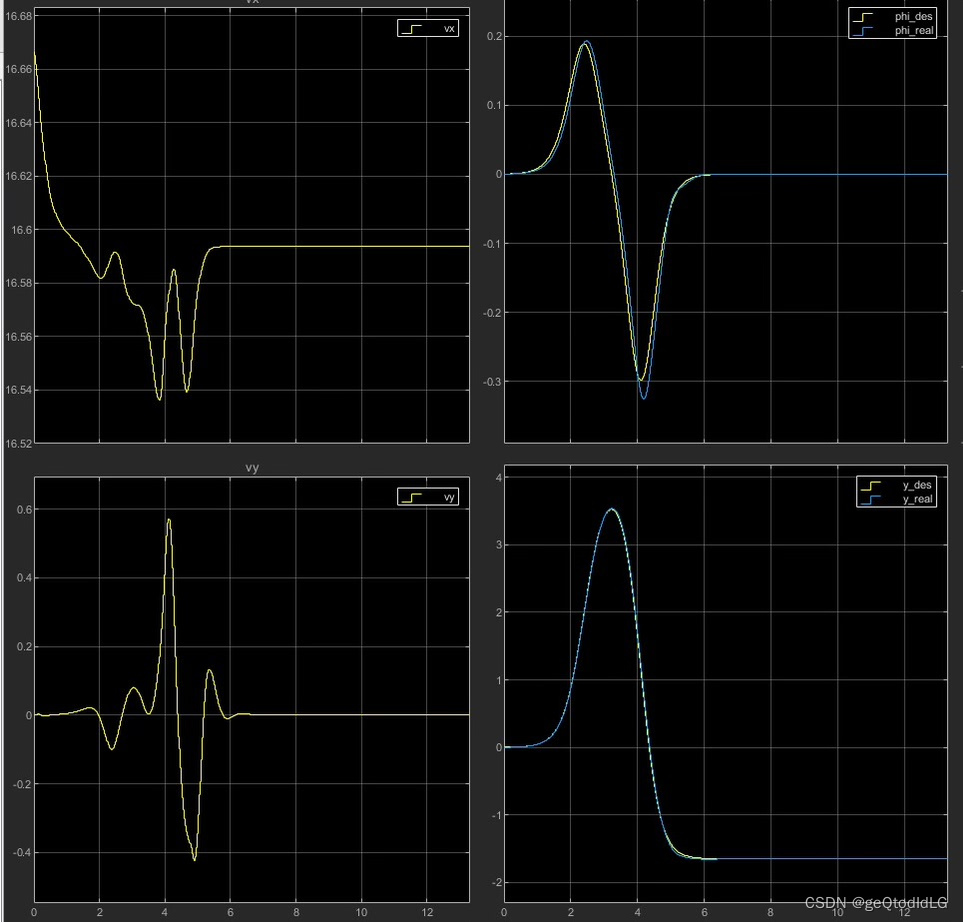
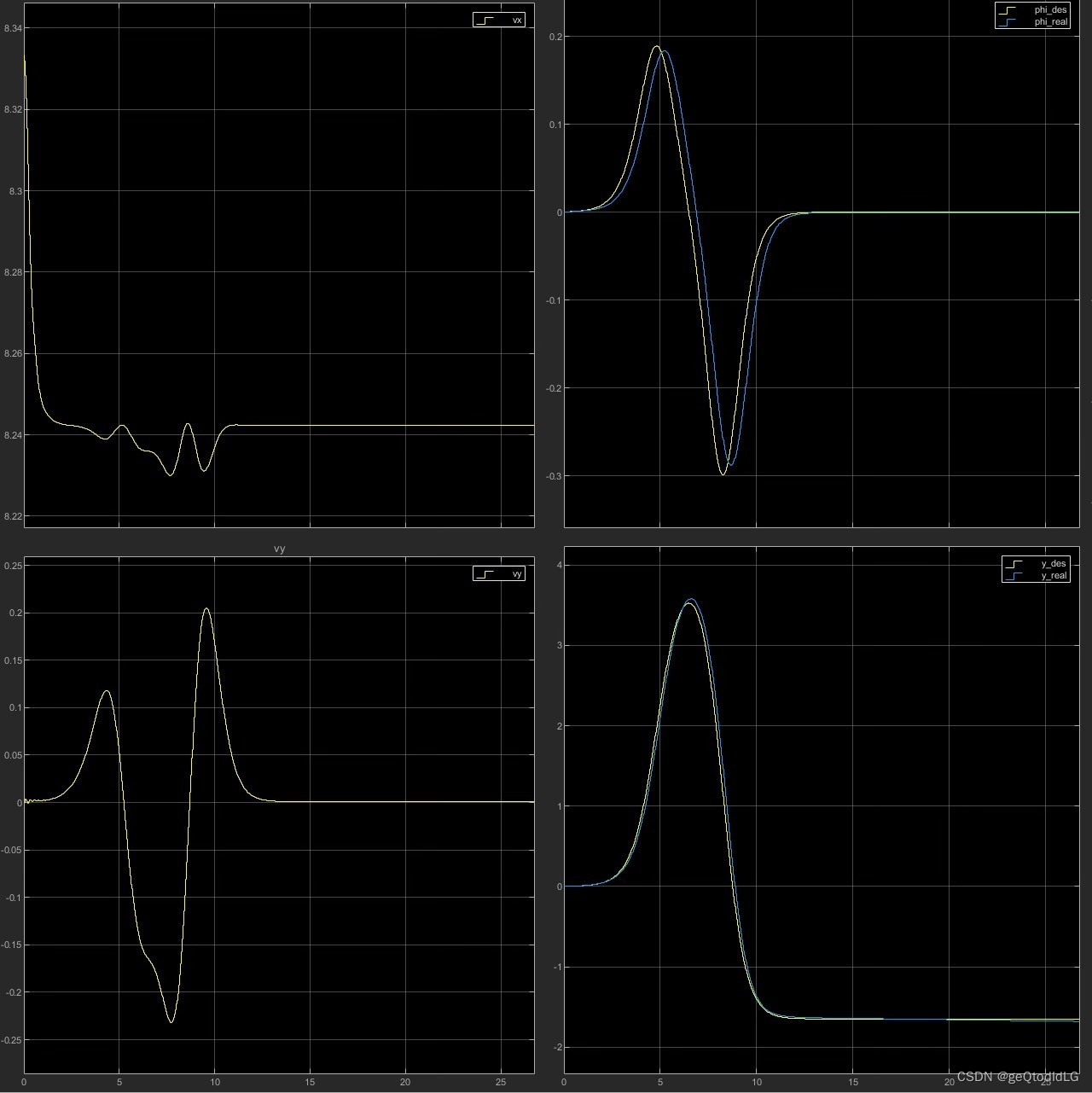
为了实现轨迹跟踪,需要计算期望的前轮转角。本文通过计算车辆的动力学参数,得到期望前轮转角的数值,实现对车辆的高精度控制。
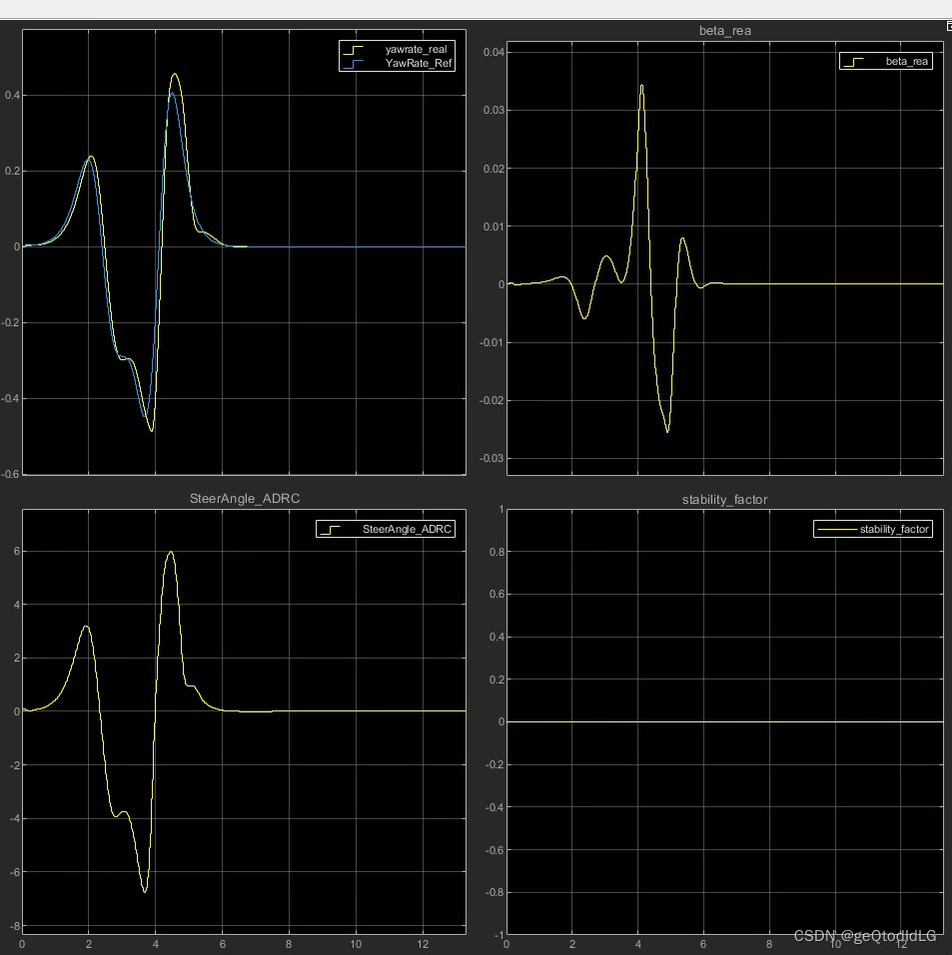
针对本文提出的控制方法,我们进行了相关的仿真实验。结果表明,在实现精准轨迹跟踪的同时,本文提出的控制方法还可以有效地保证车辆的行驶安全性。
四、结论
本文介绍了基于LQR最优控制算法实现的轨迹跟踪控制方法。通过建立基于车辆的四自由度动力学模型和最优化计算航向误差和横向误差,实现期望前轮转角的计算和对车辆的实时控制。仿真结果表明,本文提出的控制方法可以实现精准轨迹跟踪,同时保证车辆的行驶安全性。
相关代码,程序地址:http://lanzouw.top/709284185618.html















 1741
1741











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









