






 超级会员免费看
超级会员免费看
 本文介绍了在ROS2环境下如何快速找到包含特定关键字的功能包,以tf为例,通过`ros2 pkg list | grep tf`列出相关包,然后使用`ros2 pkg prefix tf2_kdl`获取目标包的路径,尤其在存在多个工作空间的情况下显得实用。
本文介绍了在ROS2环境下如何快速找到包含特定关键字的功能包,以tf为例,通过`ros2 pkg list | grep tf`列出相关包,然后使用`ros2 pkg prefix tf2_kdl`获取目标包的路径,尤其在存在多个工作空间的情况下显得实用。
假设我要找一个包含tf关键字的功能包
第一步:ros2 pkg list |grep tf
这一步会返回很多包含tf的功能包
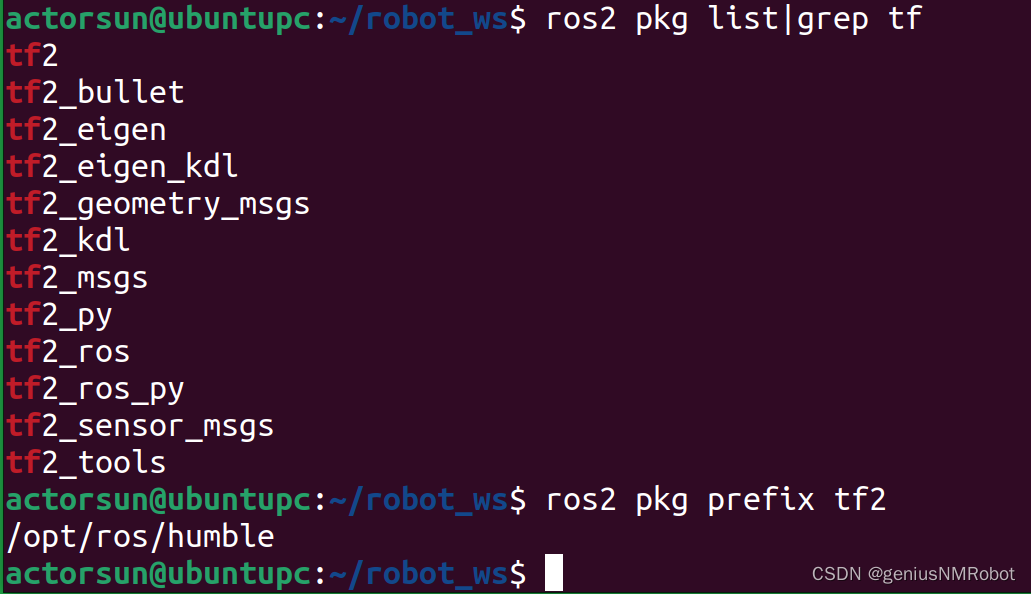
确定我们要找的功能包是tf2_kdl,然后
第二步:
ros2 pkg prefix tf2_kdl,这一句就会返回这个包的路径
我觉得假设有多个工作空间,这个就有用了

假设我要找一个包含tf关键字的功能包
第一步:ros2 pkg list |grep tf
这一步会返回很多包含tf的功能包
确定我们要找的功能包是tf2_kdl,然后
第二步:
ros2 pkg prefix tf2_kdl,这一句就会返回这个包的路径
我觉得假设有多个工作空间,这个就有用了

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























