







直流永磁电机原理
一、电机的负载
1.风机输出功率
P
2
=
K
∗
Q
∗
p
60
∗
η
P2 = \frac{K*Q*p}{60*η}
P2=60∗ηK∗Q∗p
K为系数(1.1~1.5);Q为风量(m3/min);p为风压(Pa);η为风机效率
2.电机的输出功率为
P
2
=
n
∗
T
9.5493
P2 = \frac{n*T}{9.5493}
P2=9.5493n∗T
二、电机的电路与磁路
1.电路方程:
U = E +I*(R1+R2)
U为输入电压;E为电枢在磁场中切割磁力线时产生的反电动势;R1为电枢导线电阻;R2为电刷及电刷与换向器的接触电阻;I为电机的工作电流
三、电机的转矩常数
1.电机的转矩常数
K T = p ∗ N ∗ Φ a ∗ 2 ∗ π KT= \frac{p*N*Φ}{a*2*π} KT=a∗2∗πp∗N∗Φ
- KT是N与Φ的乘积,电机的性能主要与电机内部的N与Φ有关。
2.电机的电动势常数
K
e
=
p
∗
N
∗
Φ
a
∗
60
Ke=\frac{p*N*Φ}{a*60}
Ke=a∗60p∗N∗Φ
- 当Ke是N与Φ的乘积,如果要求某电机要达到指定的电动势常数,只要N与Φ的成绩达到预定值就可以。
- KT=9.5493*Ke
四、电机噪声
| 无噪声电机 | <35dB |
|---|---|
| 低噪声电机 | 35~55dB |
| 正常电机 | 55~75dB |
| – | – |
| 1.噪声源 |
-
空气噪声
此噪声的大小决定于风扇大小、风叶形状、电机转速高低和风阻风路等
空气噪声的基本频率(Hz) :
f v = N ∗ n 60 f_v = \frac{N*n}{60} fv=60N∗n
N为风扇叶片数;n为电机转速(r/min)
经验:风扇直径越大,噪声越大,减少风扇直径10%,可以减少2~3dB -
机械噪声
主要是轴承噪声、转子不平衡等
转子的旋转频率、电机不平衡噪声频率(Hz):
f a = n 60 f_a = \frac{n}{60} fa=60n
滚珠旋转频率(Hz)
f b = d 1 ∗ d 2 ∗ n d r ∗ ( d 1 + d 2 ) ∗ 60 f_b=\frac{d1*d2*n}{dr*(d1+d2)*60} fb=dr∗(d1+d2)∗60d1∗d2∗n
dr为滚珠直径;d1为轴承内圈滚道的直径(mm);d2为轴承外圈滚道的直径(mm) -
电磁噪声
电磁噪声频率(Hz)
f s = Z 60 f_s=\frac{Z}{60} fs=60Z
Z为转子槽数
在电机定、转子气隙中的交变电磁力会使电机定、转子产生振动及噪声。产生噪声的关键词:基波 谐波 单数槽
相关标准:GB755-2008 -
阶次噪声
阶次分析首先需要根据转速信号把等时间采样的振动信号进行角度采样
思考题一
转速精准控制?
影响转速的因素
- 电压 内阻 磁通
机械特性:
n
=
U
N
C
e
∗
Φ
N
−
R
a
+
R
p
a
C
e
∗
C
T
∗
Φ
N
2
∗
T
e
m
n =\frac{U_N}{C_e*Φ_N} - \frac{R_a+Rpa}{C_e*C_T*Φ_N^2}*Tem
n=Ce∗ΦNUN−Ce∗CT∗ΦN2Ra+Rpa∗Tem
电枢电阻:Ra
电枢回路串电阻:Rpa
理想空载转速:
n
0
=
U
N
C
e
∗
Φ
N
n_0 = \frac{U_N}{C_e*Φ_N}
n0=Ce∗ΦNUN
弱磁控制理论:
永磁同步电机dq轴的数学模型:
电压极限圆
u
d
=
−
w
e
∗
L
q
∗
i
q
+
R
s
∗
i
d
u
q
=
w
e
∗
L
d
∗
i
d
+
w
e
∗
ψ
f
+
R
s
∗
i
q
u_d = -w_e*L_q*i_q +Rs*i_d \\ u_q =w_e*L_d*i_d +w_e* ψ_f+R_s*i_q
ud=−we∗Lq∗iq+Rs∗iduq=we∗Ld∗id+we∗ψf+Rs∗iq
电机转速较高时,可以忽略定子电阻的压降,因此定子电压可以表示为:
R
s
∗
i
d
=
0
R
s
∗
i
q
=
0
Rs*i_d = 0 \\ Rs*i_q = 0
Rs∗id=0Rs∗iq=0
u
s
=
(
−
w
e
∗
L
q
∗
i
q
)
2
+
(
w
e
∗
L
d
∗
i
d
+
w
e
∗
ψ
f
)
2
u_s=\sqrt{(-w_e*L_q*i_q)^2+(w_e*L_d*i_d +w_e* ψ_f)^2}
us=(−we∗Lq∗iq)2+(we∗Ld∗id+we∗ψf)2
由
u
l
i
m
=
u
s
(
3
)
u_{lim}=\frac{u_s}{\sqrt(3)}
ulim=(3)us
(
u
l
i
m
/
w
)
2
=
(
L
q
∗
i
q
)
2
+
(
L
d
∗
i
d
)
2
(u_{lim}/w)^2 = (L_q*i_q)^2+(L_d*i_d)^2
(ulim/w)2=(Lq∗iq)2+(Ld∗id)2
这个式子是椭圆公式。椭圆圆心:
−
ψ
f
L
d
,
0
-\frac{ψ_f}{L_d},0
−Ldψf,0
电流极限圆:
永磁同步电机的定子电流轨迹可用电流极限方程:
i
d
2
+
i
q
2
=
i
l
i
m
2
i
l
i
m
=
(
3
)
∗
I
l
i
m
I
l
i
m
:最大相电流基波有效值
i_d^2+i_q^2 =i_{lim}^2 \\ i_{lim} = \sqrt{(3)}*I_{lim} \\ I_{lim}: 最大相电流基波有效值
id2+iq2=ilim2ilim=(3)∗IlimIlim:最大相电流基波有效值
电流轨迹是一个坐标原点为圆心的圆形轨迹
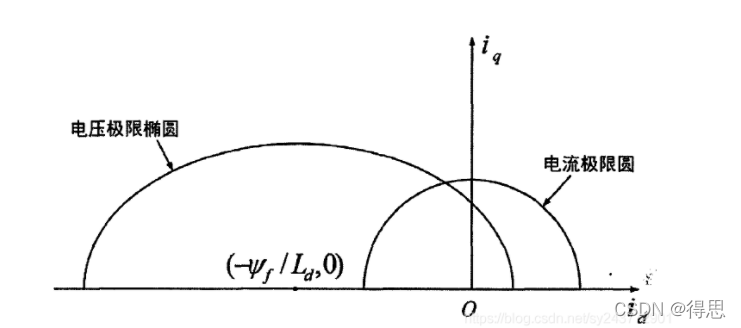
如果要使电机稳定运行,电流矢量的终点必须落在电流极限环和电压极限环的圆之内,否则电机无法稳定运行。
极限转速的计算
由电压极限方程变换可得:
w
e
=
u
l
i
m
(
(
ψ
f
+
L
d
∗
i
d
)
2
+
(
L
d
∗
i
q
)
2
)
w_e=\frac{u_{lim}}{\sqrt{((ψ_f+L_d*i_d)^2+(L_d*i_q)^2)}}
we=((ψf+Ld∗id)2+(Ld∗iq)2)ulim
当电机端电压和电流均为最大值时,且电流全部为直轴分量时,当iq=0,Id = Ilim时可达到理想最高转速:
w
e
m
a
x
=
u
l
i
m
ψ
f
−
L
d
∗
i
l
i
m
w_{emax}=\frac{u_{lim}}{ψ_f-L_d*i_{lim}}
wemax=ψf−Ld∗ilimulim
弱磁扩速的原理
其实弱磁就是控制Id
i
d
=
−
ψ
f
L
d
+
(
U
s
m
a
x
2
w
r
2
)
−
L
q
2
∗
i
q
2
L
d
i_d =-\frac{ψ_f}{L_d} +\frac{\sqrt{(\frac{U_{smax}^2}{w_r^2})-L_q^2*i_q^2}}{L_d}
id=−Ldψf+Ld(wr2Usmax2)−Lq2∗iq2
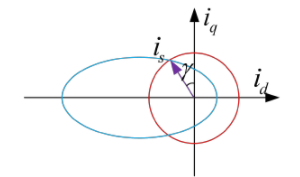
弱磁扩速
超前角是在两相旋转dq坐标系下,定子电流矢量超前q轴的电角度。
超前角弱磁原理:
当转速达到转折速度时,电流调节器仍然处于饱和状态,定子电压已经达到极限状态。如果我们此时通过电压反馈来调解超前角,在到达额定转速后增大,直轴的去磁电流反向增大,交轴电流也随之减少,随着直轴去磁电流的增大,磁通减少。以此实现在不增加逆变器容量的情况下弱磁。
超前角控制图
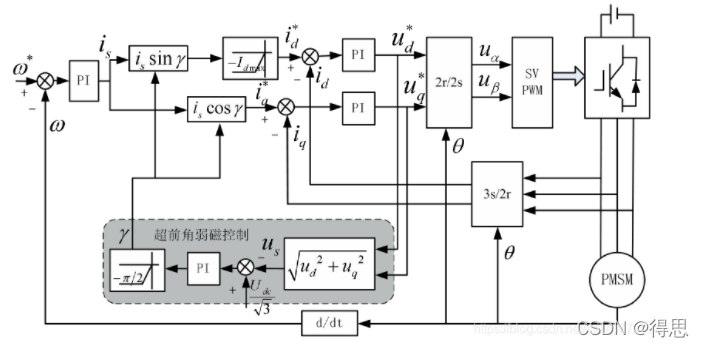
电流调节器的输出ud和uq作为弱磁调节器的输入量,并于逆变器所能输出的最大电压Umax比较,两者的偏差作为弱磁环节的PI调节器的输入,PI调节器输出超前角来调节iq和id的给定。
由于采用SVPWM调制,
U
m
a
x
=
U
d
c
3
U_{max}=\frac{U_{dc}}{\sqrt{3}}
Umax=3Udc
1,当
U
d
2
+
U
q
2
\sqrt{U_{d}^{2}+U_{q}^{2}}
Ud2+Uq2小于Umax时电压PI调节器正向饱和,此时超前角为0,电机运行在恒转矩区
2,当 U d 2 + U q 2 \sqrt{U_{d}^{2}+U_{q}^{2}} Ud2+Uq2大于Umax时电压PI调节器的输入值为负数,调节器开始退出饱和,输出的超前角为负,此时电机运行在弱磁区。
电机数学模型
C 1 = F 1 ∗ R s L s ∗ F p w m C1=\frac{F1*Rs}{Ls*F_{pwm}} C1=Ls∗FpwmF1∗Rs ; F p w m = f p w m 1 F_{pwm}=\frac{f_{pwm}}{1} Fpwm=1fpwm
C 2 = G 1 ∣ G 1 < 0 C2={G1|G1<0} C2=G1∣G1<0
C 3 = F 1 ∗ B E M F m a x L s ∗ I m a x ∗ F p w m C3=\frac{F1*BEMF_{max}} {Ls*I_{max}*F_{pwm}} C3=Ls∗Imax∗FpwmF1∗BEMFmax; B E M F m a x = V m a x ∗ 1.2 ∗ K e ∗ 2 1000 ∗ 3 BEMF_{max}=\frac{V_{max}*1.2*K_e*\sqrt{2}}{1000*\sqrt{3}} BEMFmax=1000∗3Vmax∗1.2∗Ke∗2; I m a x = u r e f 2 ∗ R s h u n t ∗ A M P I_{max}=\frac{u_{ref}}{2*R_{shunt}*AMP} Imax=2∗Rshunt∗AMPuref
C 4 = G 2 ∣ G 2 > 0 C4=G2|G2>0 C4=G2∣G2>0
C 5 = F 1 ∗ R s L s ∗ F p w m ∗ I m a x C5=\frac{F1*Rs}{Ls*F_{pwm}*I_{max}} C5=Ls∗Fpwm∗ImaxF1∗Rs
I ∗ I^* I∗


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









