






探秘Niryo One ROS栈:未来机器人编程的新篇章
Niryo One ROS栈是一个强大的开源项目,专为Niryo One智能机器人设计,它将复杂的机器人操作简化并集成到一个统一的环境中。通过这个项目,你可以用ROS(Robot Operating System)进行机器人编程,并享受无与伦比的交互体验。
项目简介
Niryo One ROS栈提供了在Raspberry Pi 3B上运行所需的所有软件包,支持Xubuntu for ARM。它的目标是让你轻松地控制和编程你的Niryo One机器人。不仅如此,该项目还包括一个图形化的Niryo One Studio,兼容Linux、Windows和MacOS操作系统。
技术分析
Niryo One ROS栈基于ROS Kinetic,确保了稳定性和兼容性。栈中包含了以下关键组件:
robot_state_publisher和moveit!用于机器人状态管理和路径规划。rosbridge_suite用于ROS与Web应用之间的通信。joy处理游戏手柄输入,实现对机器人的远程控制。ros_control和ros_controllers管理电机和传感器数据流。tf2_web_republisher提供时间戳同步的视觉反馈。
此外,项目还集成了jsonpickle库,以方便Python对象序列化。
应用场景
Niryo One ROS栈不仅适用于学术研究,也适合各种工业和教育环境。例如:
- 教育:教学学生机器人技术和自动化。
- 研发:快速原型验证,测试新的算法和控制策略。
- 制造:在生产线上的精准装配和质量检测任务。
- 家庭助手:执行如拾取物品、清洁等家务任务。
项目特点
- 易用性:提供直观的图形界面——Niryo One Studio,使得非程序员也能上手操作。
- 跨平台:支持多种操作系统,包括Linux、Windows和MacOS。
- 模块化:各功能包独立,易于扩展和维护。
- 完整套件:包含从模拟到实际硬件操作的全套解决方案。
- 开放源码:鼓励社区参与,持续优化和完善。
安装与启动
要开始使用,请遵循项目提供的详细安装指南。确保系统已经安装了Ubuntu 16.04和ROS Kinetic。然后,通过克隆仓库,构建并运行所需的ROS包。
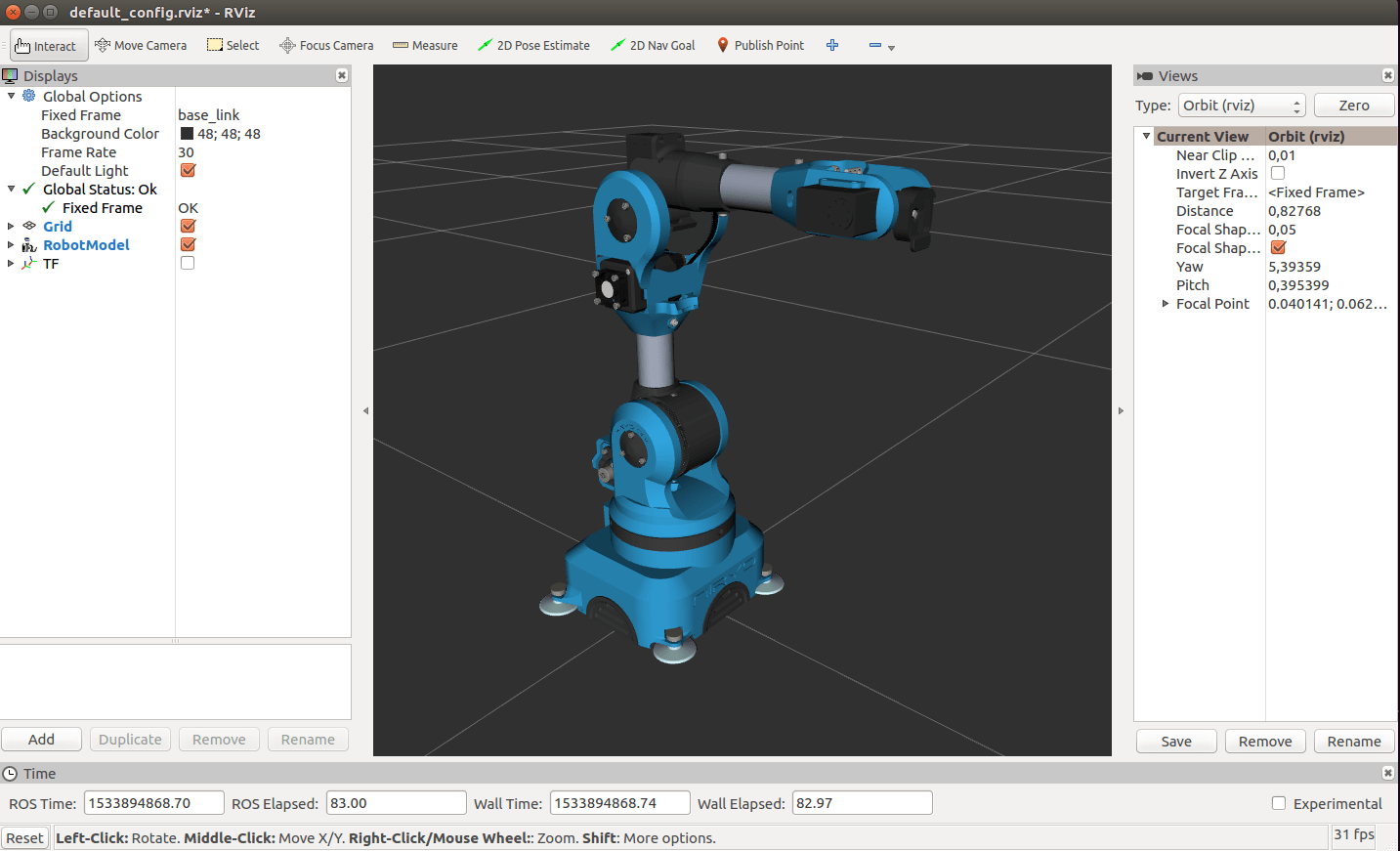
一旦配置完成,你就可以用rviz或desktop_rviz_simulation.launch启动模拟器,开始探索Niryo One的无限可能!
开发者文档与支持
对于开发者而言,Niryo One提供了全面的入门教程和API参考,以及Steve Maassen的C++示例代码。如果你有任何问题,不要犹豫,直接联系他们的支持团队获取帮助。
与Niryo One一起,踏上属于你的机器人编程之旅,体验创新的力量,让未来触手可及!
















 7361
7361

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











