






推荐开源项目:ROS Control Center —— 你的网页版机器人控制台
在机器人操作系统(ROS)的世界中,有效和直观的控制系统是关键的一环。ROS Control Center 正是一款为此设计的强大工具,它以浏览器为载体,通过websocket连接以及roslibjs库,为你提供了一站式控制ROS机器人的解决方案。
1、项目介绍
想象一下,只需打开网页,无需安装任何软件,即可远程监控和操控你的ROS机器人。ROS Control Center就是这样一款工具,它提供了一个清晰的界面来展示节点、话题和服务名称,让你能够轻松订阅消息、调用服务,甚至更改参数。此外,还附带有如控制台输出、电池状态显示、相机流查看等功能,大大提升了你的工作效率。
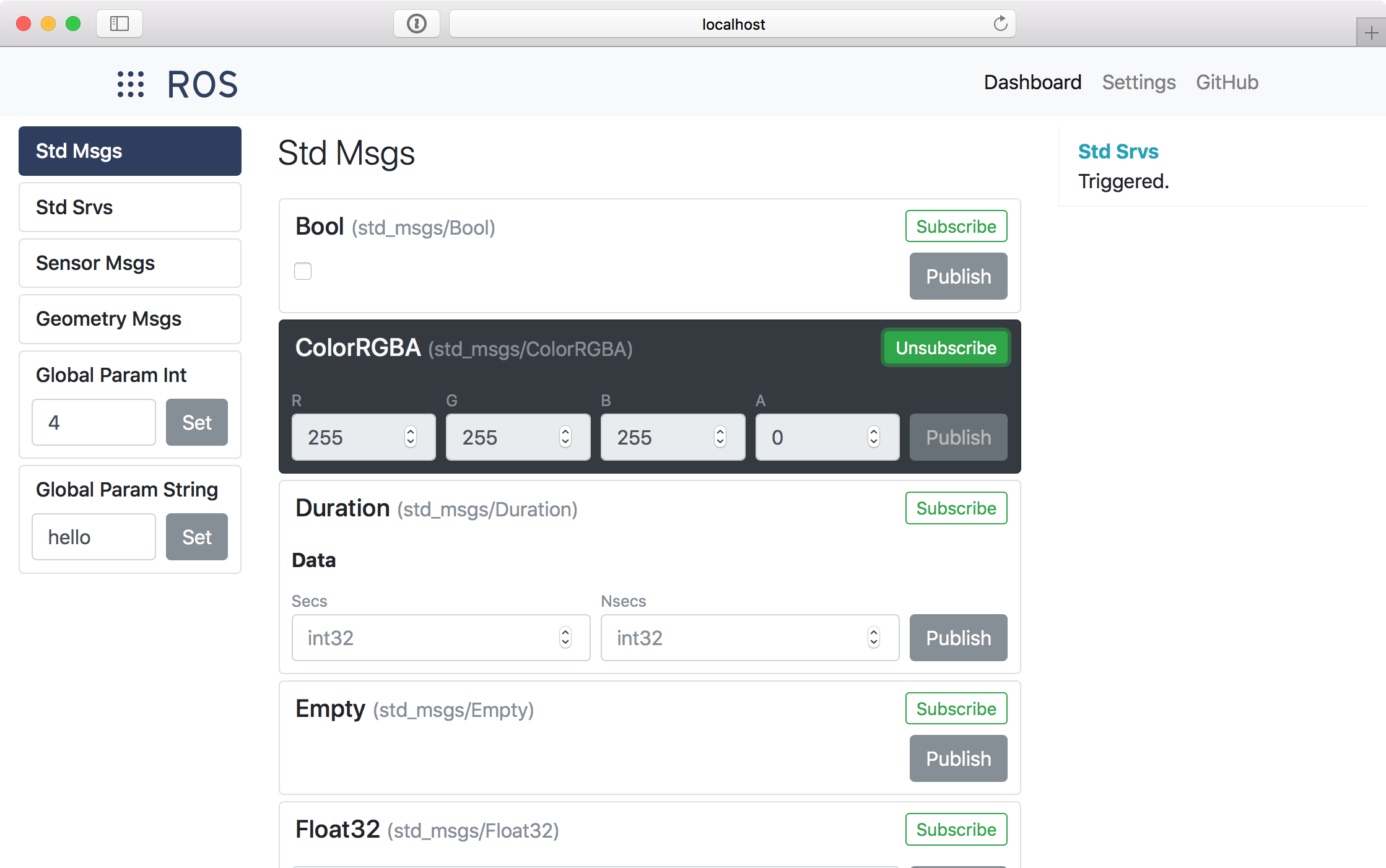 (点击图片可访问项目演示)
(点击图片可访问项目演示)
2、项目技术分析
ROS Control Center构建于现代化的技术栈之上,包括:
- Angular 作为主要的JavaScript框架,负责整个应用的路由和数据绑定。
- Bootstrap 提供了响应式设计,确保在各种设备上都能有良好的用户体验。
- roslibjs 作为与ROS通信的核心库,提供了稳定且高效的接口。
项目还支持自定义消息类型和服务,你可以创建自己的HTML模板来处理特定的消息和服务,实现高度定制化。
3、项目及技术应用场景
- 远程监控:无论你在何处,只要有网络连接,都可以实时查看并控制机器人。
- 教育和研究:对于初学者来说,这款工具提供了直观的ROS概念学习环境,可以快速理解节点、话题和服务的工作方式。
- 开发调试:在开发过程中,便捷地订阅和发布消息,或者查看日志,将极大提升开发效率。
- 自动化系统:集成到更复杂的自动化系统中,作为远程操作和故障排查的入口。
4、项目特点
- 跨平台:可以在任何运行浏览器的设备上使用,不受操作系统限制。
- 易用性:通过分组功能,你可以整理和排序话题、服务和参数,保持工作区整洁有序。
- 高度定制化:允许添加自定义HTML模板,适应不同类型的ROS消息和服务。
- 兼容性强:支持图像和摄像头流,并能与
web_video_server包无缝配合。
如果你正在寻找一个能够简化ROS控制的高效工具,那么ROS Control Center无疑是一个值得尝试的选择。现在就前往项目主页,开始你的ROS旅程吧!
结语
ROS Control Center 是一款开源项目,依赖于社区的力量不断进步和更新。欢迎贡献代码,一起打造更好的ROS控制体验!如果你有任何问题或建议,不要犹豫,立即加入我们吧!
许可证信息
ROS Control Center遵循BSD许可证,完整的条款和条件请参考LICENSE文件。
贡献者列表
感谢所有贡献者的努力,让这个项目不断发展和完善。
















 878
878

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











