







【CVPR2024】Salience DETR: Enhancing Detection Transformer with Hierarchical Salience Filtering Refinement
机构:西安交通大学、浙江大学
论文地址:https://arxiv.org/abs/2403.16131
代码地址:https://github.com/xiuqhou/Salience-DETR
本文主要解决DETR方法中计算量高、小物体难检测的问题,考虑到前景比背景信息更重要,文章提出了分层过滤的机制,仅对前景query进行注意力编码,从而降低计算量。并提出了一系列即插即用的query微调模块来加强query之间的信息交互和融合。Salience-DETR相比DINO降低了30%计算量,速度更快,同时性能更高,与Rank-DETR相当。
文章贡献/创新点
- 分析了目标检测存在的两个问题:冗余性和尺寸偏好。
- 提出分层过滤的机制来从特征图和Transformer layer两个层次对query进行过滤,降低计算量。
- 针对过滤后query之间的特征差异,提出三个即插即用的微调模块提升性能。
- 实验验证了所提方法的有效性,相比DINO降低30%计算量但性能更高。
两阶段DETR存在的问题:冗余性和尺寸偏好
主流的高性能DETR采用两阶段的流程:backbone提取多尺度特征图,一阶段Encoder将特征图映射为query,二阶段Decoder筛选最重要的 n n n个query进行解码,并通过检测头将其映射为检测结果。文章发现两阶段筛选出的query存在两个问题:
- 冗余性:很多query并没有匹配到物体上,存在冗余性。
- 尺寸偏好:很多query会重复地匹配到大目标上,而有些小目标则匹配不到query,导致小尺寸目标难以被检测到。
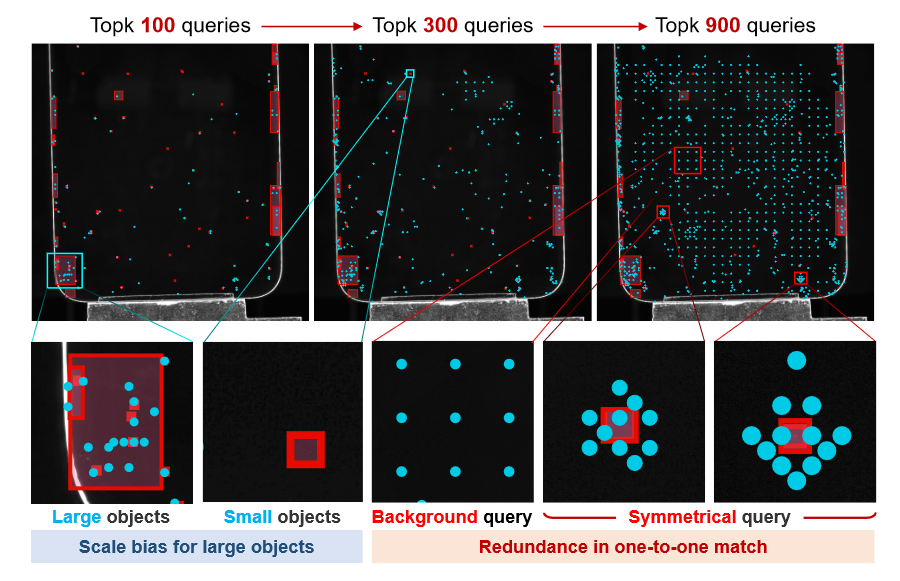
文章对此提出了Salience-DETR,在Encoder中引入了分层过滤机制,在Decoder之前的筛选过程引入了微调机制,来解决这些问题。
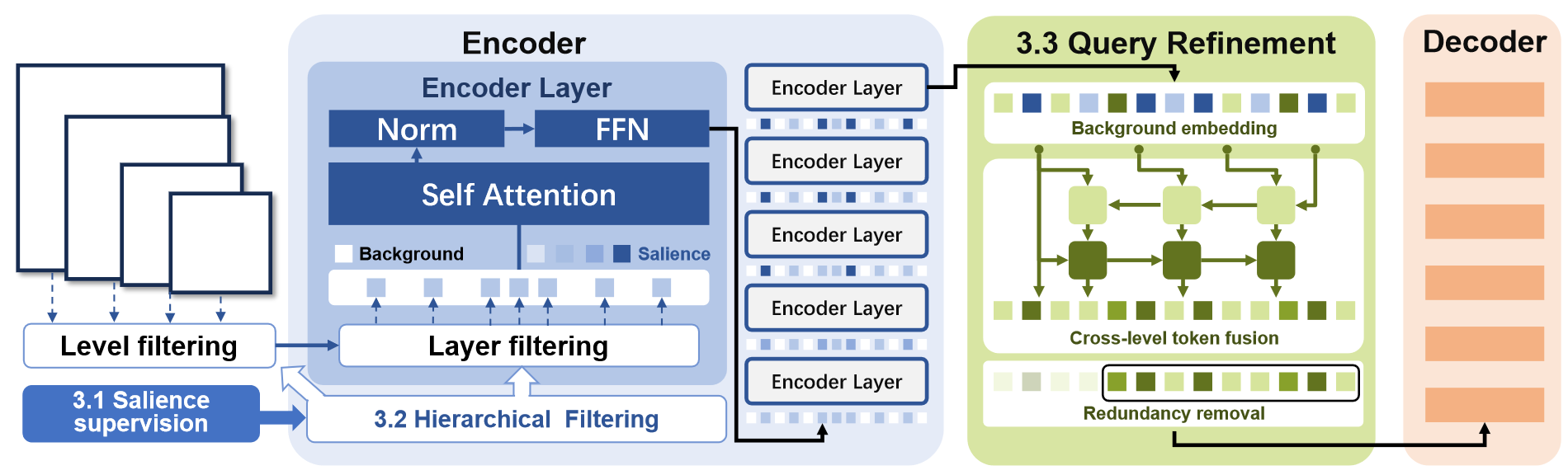
分层过滤机制
Salience-DETR引入了额外的MLP去预测query的显著性分数,仅过滤出最显著的query进行Encoder编码,从而降低计算量。
显著性分数
通常来说,离目标越近的query越重要,且前景比背景重要,中心比边缘重要。已有工作Focus-DETR是将处于背景区域的query分数设为0,前景分数设为1,来强调前景比背景重要。Salience-DETR则进一步让分数随着与物体中心的距离增加而逐渐衰减,接近物体中心的query分数接近1,接近物体边缘的query分数接近0,以强调中心比边缘重要:
θ l ( i , j ) = { d ( c , D B b o x ) , c ∈ D B b o x 0 , c ∉ D B b o x \theta_l^{(i,j)}=\left\{ \begin{aligned} d(\boldsymbol c,\mathcal D_{Bbox}),\boldsymbol c\in\mathcal D_{Bbox}\\ 0~~~~~~~,\boldsymbol c\notin\mathcal D_{Bbox} \end{aligned} \right. θl(i,j)={d(c,DBbox),c∈DBbox0 ,c∈/DBbox
其中 c = ( x , y ) \boldsymbol c=(x,y) c=(x,y)表示每个query在特征图上的坐标, c ∈ D B b o x \boldsymbol c\in\mathcal D_{Bbox} c∈DBbox表示处于目标框中的物体。对于处于目标框中的物体,按照如下规则进行衰减:
d ( c , D B b o x ) = 1 − 2 ( Δ x w ) 2 + 2 ( Δ y h ) 2 d(\boldsymbol c, \mathcal D_{Bbox})=1-\sqrt{2\left(\frac{\Delta x}w\right)^2+2\left(\frac{\Delta y}h\right)^2} d(c,DBbox)=1−2(wΔx)2+2(hΔy)2
其中 Δ x \Delta x Δx和 Δ y \Delta y Δy表示query在横纵坐标上距离物体中心的距离。这样无论目标大小如何,其中心区域总是最显著的,可视化后如下图:
在代码实现中,query会和每个物体中心计算距离delta_x和delta_y,按照上面公式query可以和每个box的都计算出一个显著性confidence_per_box,由于query可能处于多个框的前景区域,代码取最高的框的显著性作为query的显著性,即代码中的mask,最后将背景区域的mask设置为0。
def get_mask_single_level(self, coord_x, coord_y, gt_boxes, level_idx):
# gt_label: (m,) gt_boxes: (m, 4)
# coord_x: (h*w, )
left_border_distance = coord_x[:, None] - gt_boxes[None, :, 0] # (h*w, m)
top_border_distance = coord_y[:, None] - gt_boxes[None, :, 1]
right_border_distance = gt_boxes[None, :, 2] - coord_x[:, None]
bottom_border_distance = gt_boxes[None, :, 3] - coord_y[:, None]
border_distances = torch.stack(
[left_border_distance, top_border_distance, right_border_distance, bottom_border_distance],
dim=-1,
) # [h*w, m, 4]
# the foreground queries must satisfy two requirements:
# 1. the quereis located in bounding boxes
# 2. the distance from queries to the box center match the feature map stride
min_border_distances = torch.min(border_distances, dim=-1)[0] # [h*w, m]
max_border_distances = torch.max(border_distances, dim=-1)[0]
mask_in_gt_boxes = min_border_distances > 0
min_limit, max_limit = self.limit_range[level_idx]
mask_in_level = (max_border_distances > min_limit) & (max_border_distances <= max_limit)
mask_pos = mask_in_gt_boxes & mask_in_level
# scale-independent salience confidence
row_factor = left_border_distance + right_border_distance
col_factor = top_border_distance + bottom_border_distance
delta_x = (left_border_distance - right_border_distance) / row_factor
delta_y = (top_border_distance - bottom_border_distance) / col_factor
confidence = torch.sqrt(delta_x**2 + delta_y**2) / 2
confidence_per_box = 1 - confidence
confidence_per_box[~mask_in_gt_boxes] = 0
# process positive coordinates
if confidence_per_box.numel() != 0:
mask = confidence_per_box.max(-1)[0]
else:
mask = torch.zeros(coord_y.shape, device=confidence.device, dtype=confidence.dtype)
# process negative coordinates
mask_pos = mask_pos.long().sum(dim=-1) >= 1
mask[~mask_pos] = 0
# add noise to add randomness
mask = (1 - self.noise_scale) * mask + self.noise_scale * torch.rand_like(mask)
return mask
分层过滤
上面得到的显著性分数作为真值去监督训练MLP,MLP输出每层特征图 f l \boldsymbol f_l fl对应的显著性分数 s l \boldsymbol s_l sl,用于对相应的query进行排序和过滤。MLP的流程与Focus-DETR一致,低层特征图在 f l − 1 \boldsymbol f_{l-1} fl−1会和高一层特征图的预测结果 s l \boldsymbol s_l sl进行加权,加权后的结果作为MLP的输入,权重 α l \alpha_l αl作为网络参数自适应去学习。
s l − 1 = M L P F ( f l − 1 ( 1 + U P ( α l ∗ s l ) ) ) \boldsymbol s_{l-1}=\mathbf{MLP}_\mathbf F(\boldsymbol f_{l-1}(1+\mathbf{UP}(\alpha_l*\boldsymbol s_l))) sl−1=MLPF(fl−1(1+UP(αl∗sl)))
相应的代码实现如下,由高到低进行预测query的重要性分数,高层分数上采样后得到upsample_score,该分数会和低层特征图level_memory加权,权重self.alpha[level_idx]即
α
l
\alpha_l
αl,加权后的结果送入enc_mask_predictor网络预测低层query的重要性分数score。
# from high level to low level
batch_size = feat_flatten.shape[0]
selected_score = []
selected_inds = []
salience_score = []
for level_idx in range(spatial_shapes.shape[0] - 1, -1, -1):
start_index = level_start_index[level_idx]
end_index = level_start_index[level_idx + 1] if level_idx < spatial_shapes.shape[0] - 1 else None
level_memory = backbone_output_memory[:, start_index:end_index, :]
mask = mask_flatten[:, start_index:end_index]
# update the memory using the higher-level score_prediction
if level_idx != spatial_shapes.shape[0] - 1:
upsample_score = torch.nn.functional.interpolate(
score,
size=spatial_shapes[level_idx].unbind(),
mode="bilinear",
align_corners=True,
)
upsample_score = upsample_score.view(batch_size, -1, spatial_shapes[level_idx].prod())
upsample_score = upsample_score.transpose(1, 2)
level_memory = level_memory + level_memory * upsample_score * self.alpha[level_idx]
# predict the foreground score of the current layer
score = self.enc_mask_predictor(level_memory)
valid_score = score.squeeze(-1).masked_fill(mask, score.min())
score = score.transpose(1, 2).view(batch_size, -1, *spatial_shapes[level_idx])
# get the topk salience index of the current feature map level
level_score, level_inds = valid_score.topk(level_token_nums[level_idx], dim=1)
level_inds = level_inds + level_start_index[level_idx]
salience_score.append(score)
selected_inds.append(level_inds)
selected_score.append(level_score)
文章会根据预测得到的 s l \boldsymbol s_l sl对query进行降序排序,并在特征图层次和编码器层次两个进行过滤,即分层过滤机制。
-
特征图层次:每层特征图仅保留 w l w_l wl比例的query,越高层特征图 w l w_l wl越大,然后将保留的query合并到一起送入Encoder。
-
编码器层次:合并后的query按照合并后的 s \boldsymbol s s继续降序排序,在经过每层编码层 t t t时,只有其中 w t w_t wt比例的query会进行注意力编码,其他query不做处理:
q i = { A t t e n t i o n ( q i + p o s i , q + p o s , q ) , if q i ∈ Ω t q i , if ( q i ∉ Ω t ) q_i=\left\{ \begin{aligned} \mathrm{Attention}(q_i+pos_i,\boldsymbol q+\boldsymbol{pos},\boldsymbol q),&~\text{if} q_i\in\Omega_t\\ q_i~~~~~~~~~~~~~~~~~~~~~~~,&~\text{if}(q_i\notin\Omega_t) \end{aligned} \right. qi={Attention(qi+posi,q+pos,q),qi , ifqi∈Ωt if(qi∈/Ωt)
Query微调机制
文章认为过滤后的query之间存在语义差异,那些经过Transformer编码的query可能具有更强的语义信息,而没有经过处理的query语义信息较弱。因此引入了三个即插即用的微调模块来加强前后景、不同query之间的信息交互和融合。模块的输入和输出都是query。
-
背景嵌入:定义两个embedding分别表示行嵌入 r ( i ) \boldsymbol r^{(i)} r(i)和列嵌入 c ( j ) \boldsymbol c^{(j)} c(j),每个背景query(即从来没有被筛选到得query)会按照其特征图层次 l l l、像素坐标 ( i , j ) (i,j) (i,j)增加相应的行列嵌入,前景则不做处理:
b l ( i , j ) = C o n c a t ( r ( i ) , c ( j ) ) \boldsymbol b_l^{(i,j)}=\mathrm{Concat}(\boldsymbol r^{(i)},\boldsymbol c^{(j)}) bl(i,j)=Concat(r(i),c(j))
这里其实跟MAE差不多,都是为背景token加上网络自适应学习的embedding。不同之处在于MAE会为所有背景token增加相同的单个embedding,Salience-DETR则是定义了一组行embedding和列embdding,然后根据位置来选择embedding。
-
跨层融合:增加背景嵌入后,query会使用YOLO中常用的PANet进行多尺度特征融合,只不过将其中的融合模块改进成如下的形式:
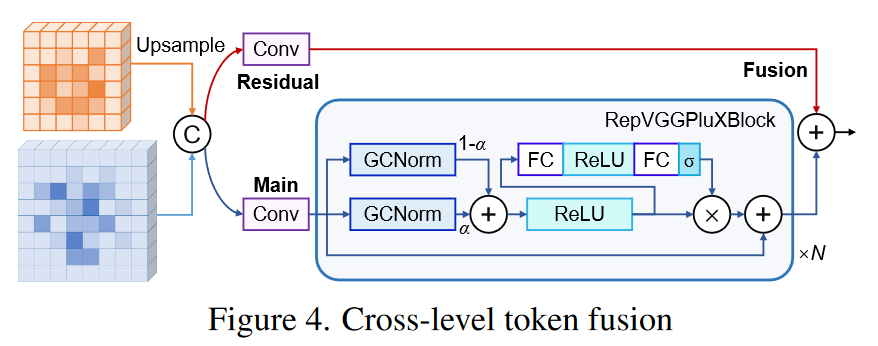
-
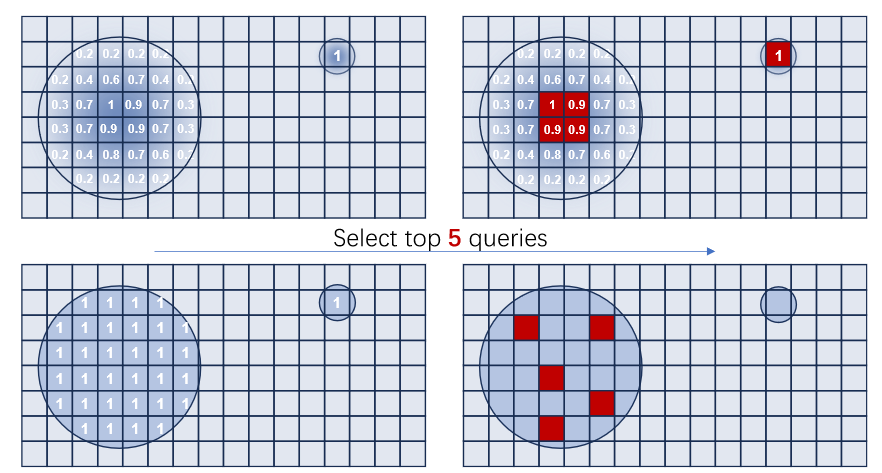
去重:在输入Decoder之前,会去除位置近邻的query来降低重复性。本文以每个query为中心定义了一个3*3的框,然后对框进行NMS,这样如果有query处于3*3网格内,只有其中的1个会被保留。
B b o x l ( i , j ) = [ i − 1 , j − 1 , i + 1 , j + 1 ] Bbox_l^{(i,j)}=[i-1,j-1,i+1,j+1] Bboxl(i,j)=[i−1,j−1,i+1,j+1]
实验结果
从消融实验看,基本每个模块都会提升一些性能,其中微调模块中的背景嵌入和去重并不会增加FLOPs
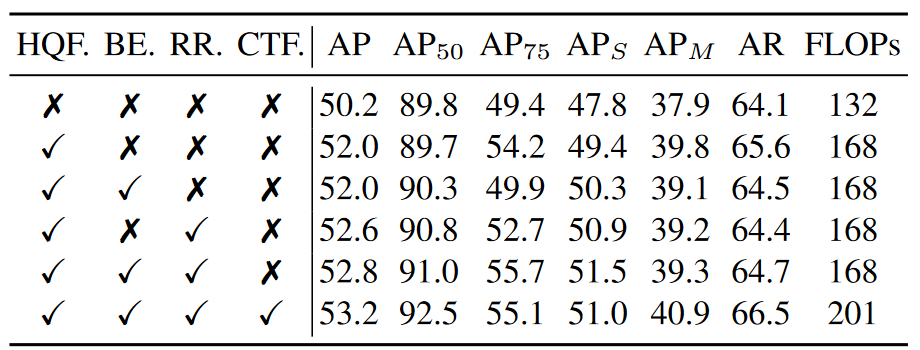
模型性能比DINO和AlignDETR要高,和Stable-DINO和Rank-DETR差不多,优势在于速度快。
| Model | backbone | mAP | AP50 | AP75 | APS | APM | APL | Download |
|---|---|---|---|---|---|---|---|---|
| Salience DETR | ResNet50 | 50.0 | 67.7 | 54.2 | 33.3 | 54.4 | 64.4 | config / checkpoint |
| Salience DETR | ConvNeXt-L | 54.2 | 72.4 | 59.1 | 38.8 | 58.3 | 69.6 | config / checkpoint |
| Salience DETR | Swin-L(IN-22K) | 56.5 | 75.0 | 61.5 | 40.2 | 61.2 | 72.8 | config / checkpoint |
| Salience DETR | FocalNet-L(IN-22K) | 57.3 | 75.5 | 62.3 | 40.9 | 61.8 | 74.5 | config / checkpoint |
24 epoch setting
| Model | backbone | mAP | AP50 | AP75 | APS | APM | APL | Download |
|---|---|---|---|---|---|---|---|---|
| Salience DETR | ResNet50 | 51.2 | 68.9 | 55.7 | 33.9 | 55.5 | 65.6 | config / checkpoint |
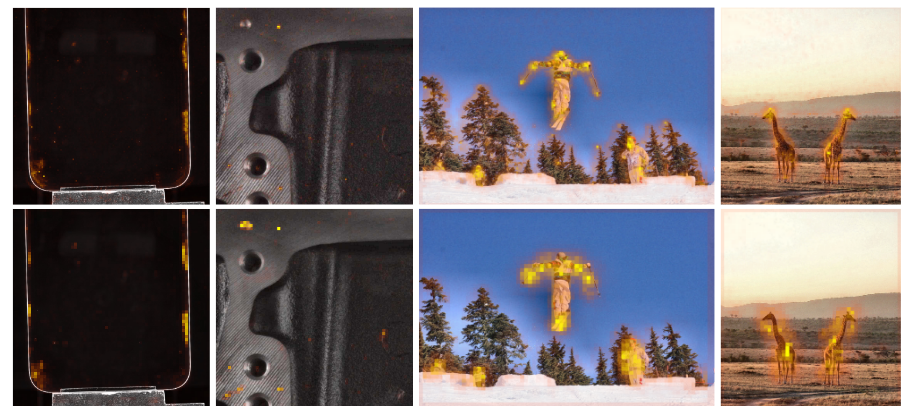
另外一个有意思的点在于,文章虽然只用了检测框标注,但网络预测出的显著性却能够大致匹配到物体轮廓,达到某种程度上分割的效果,也许可以扩展到分割任务。

















 60
60

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









