






奈奎斯特频率(Nyquist Frequency)
奈奎斯特频率是信号采样中的一个关键概念,定义为采样率的一半。具体来说,如果一个连续信号以 f s f_s fs的采样率进行采样,那么奈奎斯特频率是:
f Nyquist = f s 2 f_{\text{Nyquist}} = \frac{f_s}{2} fNyquist=2fs
该概念来源于奈奎斯特采样定理(也称为奈奎斯特–香农采样定理),该定理指出,一个连续的带限信号(即,最高频率成分为 f m f_m fm)可以通过其采样值完全恢复,只要采样率 f s f_s fs满足:
f s > 2 f m f_s > 2f_m fs>2fm
为什么奈奎斯特频率重要?
-
防止混叠(Aliasing): 如果采样信号中包含高于奈奎斯特频率的频率成分,这些高频成分会与低频成分混叠,导致无法准确地从采样信号中恢复出原始信号。
-
滤波器设计: 在数字信号处理中,了解奈奎斯特频率有助于设计高效的滤波器。
-
信息保留: 遵循奈奎斯特定理可以确保在信号的采样和重构过程中不会丢失信息。
-
系统性能: 在如通信、音频处理、图像处理等多个应用领域中,奈奎斯特频率的概念用于优化系统性能。
奈奎斯特频率推导


这意味着式所描述的组中只有N个不同的周期复指数序列。进一 步,组中的所有成员均具有N个样本的公共周期。
如果以Fs= 1/T个样本/s的采样率进行周期采样 , 那么有
两个频率变扯F和f呈线性关系
连续时间正弦信号的频率F的范围是:

由于离散时间正弦信号的范围是
不难得到:

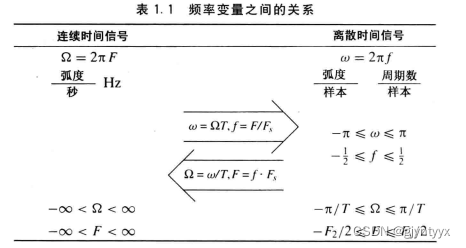
由此可以得出连续时间信号的最高频率为采样频率的二分之一,那对于频率大于Fs/2的信号:
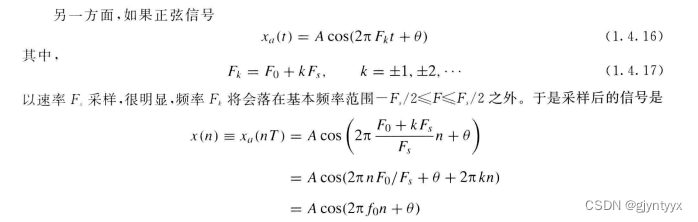
Fk在采样后与F0是无法区分的,他们是F0的混叠。
为了避免混叠情况的出现,就要求采样频率大于两倍信号频率。
这就得到了采样定理。
采样定理 如果包含在某个模拟信号互Xa(t)中的最高频率是Fmax= B,而信号以采样率Fs>2Fmax=2B采样,那么Xa(t)可以从样本值准确恢复。
初始弛豫
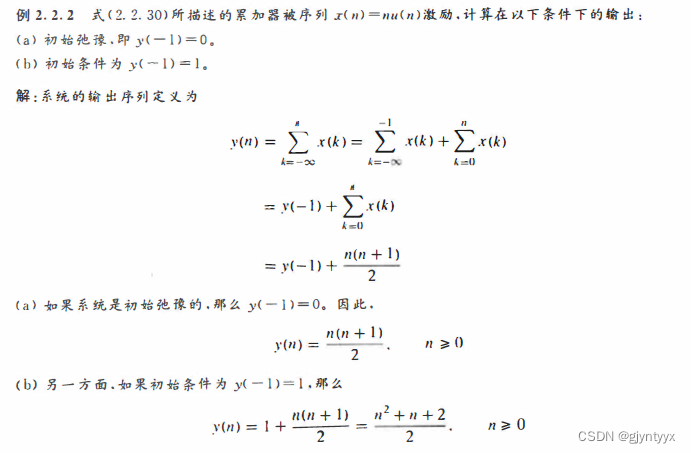
如果累加器在 n 0 n_0 n0之前没有激励,那么初始条件 y ( n 0 − 1 ) = 0 y(n_0-1) = 0 y(n0−1)=0在这种情况下,我们说该系统为起始弛豫的。 因为 y ( n 0 − 1 ) = 0 y(n_0-1) = 0 y(n0−1)=0,所以输出序列 y(n) 只依赖于 n > = n 0 n>=n_0 n>=n0时的输入序列 x(n) 。
例子:
离散时间系统的分类
静态系统与动态系统:
如果一个离散时间系统在任意时刻n的输出至多依赖于同一时刻的输入样本,而与过去或者将来的输入样本无关,那么该系统就称为静态的或者无记忆的。
如果系统在时刻n的输出完全由区间n-N (N>=0)到n内的输入样本确定,那么称该系统具有持续时间为N的记忆。如果N=0,那么系统是 静态的。如果0<N<∞,那么系统称为有限记忆的。但是,如果N=∞,那么系统称为无限记忆的。
静态:
动态:
时不变系统与时变系统
我们可以把一般的系统类别相分为两大类:时不变系统和时变系统。 如果系统的输入输出特性不随着时间变化,那么该系统称为时不变系统。
一 个任意的输入序列 x(n) 激励系统,产生一个输出序列,记为 y(n) 。将输入序列延迟一定数量K并重新计算输出。 通常,输出可以写为

如果对于所有可能的K值,输出 y(n,k)=y(n-k)那么该系统就是时不变的。即使只对一个K值,输出 y(n,k)≠y(n-k),那么该系统就是时变的。
线性系统与非线性系统
一般的系统类别还可再分为线性系统和非线性系统。满足叠加性的系统就是线性系统。简单说明一下,叠加性要求系统对信号加权和的响应等于系统对每个独立输入信号对应的响应(输出)的加权和。
因果系统与非因果系统
如果一个系统打任意时刻II的输出[即y(n)]仅依赖于当前和过去的输入[即x(n),x(n-1),x(n-2),…],而与将来的输入[即.x(n+1),x(n + 2), ·· ·]无关那么这个系统就称为是因果的。当n<0时h(n)=0。因此,一个LTI系统是因果的,当且仅当它的冲激响应在n为负值时为零。
如果一个因果线性时不变系统的输入是因果序列[即如果n<0时x(n)=0],那么卷积公式的 界限还可以进一步被约束。在这种情况下,卷积公式的两个等价形式变为
稳定系统与不稳定系统
稳定是系统的一个重要属性,一个任意的弛豫系统称为有界输入一有界输出(BIBO) 稳定,当且仅当每个有界输入产生有界的输出。
输入序列x(n) 和输出序列 y(n)有界的条件转换到数学上,就意味着存在某些有限数,比如说Mx和My,并且对所有的n,使得


当系统稳定时,系统输入端的任何有限长激励,产生的输出实际上是" 瞬时的 “ , 即幅度随着时间衰减并最终消失。
如果对某些有界输入序列x(n),输出是无界(无限)的,那么该系统归为不稳定系统。
卷积
卷积推导
线性时不变系统




可交换:
卷积公式为我们提供了一种计算弛豫线性时不变系统对任意输入信号的响应方法。我们可以采用两种等价形式中的一种,其中,x(n)是系统的 输入信号,h(n)是系统的冲激响应,y(n)是响应输入信号的系统输出。
卷积计算
x(n)(N1 -> N2)、h(n)(N3 -> N4)可交换
y(n)下标取值范围:N1+N3 -> N2+N4(可以看出下标范围同样满足可交换


卷积求法
解析法:适用于非常长的序列计算;
图解法:适用于短序列计算;
对数相乘法:适用于短序列,最容易算;(步骤:1、不进位的乘法运算;2、确定范围,从而确定零点)
矩阵表示:方便表示,也容易计算:y = xH or y = hX;
卷积性质
线性性(Linearity)
卷积是一个线性运算,这意味着:
a ( f ∗ g ) + b ( h ∗ i ) = a ( f ∗ g ) ∗ 1 + 1 ∗ b ( h ∗ i ) = ( a f ) ∗ g + h ∗ ( b i ) a(f * g) + b(h * i) = a(f * g) * 1 + 1 * b(h * i) = (af) * g + h * (bi) a(f∗g)+b(h∗i)=a(f∗g)∗1+1∗b(h∗i)=(af)∗g+h∗(bi)
交换律(Commutative)
卷积运算是可交换的,即 f ∗ g = g ∗ f f * g = g * f f∗g=g∗f。
结合律(Associative)
卷积运算是可结合的,即 ( f ∗ g ) ∗ h = f ∗ ( g ∗ h ) (f * g) * h = f * (g * h) (f∗g)∗h=f∗(g∗h)。
分配律(Distributive)
卷积运算是可分配的,即 f ∗ ( g + h ) = f ∗ g + f ∗ h f * (g + h) = f * g + f * h f∗(g+h)=f∗g+f∗h。
恒等元和零元
卷积有一个恒等元,通常是一个单位冲激函数 δ ( t ) \delta(t) δ(t),满足 f ∗ δ ( t ) = f ( t ) f * \delta(t) = f(t) f∗δ(t)=f(t)。同样,零函数是卷积的零元,满足 f ∗ 0 = 0 f * 0 = 0 f∗0=0。
时移性质(Time-Shifting)
如果 g ( t ) = f ( t − T ) g(t) = f(t - T) g(t)=f(t−T),那么 g ( t ) ∗ h ( t ) = f ( t − T ) ∗ h ( t ) g(t) * h(t) = f(t - T) * h(t) g(t)∗h(t)=f(t−T)∗h(t),结果是 g ∗ h g * h g∗h相对于 f ∗ h f * h f∗h有一个 T T T的时移。
频域乘积(Frequency Domain Multiplication)
在频域中,卷积转换为乘积。这一性质是基于傅里叶变换的。如果 F ( f ) F(f) F(f)和 G ( f ) G(f) G(f)分别是 f ( t ) f(t) f(t)和 g ( t ) g(t) g(t)的傅里叶变换,那么 f ∗ g f * g f∗g的傅里叶变换是 F ( f ) G ( f ) F(f)G(f) F(f)G(f)。
差分方程描述离散时间系统
具有有限长冲激响应(FIr)的系统和具有无限长冲激响应(IIr)的系统
在IIr这类一般系统中,差分方程更便于描述这一类离散 时间系统。
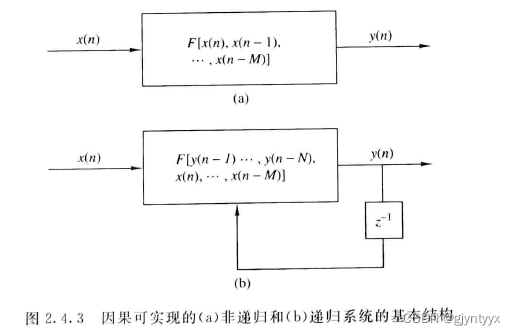
递归系统(recursive Systems)
递归系统是一种数字信号处理系统,其中当前的输出不仅取决于当前和过去的输入,还取决于过去的输出。递归系统通常用差分方程来描述,这样的方程可能具有以下一般形式:
y [ n ] = ∑ k = 0 M a k y [ n − k ] + ∑ k = 0 N b k x [ n − k ] y[n] = \sum_{k=0}^{M} a_k y[n-k] + \sum_{k=0}^{N} b_k x[n-k] y[n]=k=0∑Maky[n−k]+k=0∑Nbkx[n−k]
这里, a k a_k ak和 b k b_k bk是系统参数, y [ n ] y[n] y[n]是系统的输出, x [ n ] x[n] x[n]是系统的输入。
非递归系统(Non-recursive Systems)
非递归系统,也称为前馈系统,是一种系统,其中当前的输出仅取决于当前和过去的输入,而与过去的输出无关。非递归系统通常用以下一般形式的差分方程来描述:
y [ n ] = ∑ k = 0 N b k x [ n − k ] y[n] = \sum_{k=0}^{N} b_k x[n-k] y[n]=k=0∑Nbkx[n−k]
与递归系统相比,非递归系统更容易分析和实现,但它们可能需要更多的内存来存储过去的输入。
比较
- 稳定性:递归系统可能是不稳定的,而非递归系统总是稳定的。
- 实现:递归系统通常需要更少的计算资源,但更难以实现和分析。
- 记忆:递归系统具有“记忆”,因为它们的输出取决于过去的输出。非递归系统没有这种记忆。
- 响应:递归系统能够更容易地实现无限持续的响应(如IIr滤波器),而非递归系统通常只能实现有限持续的响应(如FIr滤波器)。
线性常系数方程
y
[
n
]
=
∑
k
=
0
M
a
k
y
[
n
−
k
]
+
∑
k
=
0
N
b
k
x
[
n
−
k
]
y[n] = \sum_{k=0}^{M} a_k y[n-k] + \sum_{k=0}^{N} b_k x[n-k]
y[n]=k=0∑Maky[n−k]+k=0∑Nbkx[n−k]

整数N称为差分方程的阶或者系统的阶。
零输入响应(Zero-Input response)
零输入响应是系统在没有外部输入(即输入为零)的情况下由其初始条件产生的输出。对于线性时不变(LTI)系统,这通常由系统的自然响应或本质响应来描述。非零初始条件的递归系统是非弛豫的,这可理解为即使没有被激励,它也能产生输出。 注意,零输入响应是由千系统的记忆。对于一个给定的差分方程:
y [ n ] = ∑ k = 0 M a k y [ n − k ] + ∑ k = 0 N b k x [ n − k ] y[n] = \sum_{k=0}^{M} a_k y[n-k] + \sum_{k=0}^{N} b_k x[n-k] y[n]=k=0∑Maky[n−k]+k=0∑Nbkx[n−k]
当 x [ n ] = 0 x[n] = 0 x[n]=0(即没有输入)并且系统具有某些初始条件(即 y [ − 1 ] , y [ − 2 ] , … y[-1], y[-2], \ldots y[−1],y[−2],…是已知的)时,由此产生的 y [ n ] y[n] y[n]就是零输入响应。
零状态响应(Zero-State response)
零状态响应是系统在初始条件都是零(即系统处于“静止”状态)但有一个非零输入的情况下的输出。使用上面相同的差分方程,当 y [ n ] y[n] y[n]的初始值都是零,但 x [ n ] x[n] x[n]是非零时,由此产生的 y [ n ] y[n] y[n]就是零状态响应。
零输入响应与零状态响应的结合
在许多实际应用中,一个系统的总响应是零输入响应和零状态响应的叠加。这是因为许多系统都是线性和时不变的(LTI),在这种情况下,这两种响应可以独立计算并叠加以获得系统的总响应:
y total [ n ] = y zero-input [ n ] + y zero-state [ n ] y_{\text{total}}[n] = y_{\text{zero-input}}[n] + y_{\text{zero-state}}[n] ytotal[n]=yzero-input[n]+yzero-state[n]
常系数方程的线性、时不变性、稳定性
线性
1.总响应等于零输入响应和零状态响应之和。
2. 零状态响应(零状态线性)满足叠加法则。
3. 零输入响应(零输入线性)满足叠加法则。
时不变
因为系数ak和bk是常数,所以系统是时不变的。 如果这些系数中的一个或者多个跟时间有关,那么该系统就是时变的,这是因为它的特性是按时间的函数进行变化的。 从而得出结论:由线性常系数差分方程所描述的递归系统是线性时不变的。
稳定性
对于可能是非线性的非弛豫系统,它的BIBO稳定性需要细心观察。 对千可能是非线性的非弛豫系 统,它的BIBO稳定性需要细心观察。 然而,在由线性常系数差分方程
y
[
n
]
=
∑
k
=
0
M
a
k
y
[
n
−
k
]
+
∑
k
=
0
N
b
k
x
[
n
−
k
]
y[n] = \sum_{k=0}^{M} a_k y[n-k] + \sum_{k=0}^{N} b_k x[n-k]
y[n]=∑k=0Maky[n−k]+∑k=0Nbkx[n−k]
所描述的线性时不变递归系统的情况下,弛豫系统的有界输入一有界输出(BIBO)稳定性的概念可以充分说明,这样的系统是BIBO稳定.当且仅当对每个有界输入和每个有界初始条件,系统的总响应是有界的。
线性常系数差分方程求解
零输入/零状态响应、自然/受迫响应、暂态/稳态响应区分
自然响应就是齐次解,受迫响应就是特殊解。
当时间趋向无穷时,如果系统响应也趋向无穷,那么这样的系统通常是不稳定的,而非处于稳态响应。在控制系统和信号处理的语境中,稳态响应通常是指系统在长时间后达到的一个平衡或稳定状态,而这个状态通常是有限的。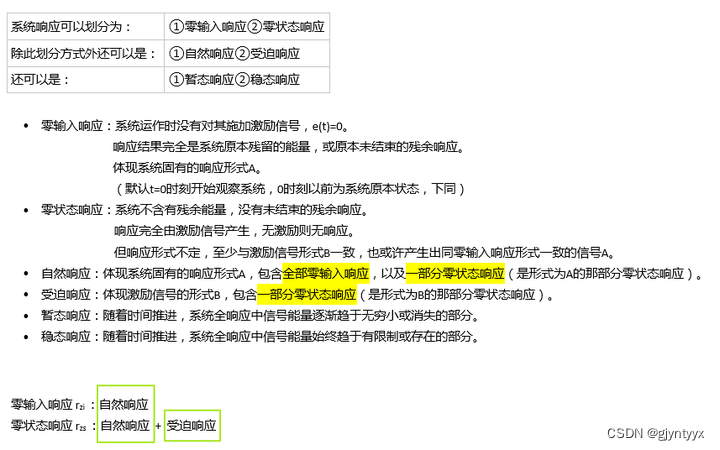
](https://img-blog.csdnimg.cn/93ea7aa8f51a495aa6342b8576e724d5.png)
直接方法
例题:
计算上式的零输入/零状态响应、自然/受迫响应、暂态/稳态响应,输入序列为
起始条件 y ( − 1 ) = 5 , y ( − 2 ) = 0 y(-1)=5,y(-2)=0 y(−1)=5,y(−2)=0


方法1
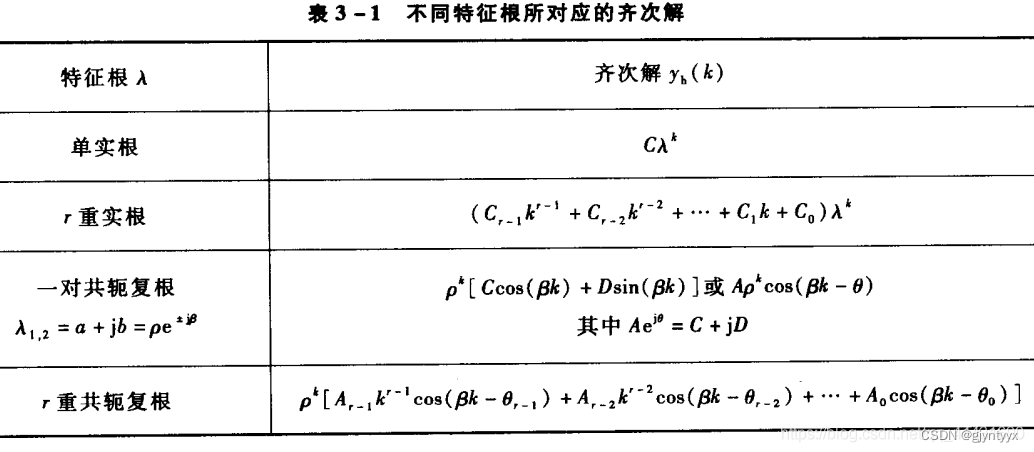
1.由系统方程求得特征根
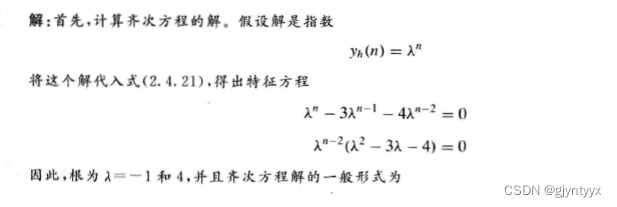
并由下表得到齐次解形式

这里 C , C 0 , C 1 , … , C r − 1 C, C_0, C_1, \ldots, C_{r-1} C,C0,C1,…,Cr−1 是由初始条件或起始条件确定的常数。
-
将齐次解代入起始条件,可得到零输入响应:

-
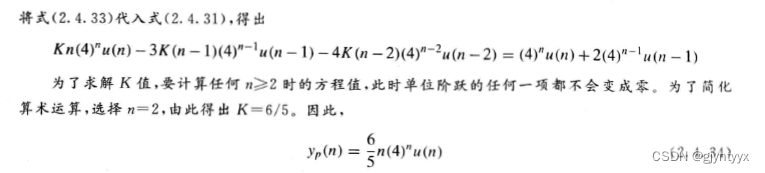
根据激励序列形式得到特解形式:

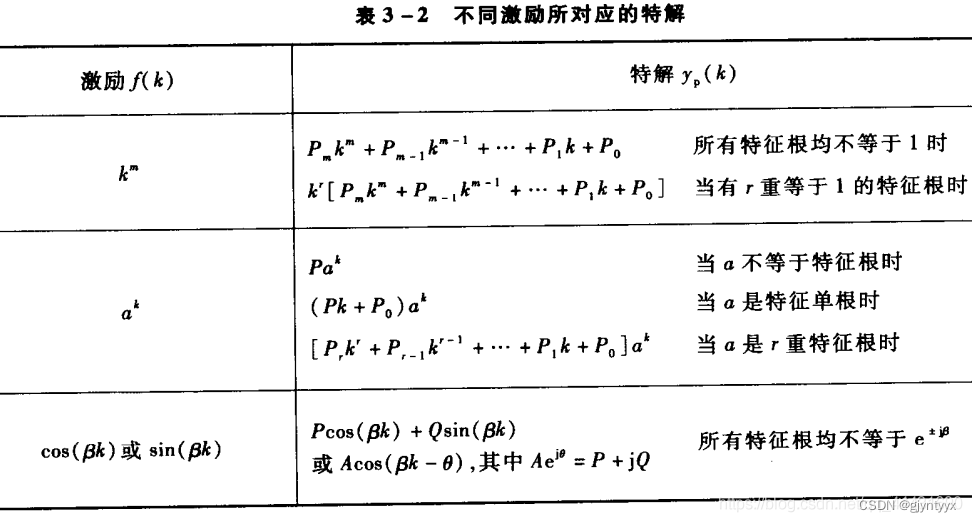
- 代入二阶差分方程,计算可得受迫响应:
- 目前可得到全解为:

代入初始条件可得零状态响应:
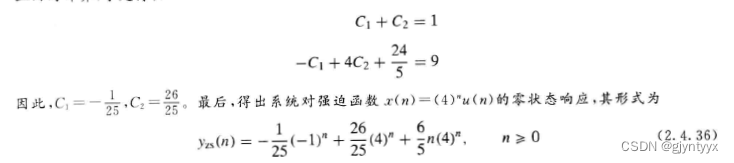
- 零状态响应+零输入响应就是全解
y = − 26 25 ( − 1 ) n + 426 25 ( 4 ) n + 6 5 n ( 4 ) n y=-\frac{26}{25}(-1)^n+\frac{426}{25}(4)^n+\frac{6}{5}n(4)^n y=−2526(−1)n+25426(4)n+56n(4)n
−
26
25
(
−
1
)
n
+
426
25
(
4
)
n
-\frac{26}{25}(-1)^n+\frac{426}{25}(4)^n
−2526(−1)n+25426(4)n为自然响应(齐次解)
6
5
n
(
4
)
n
\frac{6}{5}n(4)^n
56n(4)n为受迫响应(特解)
方法2
1.由系统方程求得特征根
并由下表得到齐次解形式
-
根据激励序列形式得到特解形式:
-
代入二阶差分方程,计算可得受迫响应:
-
目前可得到全解为:
-
由起始条件 y ( − 1 ) = 5 , y ( − 2 ) = 0 y(-1)=5,y(-2)=0 y(−1)=5,y(−2)=0得到初始条件 y ( 0 ) , y ( 1 ) y(0),y(1) y(0),y(1)。并将初始条件代入全解,解得完全响应。
y = − 26 25 ( − 1 ) n + 426 25 ( 4 ) n + 6 5 n ( 4 ) n y=-\frac{26}{25}(-1)^n+\frac{426}{25}(4)^n+\frac{6}{5}n(4)^n y=−2526(−1)n+25426(4)n+56n(4)n
离散时间系统实现
线性时不变系统实现结构
在数字信号处理(DSP)中,直接一型(Direct Form I)和直接二型(Direct Form II)是实现无限脉冲响应(IIr)或有限脉冲响应(FIr)数字滤波器的两种常见结构。
一阶简单结构:

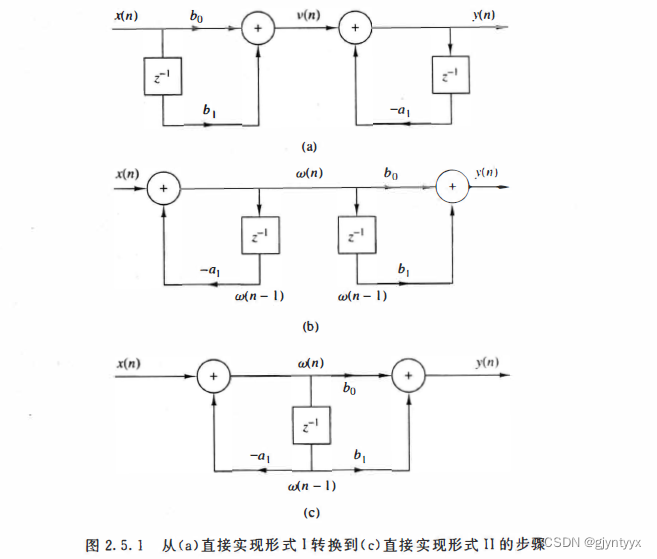
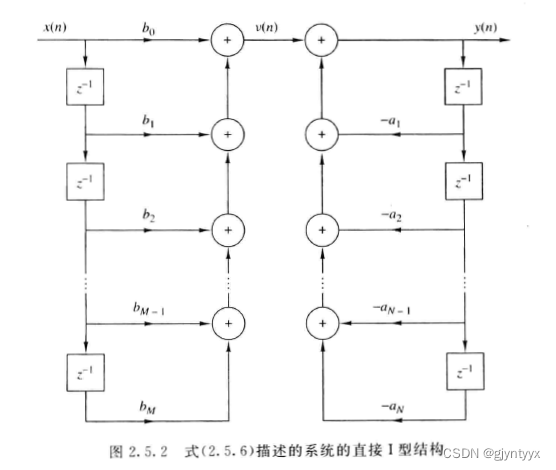
直接一型(Direct Form I)
直接一型通常具有两个部分:一个是用于处理输入信号的前向滤波器(通常用 b b b 系数表示),另一个是用于处理输出信号的反向滤波器(通常用 a a a 系数表示)。
对于一个线性时不变系统,其差分方程通常表示为:
y
[
n
]
=
∑
k
=
0
M
b
k
x
[
n
−
k
]
−
∑
k
=
1
N
a
k
y
[
n
−
k
]
y[n] = \sum_{k=0}^{M} b_k x[n-k] - \sum_{k=1}^{N} a_k y[n-k]
y[n]=k=0∑Mbkx[n−k]−k=1∑Naky[n−k]
直接二型(Direct Form II)
直接二型是直接一型的一种优化形式,它减少了需要的存储单元和加法器数量。在直接二型中,前向滤波器和反向滤波器被结合成一个共享相同的延迟线。
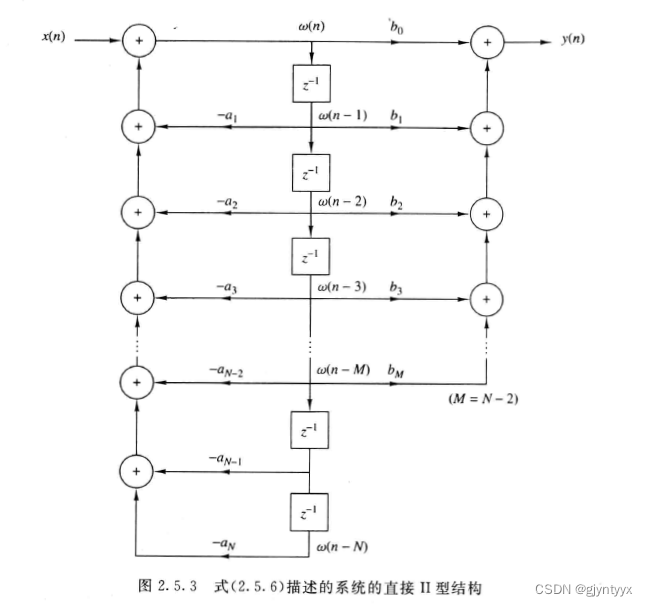
两种形式在数学上是等价的,但由于数值精度和实现细节的不同,它们在实际应用中可能会有不同的性能。
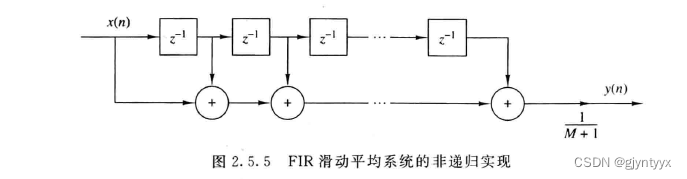
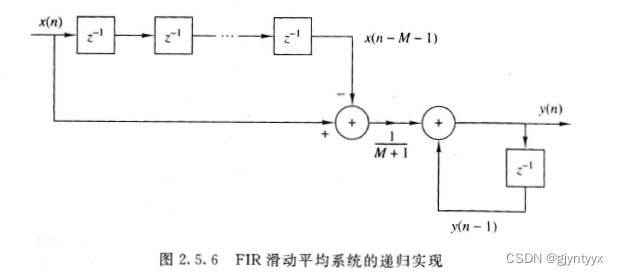
FIr系统的递归和非递归实现

离散时间信号相关
互相关序列
在数字信号处理中,互相关(Cross-correlation)用于度量两个信号序列的相似程度。对于两个离散时间序列 x [ n ] x[n] x[n] 和 y [ n ] y[n] y[n],它们的互相关 r x y [ l ] r_{xy}[l] rxy[l] 通常定义为:
r x y [ l ] = ∑ n = − ∞ ∞ x [ n ] ⋅ y [ n − l ] r_{xy}[l] = \sum_{n=-\infty}^{\infty} x[n] \cdot y[n-l] rxy[l]=n=−∞∑∞x[n]⋅y[n−l]
这里的 l l l 是滞后(lag)参数,表示 y [ n ] y[n] y[n] 相对于 x [ n ] x[n] x[n] 的时间滞后(或领先)量。
如果 x [ n ] x[n] x[n] 和 y [ n ] y[n] y[n] 是有限长度的序列,那么上述无限求和会变为有限求和。
或者根据具体的实现和需求来进行适当的修改。
通过计算互相关,我们可以找出两个序列中重复或相似的模式,即使它们是时间平移的。这在很多应用中都是非常有用的,比如图像处理、通信、语音识别等。
证明 r x y [ l ] = r y x [ − l ] r_{xy}[l] = r_{yx}[-l] rxy[l]=ryx[−l]
互相关 r x y [ l ] r_{xy}[l] rxy[l] 定义为:
r
x
y
[
l
]
=
∑
n
=
−
∞
∞
x
[
n
]
⋅
y
[
n
−
l
]
r_{xy}[l] = \sum_{n=-\infty}^{\infty} x[n] \cdot y[n-l]
rxy[l]=n=−∞∑∞x[n]⋅y[n−l]
互相关
r
y
x
[
−
l
]
r_{yx}[-l]
ryx[−l] 定义为:
r y x [ − l ] = ∑ n = − ∞ ∞ y [ n ] ⋅ x [ n + l ] r_{yx}[-l] = \sum_{n=-\infty}^{\infty} y[n] \cdot x[n+l] ryx[−l]=n=−∞∑∞y[n]⋅x[n+l]
观察两个式子,我们发现 r y x [ − l ] r_{yx}[-l] ryx[−l] 可以通过替换 n → n − l n \rightarrow n-l n→n−l 得到 r x y [ l ] r_{xy}[l] rxy[l],因此:
r
y
x
[
−
l
]
=
∑
n
=
−
∞
∞
y
[
n
]
⋅
x
[
n
+
l
]
r_{yx}[-l] = \sum_{n=-\infty}^{\infty} y[n] \cdot x[n+l]
ryx[−l]=n=−∞∑∞y[n]⋅x[n+l]
=
∑
m
=
−
∞
∞
y
[
m
+
l
]
⋅
x
[
m
]
(
这里我们进行了替换:
m
=
n
−
l
)
= \sum_{m=-\infty}^{\infty} y[m+l] \cdot x[m] \quad (\text{这里我们进行了替换:} m = n-l)
=m=−∞∑∞y[m+l]⋅x[m](这里我们进行了替换:m=n−l)
=
∑
m
=
−
∞
∞
x
[
m
]
⋅
y
[
m
+
l
]
(
由于乘法是可交换的
)
= \sum_{m=-\infty}^{\infty} x[m] \cdot y[m+l] \quad (\text{由于乘法是可交换的})
=m=−∞∑∞x[m]⋅y[m+l](由于乘法是可交换的)
=
r
x
y
[
l
]
= r_{xy}[l]
=rxy[l]
因此,
r
x
y
[
l
]
=
r
y
x
[
−
l
]
r_{xy}[l] = r_{yx}[-l]
rxy[l]=ryx[−l] 成立。
所以,
r
x
y
[
l
]
r_{xy}[l]
rxy[l]正是
r
y
x
[
l
]
r_{yx}[l]
ryx[l]的偶对称序列,它们关于 l = 0 对称。 因此,关于x(n) 和 y(n)的相似性,两者提供一样的信息。
卷积和互相关
在卷积计算中,其中一个序列被反转,再平移,然后乘以另一个序列得到乘积序列,最后,将乘积序列的所有值相加。 除了反转操作以外.计算互相关序列包含相同的操作:平移一个序列,将两个序列相乘,再将乘积 序列的所有值相加。所以,如果我们有一段执行卷积运算的程序,那么通过将序列x(n)和反转序列y(-n)作为程序的输入,就可以用它来执行互相关运算。

自相关序列
处理有限长序列
自相关和互相关通常表示为有限和的形式。特别地,如果 x [ n ] x[n] x[n] 和 y [ n ] y[n] y[n] 是长度为 N N N 的因果序列(即 n < 0 n < 0 n<0 和 n ≥ N n \geq N n≥N 时, x [ n ] = y [ n ] = 0 x[n] = y[n] = 0 x[n]=y[n]=0),那么互相关序列 r x y [ l ] r_{xy}[l] rxy[l] 和自相关序列 r x x [ l ] r_{xx}[l] rxx[l] 可以分别表示为:
互相关序列 r x y [ l ] r_{xy}[l] rxy[l]
r x y [ l ] = ∑ n = 0 N − 1 x [ n ] ⋅ y [ n − l ] for 0 ≤ l < N r_{xy}[l] = \sum_{n=0}^{N-1} x[n] \cdot y[n-l] \quad \text{for} \, 0 \leq l < N rxy[l]=n=0∑N−1x[n]⋅y[n−l]for0≤l<N
或者,考虑所有 l l l:
r x y [ l ] = ∑ n = max ( 0 , l ) min ( N − 1 , N + l − 1 ) x [ n ] ⋅ y [ n − l ] r_{xy}[l] = \sum_{n=\max(0, l)}^{\min(N-1, N+l-1)} x[n] \cdot y[n-l] rxy[l]=n=max(0,l)∑min(N−1,N+l−1)x[n]⋅y[n−l]
自相关序列 r x x [ l ] r_{xx}[l] rxx[l]
r x x [ l ] = ∑ n = 0 N − 1 − l x [ n ] ⋅ x [ n + l ] for 0 ≤ l < N r_{xx}[l] = \sum_{n=0}^{N-1-l} x[n] \cdot x[n+l] \quad \text{for} \, 0 \leq l < N rxx[l]=n=0∑N−1−lx[n]⋅x[n+l]for0≤l<N
或者,考虑所有 l l l:
r x x [ l ] = ∑ n = max ( 0 , l ) min ( N − 1 , N + l − 1 ) x [ n ] ⋅ x [ n − l ] r_{xx}[l] = \sum_{n=\max(0, l)}^{\min(N-1, N+l-1)} x[n] \cdot x[n-l] rxx[l]=n=max(0,l)∑min(N−1,N+l−1)x[n]⋅x[n−l]
这些公式都是针对离散时间因果序列的,并且长度 N N N 是有限的。
自相关和互相关序列的性质
自相关序列 r x x [ l ] r_{xx}[l] rxx[l]
- 对称性: r x x [ l ] = r x x [ − l ] r_{xx}[l] = r_{xx}[-l] rxx[l]=rxx[−l]
- 正定性: r x x [ 0 ] ≥ r x x [ l ] r_{xx}[0] \geq r_{xx}[l] rxx[0]≥rxx[l] ,对所有 l l l
- 因果性: r x x [ l ] = 0 r_{xx}[l] = 0 rxx[l]=0 ,对 l < 0 l < 0 l<0 (如果 x [ n ] x[n] x[n] 是因果信号)
互相关序列 r x y [ l ] r_{xy}[l] rxy[l]
- 时间反转性: r x y [ l ] = r y x [ − l ] r_{xy}[l] = r_{yx}[-l] rxy[l]=ryx[−l]
- 线性性: 如果 z [ n ] = a x [ n ] + b y [ n ] z[n] = ax[n] + by[n] z[n]=ax[n]+by[n],则 r z x [ l ] = a r x x [ l ] + b r x y [ l ] r_{zx}[l] = ar_{xx}[l] + br_{xy}[l] rzx[l]=arxx[l]+brxy[l]
- 最大值性质: ∣ r x y [ l ] ∣ ≤ r x x [ 0 ] × r y y [ 0 ] |r_{xy}[l]| \leq \sqrt{r_{xx}[0] \times r_{yy}[0]} ∣rxy[l]∣≤rxx[0]×ryy[0]
自相关和互相关的关系
- 自相关是特殊的互相关: 当 x [ n ] = y [ n ] x[n] = y[n] x[n]=y[n], r x y [ l ] = r x x [ l ] r_{xy}[l] = r_{xx}[l] rxy[l]=rxx[l]
- 交叉性质: r x y [ l ] = r y x [ − l ] r_{xy}[l] = r_{yx}[-l] rxy[l]=ryx[−l]
周期序列相关
周期序列的相关性质与非周期序列稍有不同。周期序列 x [ n ] x[n] x[n] 的周期为 N N N,即 x [ n ] = x [ n + N ] x[n] = x[n+N] x[n]=x[n+N]。对于周期序列,自相关和互相关序列也是周期的。
周期序列的自相关 r x x [ m ] r_{xx}[m] rxx[m]
对于周期序列 x [ n ] x[n] x[n],其自相关函数定义为:
r x x [ m ] = 1 N ∑ n = 0 N − 1 x [ n ] x ∗ [ n − m ] r_{xx}[m] = \frac{1}{N} \sum_{n=0}^{N-1} x[n] x^*[n-m] rxx[m]=N1n=0∑N−1x[n]x∗[n−m]
这里
x
∗
[
n
]
x^*[n]
x∗[n] 是
x
[
n
]
x[n]
x[n] 的共轭。
x[n]是周期为N的周期性相关序列,1/N可以视为归一化比例因子。
周期序列的互相关 r x y [ m ] r_{xy}[m] rxy[m]
对于两个周期序列 x [ n ] x[n] x[n] 和 y [ n ] y[n] y[n],其互相关函数定义为:
r x y [ m ] = 1 N ∑ n = 0 N − 1 x [ n ] y ∗ [ n − m ] r_{xy}[m] = \frac{1}{N} \sum_{n=0}^{N-1} x[n] y^*[n-m] rxy[m]=N1n=0∑N−1x[n]y∗[n−m]
性质
- 周期性: r x x [ m ] = r x x [ m + N ] r_{xx}[m] = r_{xx}[m+N] rxx[m]=rxx[m+N] 和 r x y [ m ] = r x y [ m + N ] r_{xy}[m] = r_{xy}[m+N] rxy[m]=rxy[m+N]
- 对称性: 对于实值序列, r x x [ m ] = r x x [ − m ] r_{xx}[m] = r_{xx}[-m] rxx[m]=rxx[−m]
- 互相关与自相关的关系: r x y [ m ] = r y x [ − m ] r_{xy}[m] = r_{yx}[-m] rxy[m]=ryx[−m]
实际应用中,相关被用于鉴别观测的物理信号的周期,这个物理信号可能已被随机噪声干扰污染过。 
在这种场景下,
y
[
n
]
y[n]
y[n] 是
x
[
n
]
x[n]
x[n] 和
w
[
n
]
w[n]
w[n] 的和,即
y
[
n
]
=
x
[
n
]
+
w
[
n
]
y[n] = x[n] + w[n]
y[n]=x[n]+w[n],而
x
[
n
]
x[n]
x[n] 是一个周期为
N
N
N 的周期性序列,
w
[
n
]
w[n]
w[n] 是加性白噪声。观测
y
[
n
]
y[n]
y[n] 的
M
M
M 个样本,其中
M
≫
N
M \gg N
M≫N。
为了方便,假设 y [ n ] = 0 y[n] = 0 y[n]=0 当 n < 0 n < 0 n<0 或 n ≥ M n \geq M n≥M。
在这种情况下, y [ n ] y[n] y[n] 的自相关序列 r y y [ m ] r_{yy}[m] ryy[m],使用归一化因子 1 M \frac{1}{M} M1,可以定义为:
r y y [ l ] = 1 M ∑ n = 0 M − 1 y [ n ] ⋅ y [ n − l ] r_{yy}[l] = \frac{1}{M} \sum_{n=0}^{M-1} y[n] \cdot y[n-l] ryy[l]=M1n=0∑M−1y[n]⋅y[n−l]
这种定义的一个优点是,它自然地考虑了 y [ n ] y[n] y[n] 在 n < 0 n < 0 n<0 和 n ≥ M n \geq M n≥M 的限制。
自相关序列 r y y [ m ] r_{yy}[m] ryy[m] 实际上是由 x [ n ] x[n] x[n] 和 w [ n ] w[n] w[n] 的自相关和互相关的组合构成的。
具体来说,
r y y [ m ] = r x x [ m ] + r x w [ m ] + r w x [ m ] + r w w [ m ] r_{yy}[m] = r_{xx}[m] + r_{xw}[m] + r_{wx}[m] + r_{ww}[m] ryy[m]=rxx[m]+rxw[m]+rwx[m]+rww[m]
其中,
- r x x [ m ] r_{xx}[m] rxx[m] 是 x [ n ] x[n] x[n] 的自相关序列。
- r w w [ m ] r_{ww}[m] rww[m] 是 w [ n ] w[n] w[n] 的自相关序列(通常是一个单位脉冲函数,因为 w [ n ] w[n] w[n] 是白噪声)。
- r x w [ m ] r_{xw}[m] rxw[m] 和 r w x [ m ] r_{wx}[m] rwx[m] 是 x [ n ] x[n] x[n] 和 w [ n ] w[n] w[n] 的互相关序列。
如果 x [ n ] x[n] x[n] 和 w [ n ] w[n] w[n] 是统计独立的,那么 r x w [ m ] r_{xw}[m] rxw[m] 和 r w x [ m ] r_{wx}[m] rwx[m] 通常为零。
当 x [ n ] x[n] x[n] 是周期性信号时,其自相关函数 r x x [ m ] r_{xx}[m] rxx[m] 也将是周期性的,并在 l = 0 , N , 2 N , … l=0, N, 2N, \ldots l=0,N,2N,… 处具有峰值。这些峰值可以作为周期 N N N 的明确指示。
当使用有限 M M M 个样本进行相关计算时,对于较大的延迟 l l l,尤其当 l > M / 2 l > M/2 l>M/2 时, r y y [ l ] r_{yy}[l] ryy[l] 的准确性会受到影响。这是因为有限的样本数导致 x [ n ] x [ n − l ] x[n]x[n-l] x[n]x[n−l] 的许多乘积项为零,从而减小了自相关函数在大延迟处的峰值。
这种效应尤其在信号处理和数据分析中需要注意,特别是当我们试图从有限的数据样本中识别周期性或其他结构时。
在您的描述中, r w w [ m ] r_{ww}[m] rww[m] 是随机序列 w ( n ) w(n) w(n) 的自相关序列。由于 w ( n ) w(n) w(n) 是随机的,其自相关函数 r w w [ m ] r_{ww}[m] rww[m] 在 m = 0 m = 0 m=0 处会有一个峰值。随后,由于随机性,该函数会快速衰减至零。这意味着 r w w [ m ] r_{ww}[m] rww[m] 只在 m m m 接近零时具有较大的值,而在 m m m 偏离零后,该值会迅速衰减。
在这种情境下,随机噪声 w ( n ) w(n) w(n) 的自相关序列 r w w [ m ] r_{ww}[m] rww[m] 会在 m = 0 m=0 m=0 附近有一个显著的峰值,而迅速衰减为接近零的值。这与周期信号 x ( n ) x(n) x(n) 的自相关函数形成鲜明对比,因为周期信号的自相关函数在 m m m 等于信号周期的整数倍时也会出现峰值。
这种对比性质能用来检测淹没在噪声 w ( n ) w(n) w(n) 中的周期信号 x ( n ) x(n) x(n)。通过观察 y ( n ) y(n) y(n)(即 x ( n ) + w ( n ) x(n) + w(n) x(n)+w(n))的自相关函数 r y y [ m ] r_{yy}[m] ryy[m],您可能能够在 m m m 达到 x ( n ) x(n) x(n) 的周期时观察到额外的峰值。这些峰值由于 x ( n ) x(n) x(n) 的周期性而产生,并能用于检测和确定 x ( n ) x(n) x(n) 的周期。
这是一种常用的方法,用于从噪声中提取出周期性信号,特别是在信噪比较低的情况下。这也是许多信号处理算法和应用(如雷达、无线通信等)中的一个关键步骤。
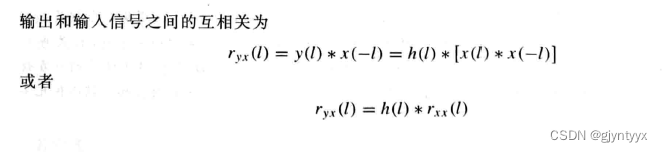
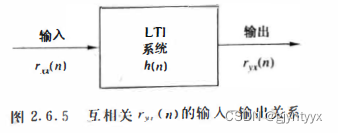
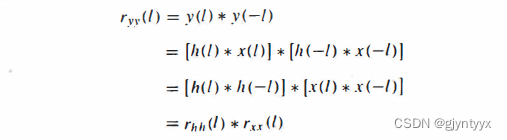
如果系统是稳定的,那么冲激响应h(n)的自相关,
r
h
h
(
l
)
r_{hh}(l)
rhh(l)就存在。此外,稳定性保证了系统不改变输入信号的类型(能量或者功率)。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









