







1.概述
无霍尔的BLDC控制方案与有霍尔BLDC的基本原理相似,都是用所谓“六步换向法”,根据转子当前的位置,按照一定的顺序给定子绕组通电使BLDC电机转动。所不同的是无霍尔BLDC不需要霍尔效应传感器,通过检测定子绕组的反电动势过零点来判断转子当前的位置。与有霍尔的方案相比,最明显的优点就是降低了成本、减小了体积。且电机引线从8根变为3根,使接线调试都大为简化。另外,霍尔传感器容易受温度和磁场等外界环境的影响,故障率较高。因此,无霍尔BLDC得到越来越多的应用,在很多场合正逐步取代有霍尔BLDC。 本文介绍三相BLDC电机的无霍尔控制理论。根据特定的应用场合,具体的实现方法会有所不同。
2 .BLDC电机结构及驱动方式简介
一个简单的BLDC的构造如图1所示。电机外层是定子,包含电机绕组。多数BLDC都有三个Y型连接的绕组,这些绕组中的每一个都是由许多线圈互连组成的。电机内部是转子,由围绕电机圆周的磁性相反的磁极组成。图1显示了仅带有两个磁极(南北磁极)的转子,在实际应用中,大多数电机的转子具有多对磁极。
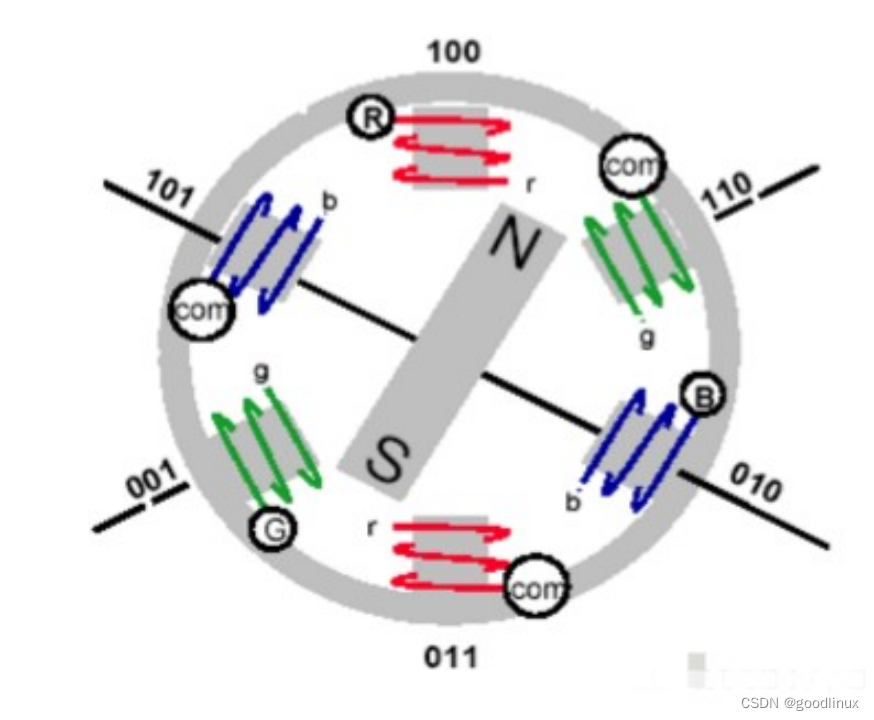
图1BLCD基本结构
BLDC电机驱动电路的基本模型如图2所示。通过开关管Q0~Q5来控制电机三相绕组的通电状态,开关管可以为IGBT或者功率MOS管。其中位于上方即与电源正端连接的开关管称为“上桥”,下方即与电源负端连接的开关管称为“下桥”。
图2BLCD电机驱动电路基本模型
例如,若Q1、Q4打开,其它开关管都关闭,则电流从电源正端经Q1、A相绕组、C相绕组、Q4流回电源负端。流过A、C相定子绕组的电流会产生一个磁场,由右手定则可知其方向与B相绕组平行。由于转子是永磁体,在磁场力的作用下会向著与定子磁场平行的方向旋转,即转到与B相绕组平行的位置,使转子的北磁极与定子磁场的南磁极对齐。 类似地,打开不同的上、下桥臂MOS管组合,就可控制电流的流向,产生不同方向的磁场,使永磁体转子转到指定的位置。要使BLDC电机按指定的方向连续转动,就必须按一定的顺序给定子绕组通电。从一种通电状态到另一种通电状态的切换称为“换相”,例如从AB通电变化到AC通电。换相使转子旋转到下一个位置。上下桥臂各3个开关管,共六种组合,因此每60°变化一次,经过六步换相就能使电机旋转一个电气周期。这就是所谓的“六步换相法”。 要使转子具有最大的转矩,理想的情况是使定子磁场与转子磁场方向垂直。但是实际上由于定子磁场方向每60°才变化一次,而转子在一直不停旋转,不可能时刻使它们保持90°的相位差。最优化的方法就是在每次换相时使定子磁场领先转子磁场方向120°电角度,这样在接下来转子旋转60°的过程中,定子磁场与转子磁场方向的夹角从120°变化到60°,转矩的利用率最高。 为了确定按照通电顺序哪一个绕组将得电,必须知道转子当前的位置。在有霍尔的BLDC中,转子的位置由定子中嵌入的霍尔效应传感器检测。无霍尔BLDC电机不借助位置传感器,而是利用电机本身的特征信号来取得与位置传感器类似的效果,其中应用最多的就是本文下一节要介绍的反电动势法。
3.反电动势法控制BLDC电机的原理
BLDC电机转动时,永磁体转子的旋转在电机内部产生变化的磁场,根据电磁感应定律,每相绕组都会感应出反电动势(BEMF,Back Electromotive Force)。BLDC电机的BEMF波形随转子的位置和速度变化,整体上呈现为梯形。 图3给出了电机旋转一个电周期中电流和反电动势的波形,其中的实线代表电流,虚线代表反电动势,横坐标为电机旋转的电气角度,根据BLDC的“六步换向”控制理论,我们知道在任意时刻三相BLDC只有两相通电,另一相开路,三相两两通电,共有六种组合,以一定的顺序每60°变化一次,这样产生旋转的磁场,拉动永磁体转子随之转动。这里的60°指的是电气角度,一个电周期可能并不对应于一个完整的转子机械转动周期。完成一圈机械转动要重复的电周期数取决于转子的磁极对数。每对转子磁极需要完成一个电周期,因此,电周期数/转数等于转子磁极对数。
图3BLCD电机电流和反电动势波形
控制BLDC的关键就是确定换相的时刻。从图3中可以看出,在每两个换相点的中间都对应一个反电动势的极性改变的点,即反电动势从正变化为负或者从负变化为正的点,称为过零点。利用反电动势的这个特性,只要我们能够准确检测出反电动势的过零点,将其延迟30°,即为需要换相的时刻。
4.反电动势的检测方法
从图3中可以看出,每次的反电动势过零点都发生在不通电的那一相。例如图3中
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











