






01算子优化的意义
随着大模型应用的普及以及算力紧缺,下一步对于计算性能的追求一定是技术的核心方向。因为目前大模型的计算逻辑是由一个个独立的算子或者说OP正反向求导实现的,底层往往调用的是GPU提供的CUDA的驱动程序。如果不能对于整个计算过程学习并了解,对于性能优化领域无非是隔靴搔痒,今天也是抽一点时间读了下网上的一些文档和CUDA的文档,整理了学习材料。
首先说下为什么要自定义算子,无非是两个原因,
(1)TF、PyTorch等提供的原生算子不满足需求,需要通过底层接口,比如CUDA层更灵活的实现个性化算子
(2)目前提供的算子性能不足,没有很好的利用到GPU的并行计算优势,有优化空间
接着性能优化的问题说,因为GPU与CPU最大的区别是计算单元占据了绝大部分的体积(图中绿色部分),而控制单元较少。

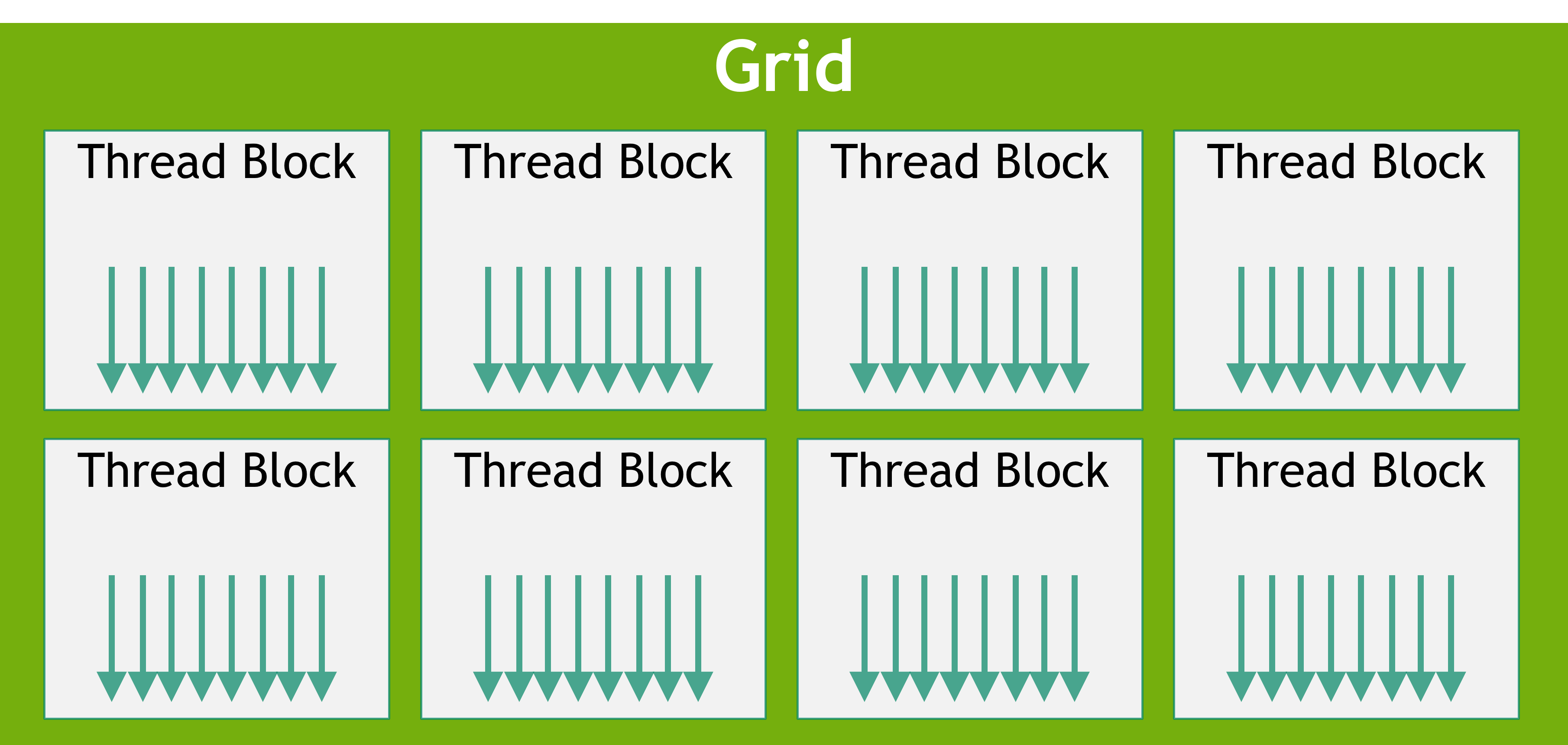
自定义手写算子可以更好地利用绿色的计算单元的并行化优势。大的思路是Grid包含Block,Block包含Thread。于是首先算子需要把计算逻辑拆分成Thread,让程序可以并行化的运行起来,然后有机的管理各个Block的执行节奏,解决好异步和同步问题,就可以让芯片的计算效率最大化。
02实现流程
整个自定义算子优化其实可以分为CUDA算子定义、算子编译、正方向梯度实现几个步骤。

1、CUDA算子定义
需要定义以下几个文件:
(1)function.cpp:python层和CUDA层的衔接,实现手写的C++ CUDA算子可以被python代码调用
(2)function.h:CUDA函数声明文件
(3)function.cu:CUDA函数的逻辑实现
这里比较核心的文件就是.cu文件,构建的时候主要做两个事:一个是建设Kernel函数,因为只有Kernel函数是在GPU端执行,执行完之后要将控制权给到控制函数,这里要控制好异步、同步的问题。二是在kernel函数中需要通过循环函数定义每个Thread以及每个Block的工作,真正让计算并行化
.cpp文件可以通过pybind函数实现,这个函数主要解决的是C++代码和Python绑定的问题,项目地址:GitHub - pybind/pybind11: Seamless operability between C++11 and Python
2.编译和执行
import torch from torch.utils.cpp_extension import load cuda_module = load(name="function", extra_include_paths=["include"], sources=["function.cpp", "function.cu"], verbose=True)
接着就是执行过程中的编译,通过load函数底层会执行JIT(Just in time)的动态编译模式调用.cpp和.cu文件,底层运行的是Ninjia编译器,通过调用nvcc编译.so文件
[1/2] nvcc -c function.cu -o function.cuda.o [2/3] c++ -c function.cpp -o function.o [3/3] c++ function.o function.cuda.o -shared -o function.so
3.正反向梯度实现
以上两步实现了自定义算子的逻辑,可以通过手写CUDA算子并在python框架层调用,如果要满足建模需求,还需要实现正方向梯度。具体的做法是在建模的函数中实现forward和backward函数,定义导数作为输出。
以上大概就是手写算子优化的简单流程,仅当学习笔记。
参考:















 560
560











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









