







02-02-类神经网络训练不起来怎么办?局部最小值local minima & 鞍点saddle point
总结
本节讨论:Optimization的时候,怎么把gradient descent做得更好?
当Gradient值为0时,使用 Hessian矩阵特征值正负,判断是saddle point还是local minima。
如果是local minima,现在已经达到了最优。
如果是saddle point,根据hessian判断参数的更新方向,继续更新。
如何判断Optimization是否失败?- 损失值较大&与其他模型相比效果不好
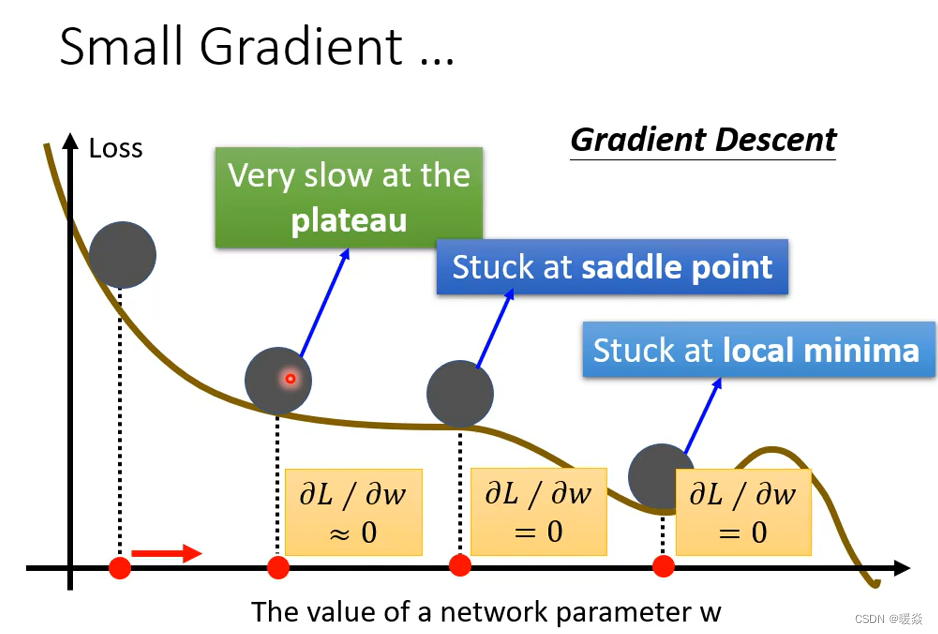
现在我们要讲的是Optimization的部分,等下我们要讲的东西基本上跟Overfitting没有什么太大的关联,我们只讨论Optimization的时候,怎么把gradient descent做得更好,那为什么Optimization会失败呢?
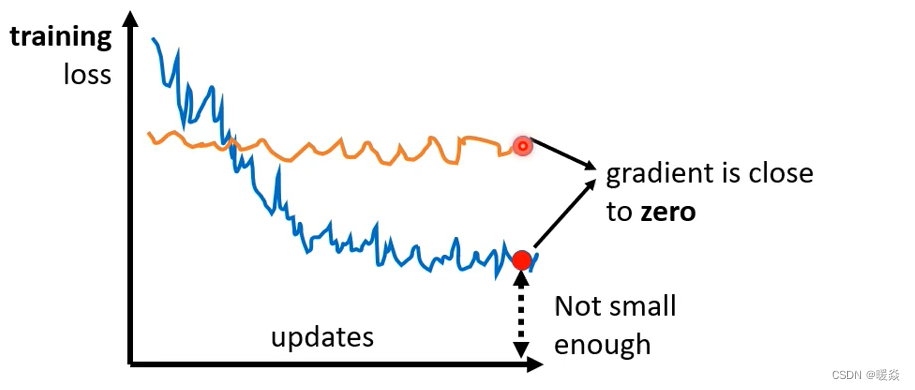
如上图蓝色线所示,你常常在做Optimization的时候会发现,随着你的参数不断的update,你的training的loss不会再下降,但是你对这个loss仍然不满意,你可以把deep的network跟linear的model或shallow network 比较,发现说它没有做得更好,所以你觉得deep network没有发挥它完整的力量,所以Optimization显然是有问题的。
如上图黄色线所示,有时候你会甚至发现,一开始你的model就train不起来,一开始你不管怎么update你的参数,你的loss通通都掉不下去。
为什么Optimization会失败?- Saddle Point & Local Minima
那这个时候到底发生了什么事情呢?
过去常见的一个猜想,是因为我们现在走到了一个地方,这个地方参数对loss的微分为零,当你的参数对loss微分为零的时候,gradient descent就没有办法再update参数了,这个时候training就停下来了,loss当然就不会再下降了。
讲到gradient为零的时候,大家通常脑海中最先浮现的,可能就是local minima,所以常有人说做deep learning,用gradient descent会卡在local minima,然后因为gradient descent不work,所以deep learning不work。但是如果有一天你要写deep learning相关paper的时候,你千万不要讲卡在local minima这种事情,别人会觉得你非常没有水平,为什么?
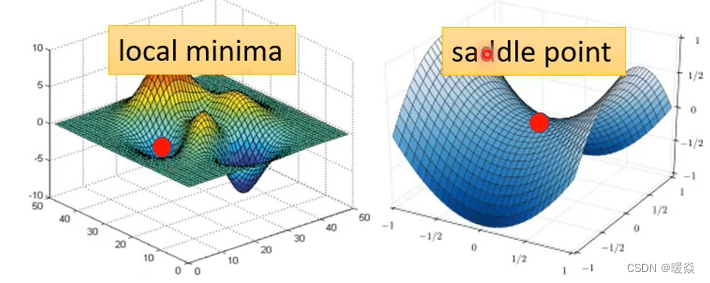
因为不是只有local minima的gradient是零,还有其他可能会让gradient是零,比如说 saddle point。所谓的saddle point就是gradient是零,但是不是local minima,也不是local maxima的地方,像上图右边这个例子里面红色的这个点,它在左右这个方向是比较高的,前后这个方向是比较低的,它像是一个马鞍的形状,所以叫做saddle point(鞍点)。像saddle point这种地方,它也是gradient为零,但它不是local minima,那像这种gradient为零的点,统称为critical point,所以你可以说你的loss,没有办法再下降,也许是因为卡在了critical point,但你不能说是卡在local minima,因为saddle point也是微分为零的点。但是今天如果你发现你的gradient,真的很靠近零,卡在了某个critical point,我们有没有办法知道,到底是local minima,还是saddle point?其实是有办法的。
为什么想要知道是卡在local minima还是saddle point?
因为如果是卡在local minima,那可能就没有路可以走了,因为四周都比较高,你现在所在的位置已经是最低的点,loss最低的点了,往四周走loss都会比较高,你不知道怎么走到其他的地方去。但saddle point就没有这个问题,如果你今天是卡在saddle point的话,saddle point旁边还是有路可以走的,还可以让你的loss更低的,你只要逃离saddle point,你就有可能让你的loss更低。
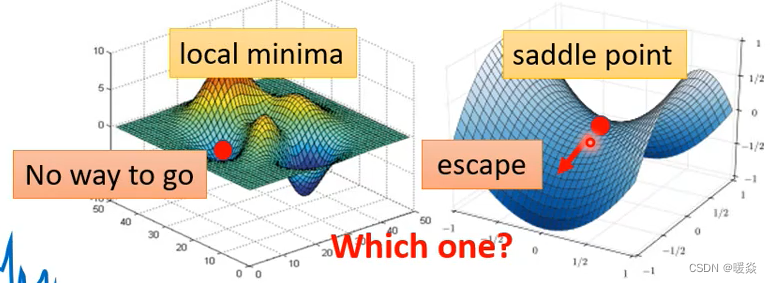
所以鉴别我们走到critical point的时候,到底是local minima还是saddle point,是一个值得去探讨的问题,那怎么知道一个critical point,到底是属于local minima还是saddle point呢?
如何判断 Local Minima or Saddle Point? - Hessian & 特征值正负
这边需要用到一点数学,以下这段其实没有很难的数学,就只是微积分跟线性代数,但如果你没有听懂的话,以下这段skip掉是没有关系的。
那怎么知道说一个点,到底是local minima还是saddle point呢?
你要知道我们loss function的形状,可是我们怎么知道loss function的形状呢,network本身很复杂,算出来的loss function显然也很复杂。
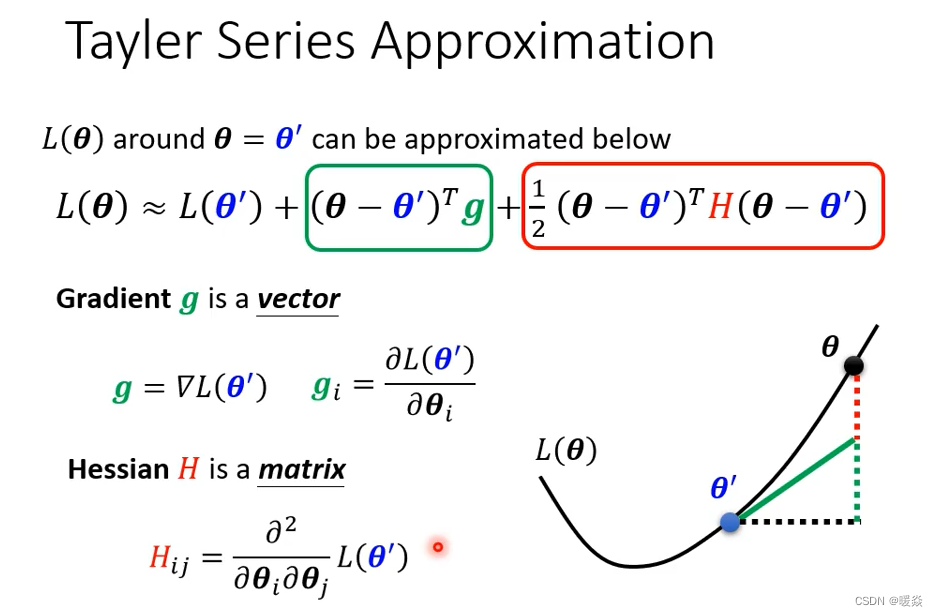
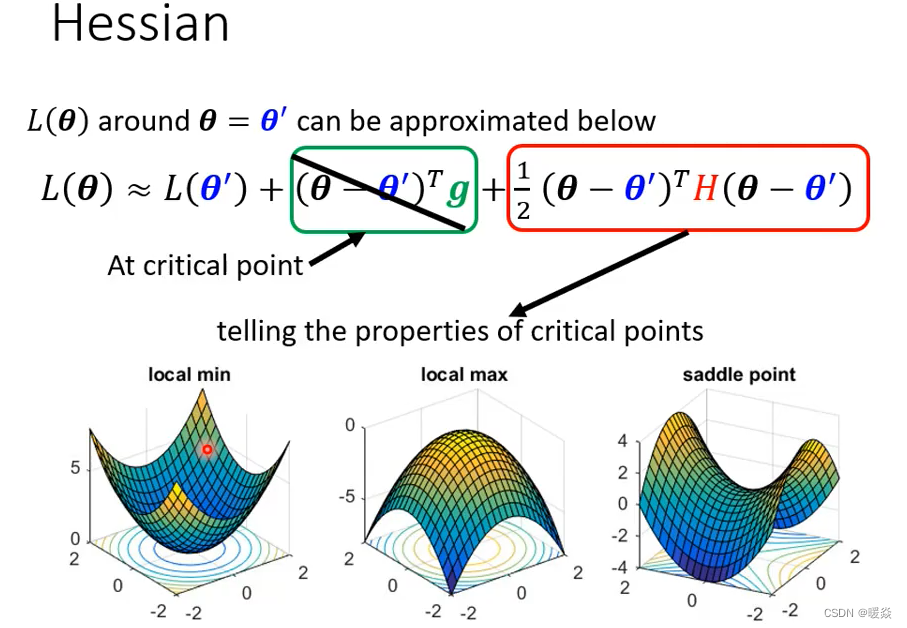
但是如果给定某一组参数,比如说蓝色的这个θ’,在θ’附近的loss function是有办法被写出来的,它写出来就是右侧这个样子。所以这个L(θ)完整的样子写不出来,但是它在θ’附近可以用这个式子来表示它,这个式子是Tayler Series Appoximation泰勒级数展开,这个假设你在微积分的时候已经学过了,所以我就不会细讲这一串是怎么来的,但我们就只讲一下它的概念,这一串里面包含什么东西呢?
- 第一项是L(θ’),就告诉我们说,当θ跟θ’很近的时候,L(θ)应该跟L(θ’)还蛮靠近的。
- 第二项(上图绿色框)是(θ-θ’)^T*g,其中g是一个矢量,这个g就是我们的gradient,我们用绿色的g来代表gradient,这个gradient会来弥补θ’跟θ之间的差距。虽然说θ’跟θ应该很接近,但是中间还是有一些差距的。那这个差距,用这个gradient来表示他们之间的差距,有时候gradient会写成∇L(θ’),这个地方的g是一个矢量,它的第i个component,就是θ的第i个component对L的微分,光是看g还是没有办法完整的描述L(θ),还要看第三项。
- 第三项(上图红色框)跟Hessian有关。这个H叫做Hessian矩阵,这个第三项是(θ-θ’)^TH(θ-θ’),所以第三项会再补足,再加上gradient以后与真正的L(θ)之间的差距。H里面放的是L的二次微分,它第i个row,第j个column的值,就是把θ的第i个component对L作微分,再把θ的第j个component,对L作微分,做两次微分以后的结果就是这个H_ij。
如果这边你觉得有点听不太懂的话,也没有关系。反正你就记得这个L(θ)的loss function,这个error surface在θ’附近可以写成这个样子,这个式子跟gradient和hessian两个东西有关系,gradient就是一次微分,hessian就是里面有二次微分的项目。
那如果我们走到了一个critical point,意味着gradient为零。
如上图,g是一个zero vector,绿色的这一项完全都不见了,只剩下红色的这一项。所以当在critical point的时候,这个loss function可以被近似为L(θ’)加上红色的这一项。可以根据红色的这一项来判断在θ’附近的error surface到底长什么样子,知道error surface长什么样子,就可以判断 θ’它是local minima、local maxima还是saddle point。
那我们就来看一下怎么根据Hessian,怎么根据红色的这一项,来判断θ’附近的地貌?。
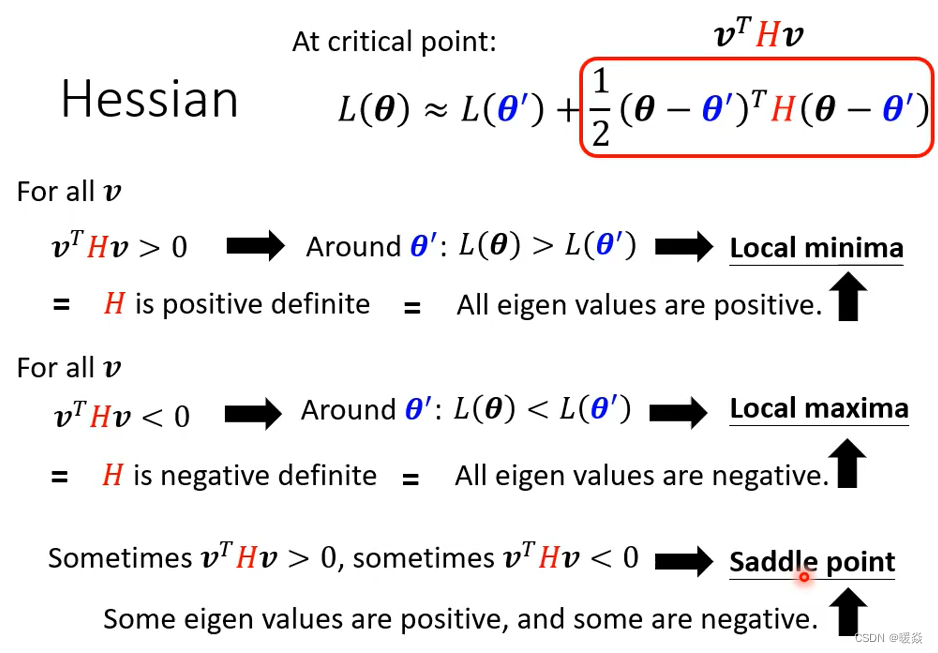
现在为了符号方便起见,把(θ-θ’)用v这个矢量来表示。分析H矩阵时,主要有如下三种情况:
-
①如果对任何可能的v,v^THv都大于零,也就是说现在θ不管代任何值,v可以是任何的v,红色框里面通通都大于零,那意味着说 L(θ)大于L(θ’)。L(θ)不管代多少,只要在θ’附近,L(θ)都大于L(θ’),代表L(θ’)是附近的一个最低点,所以它是local minima。
-
②如果今天反过来说,对所有的v而言,v^THv都小于零,θ不管代什么值,红色框框里面都小于零,意味着L(θ)小于L(θ’),代表L(θ’)是附近最高的一个点,所以它是local maxima。
-
③第三个可能是假设,v^THv有时候大于零、有时候小于零,你代不同的v进去,代不同的θ进去,红色这个框框里面有时候大于零,有时候小于零,意味着说在θ’附近有时候L(θ)大于L(θ’) 有时候L(θ)小于L(θ’),在L(θ’)附近有些地方高、有些地方低,这意味着这是一个saddle point。
但是你这边是说我们要代所有的v,看v^THv是大于零还是小于零。我们怎么有可能把所有的v,都拿来试试看呢,所以有一个更简便的方法,去确认说这一个条件会不会发生。
这个就直接告诉你结论,线性代数理论上是有教过这件事情的,如果今天对所有的v而言,v^THv都大于零,那这种矩阵叫做正定矩阵(positive definite ),它所有的eigen value特征值都是正的。所以如果你今天算出一个hessian,你不需要把它跟所有的v都乘起来,你只要去直接看这个H的eigen value,如果你发现:
-
①Hessian矩阵正定,所有eigen value都是正的,那就代表说这个条件成立,v^THv会大于零,代表说是一个local minima。所以你从hessian metric可以看出,它是不是local minima,你只要算出hessian metric以后,看它的eigen value发现都是正的,它就是local minima。
-
②Hessian矩阵负定,对所有的v而言v^THv小于零,那H是negative definite,代表所有eigen value都是负的,就保证他是local maxima。
-
③Hessian矩阵不定,那如果eigen value有正有负,那就代表是saddle point。
总之,那假设在这里你没有听得很懂的话,你就可以记得结论——你只要算出hessian矩阵,这个矩阵如果它所有的eigen value都是正的,那就代表我们现在在local minima,如果它有正有负,就代表在saddle point。
那如果刚才讲的,你觉得你没有听得很懂的话,我们这边举一个例子。
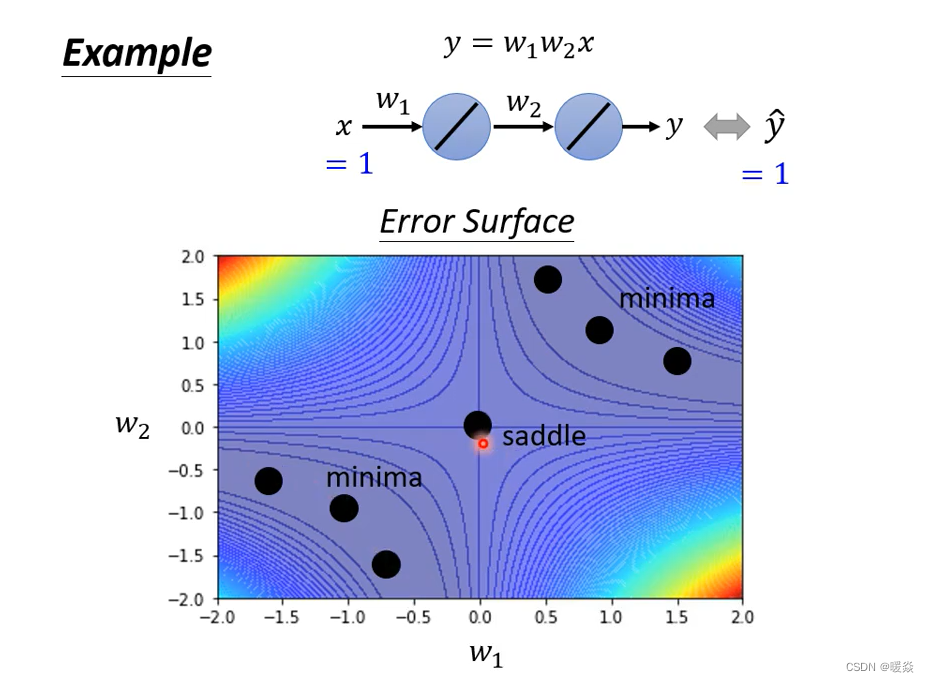
四个角落loss是高的,那这个图上你可以看出来说,有一些critical point,这个黑点的地方(0,0),原点的地方是critical point,然后事实上,右上三个黑点也是一排critical point,左下三个点也是一排critical point。
图里的线是等高线即每条线loss相等,可以把颜色当做loss的值,一个新的维度,想象一下 3D的图,冷色 loss 为谷,暖色 loss 为峰。
现在假设如果不暴力所有可能的loss,如果要直接算说一个点,是local minima,还是saddle point的话,怎么计算呢?
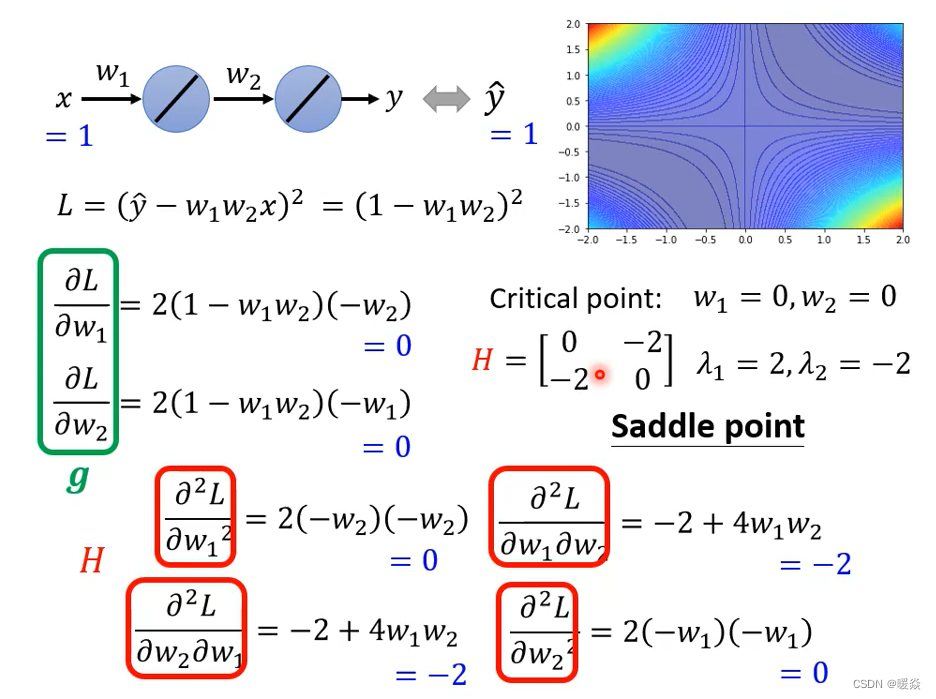
当然 我们刚才已经暴力所有可能的w₁ w₂了,所以你已经知道说,它显然是一个saddle point,但是现在假设还没有暴力所有可能的loss,所以我们要看看能不能够用H,用Hessian看出它是什么样的critical point,那怎么算出这个H呢
H它是一个矩阵,这个矩阵里面元素就是L的二次微分,所以这个矩阵里面第一个row,第一个coloumn的位置,就是w₁对L微分两次,第一个row 第二个coloumn的位置,就是先用w₂对L作微分,再用w₁对L作微分,然后这边就是w₁对L作微分,w₂对L作微分,然后w₂对L微分两次,这四个值组合起来,就是我们的hessian,那这个hessian的值是多少呢。
这个hessian告诉我们,它是local minima,还是saddle point呢,那你就要看这个矩阵的eigen value,算一下发现,这个矩阵有两个eigen value,2跟-2,eigen value有正有负,代表该点是 saddle point 。
从 Hessian 矩阵 看出参数更新方向 - 负特征值对应特征向量方向
以前,参数的更新方向看 Gradient,当卡在saddle point时,Gradient消失,可以继续从 Hessian 看出参数更新方向。
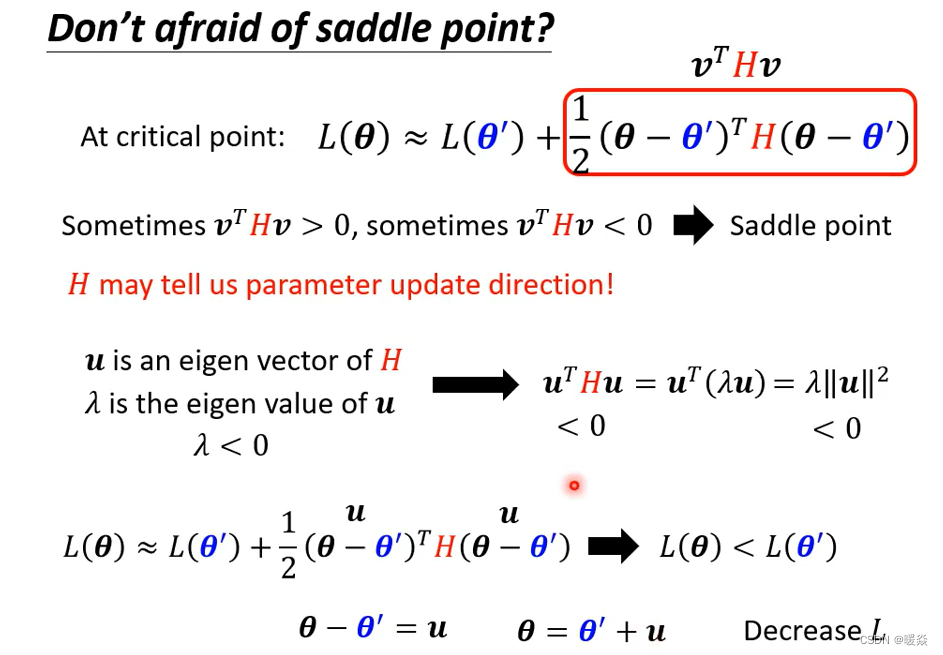
取负特征值对应的特征向量方向,作为参数更新方向。
例如,在上面的例子中,eigen vector 为-2时,特征向量为u,则参数的更新方向即为沿着u的方向。
为什么要取负特征值对应的特征向量方向为梯度更新方向?- L ( θ ) = L ( θ ′ ) + λ ∣ ∣ u ∣ ∣ 2 L(\theta)=L(\theta')+\lambda||u||^2 L(θ)=L(θ′)+λ∣∣u∣∣2
因为 u T H u = λ ∣ ∣ u ∣ ∣ 2 u^THu=\lambda||u||^2 uTHu=λ∣∣u∣∣2,因为 ∣ ∣ u ∣ ∣ 2 > 0 ||u||^2>0 ∣∣u∣∣2>0,当 λ < 0 \lambda<0 λ<0时, u T H u = λ ∣ ∣ u ∣ ∣ 2 < 0 u^THu=\lambda||u||^2<0 uTHu=λ∣∣u∣∣2<0,所以 L ( θ ) < L ( θ ′ ) L(\theta)<L(\theta') L(θ)<L(θ′),此时从 θ ′ \theta' θ′更新到 θ \theta θ梯度会下降,有 θ = θ ′ + u \theta=\theta'+u θ=θ′+u。
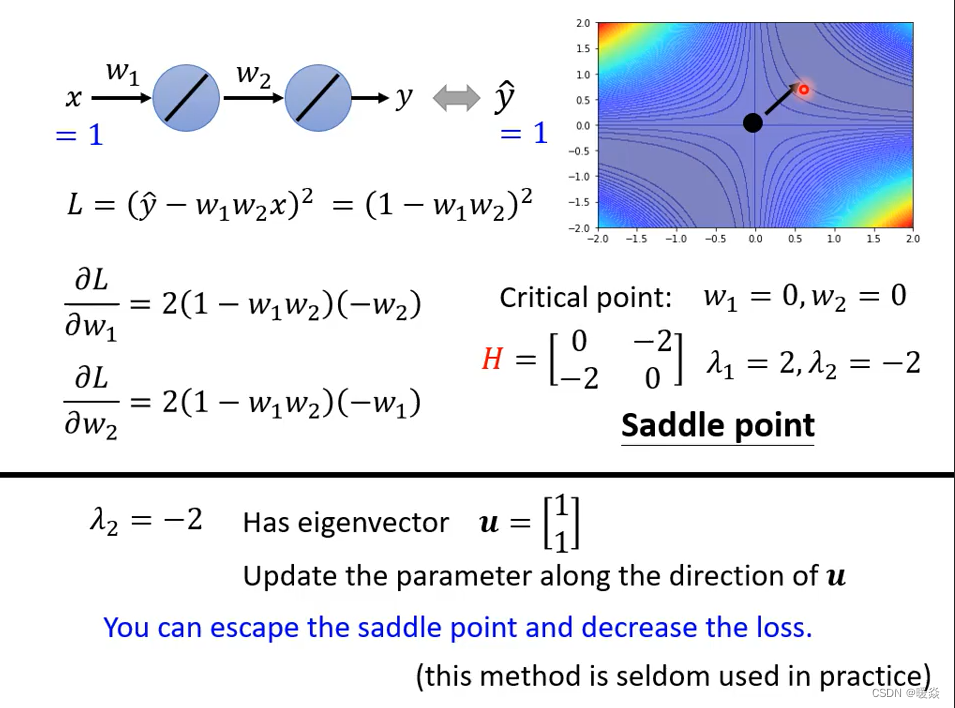
因为计算量很大,在实际使用中,很少有人用该方法逃离 saddle point,需要计算出二次微分,之后计算出 Hessian矩阵的特征值及其对应的特征向量。之后,还会介绍其他更简单的方法逃离 saddle point。
Saddle Point Vs Local Minima 哪个更常见?- Saddle Point
saddle point 和 local minima 哪个更常见?
低维空间的 local minima ,有可能在高维空间中是 saddle point,维度越高,可以走的路越多。实际使用中,参数都是成千上万,在很高的维度,所以 saddle point 更常见。
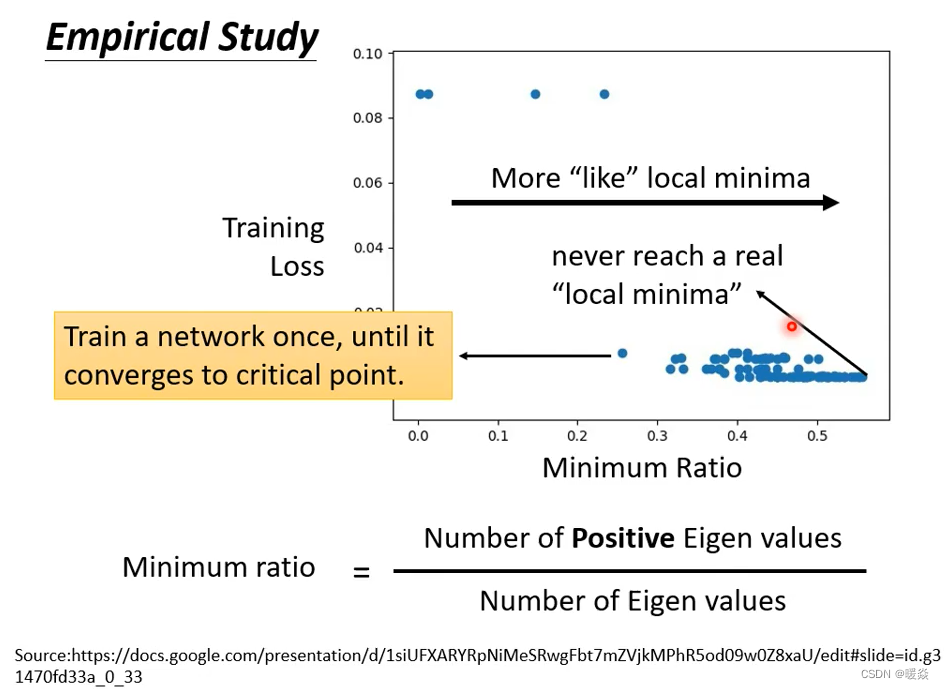
这是训练某一个network的结果,每一个点代表训练那个network训练完之后把它的Hessian拿出来进行计算。所以这边的每一个点都代表一个network。
我们训练某一个network,然后把它不断的进行训练,直到到gradient很小,卡在critical point。然后把那组参数出来分析,看看它是saddle point还是local minima。
纵轴代表training的时候的loss,就是卡住的那个loss。很多时候,你的loss在还很高的时候就训练不动了,就卡在critical point;那很多时候loss可以降得很低才卡在critical point,这是纵轴的部分。
横轴的部分是minimum ratio(最小比率)。minimum ratio是eigen value是正数的数目比eigen value的总数目,又如果所有的eigen value都是正的,代表我们今天的critical point是local minima;如果有正有负代表saddle point。那在实作上你会发现几乎找不到所有eigen value都是正的critical point。
所以虽然在这个图上,越往右代表我们的critical point越像local minima。但是它们都没有真的变成local minima。就算是在最极端的状况(最右边的点),我们仍然有一半的case中eigen value是负的。这一半case的eigen value是正的,就代表在所有的维度裡面有一半的路,这一半的路如果要让loss上升,还有一半的路可以让loss下降。
所以从经验上看起来其实local minima并没有那么常见。多数的时候你觉得你train到一个地方,你gradient真的很小,然后所以你的参数不再update了,往是因为你卡在了一个saddle point。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









