







什么是步进电机
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电机又称脉冲电动机。
步进电机是一种将电能转换成机械能的装置。控制信号是电脉冲,被控制量是转速。
步进电机的分类
按相数分
单相、二相、三相、四相、五相步进电机
什么是相数?
相数指的是电机内部的线圈组数。由于电动机的工作原理是通电导线在磁场中的受力,如果导线要流过电流,那么导线必须是可以闭合的,又因为导线在电机内部是以线圈组的形式存在,所以我们把一个闭合线圈组称为一相。
五线四相

从图中可以看出有五个接线端子,其中1和5、2和5、3和5、4和5总共构成了4个回路,也就是说有四个闭合线圈,所以称为五线四相。图中箭头表示电流方向,1234根线的电流汇聚到公共端,线圈中的电流方向是固定的,也就是单极性,所以也被称为单极性步进电机。
四线二相

从图中可以看出有四个接线端子,1和2、3和4构成了2条回路,有两个闭合线圈,所以称为四线二相。又由于这两个线圈没有公共端,所以线圈中的电流既可以是反向的也可以是正向的,也就是说两个线圈中的电流是双极性的,所以也被称为双极性步进电机。
图中右边是四线二相步进电机的拆机图,但是从图中可以看出有很多个线圈,并不是两个线圈。其实图中就2个闭合线圈,在实物中相隔的两个项圈是用导线连接在一起的。所以说总共看起来有八个线圈,其实就只有两相,只构成了两个回路。
按励磁方式分
磁阻式(反应式)、永磁式和混磁式
永磁式(PM电机)
转子是永磁性材料,通过改变定子线圈的磁极来驱动转子。一般都是内转子型的电动机它的圆柱形转子外表均匀的分布着N极和S极,永磁式步进电机一般为两相,扭矩和体积都比较小。步进角一般为3.75°、7.5°、15°和18°这四种。
永磁式步进电机的特点是步距角相对较大、转矩较小、精度比较低,但因为发热小、体积小、成本低被广泛应用。
磁阻式(反应式步进电机)

转子是 软磁材料,一般是硅钢片(本身不带磁性不过极易被磁化),工作时在定子线圈上产生脉冲磁场驱动转子转动。结构简单、成本低、精度较高,步距角可以达到1.2°,不过它的效率非常低,发热量很大、可靠性难以保障,被市场淘汰了
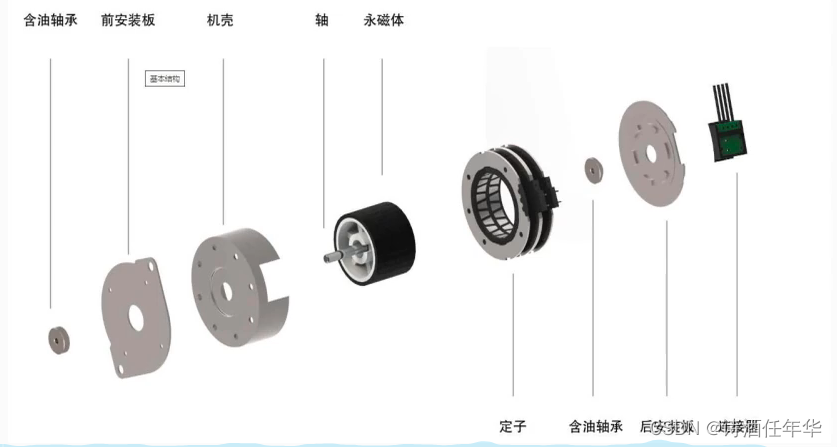
混合式

混合式步进电机综合了永磁式步进电机和磁阻式步进电机的优点,图中左边是刨视图,右边是它的结构图。
转子是三明治结构,由两个转子铁芯和磁钢叠加而成,转子铁芯一般为硅钢片,磁钢是永磁体,它们通过中心轴被轴向串联在一起,这使得转子铁芯也具有了磁性,也就是说如果左边的转子铁芯是N极的话,右边的转子铁芯是S极,这样做的优点是,在相同的定子电流下,混合式步进电机要比永磁式步进电机产生的转矩更大,而且混合式步进电机的步距角也会较小,二相步进电机的步距角一般为1.8°,三相一般为1。2°,五相一般为0.72°
混合式步进电机拥有输出转矩大、转速相对较高、点击发热量相对较小、噪音较低、效率高等特点,而且震动噪音小、运行平稳、响应速度快,适合频繁启停的场合。
工作原理
根据步进电机绕组极性的不同,他们的工作方式也略有差异。
单极性步进电机

单极性步进电机有共阴极和共阳极两种不同的接法,不过这两种接法并没有根本上的区别,主要是搭配自己的步进电机驱动器选择不同的接法,需要注意的是同样的程序在共阴极和共阳极两种接法的运动方向相反,如果不注意有可能造成财产上的损失。
驱动方式
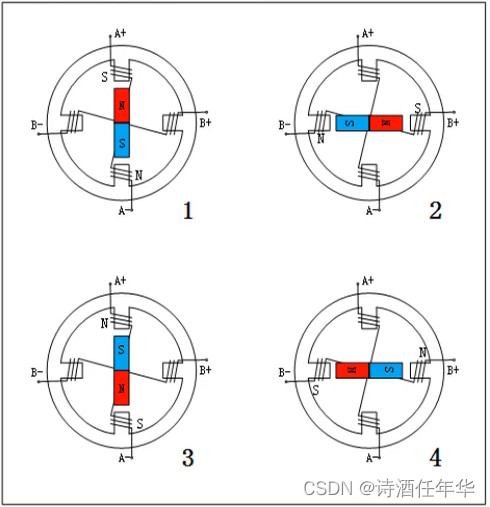
单相整步驱动(四相四拍)

上图是单相整步驱动的简略流程图,便于理解,采用共阴极的接法。
所谓单相整步驱动,就是在同一时刻只有一相被接通,一次转过的角度就是相邻两个定子磁极所在的角度,例如定子A->B,图中是90度。配合图上来说就是A、B、C、D只有一端被接通,转子转过的角度是90度。
从图一可以看出ABCD的负端连接在公共端负极,A端输入的电流往👉,根据右手螺旋定则A端绕组上面为N极,下面为S极。又因为单极性步进电机线圈中的电流是不能改变方向的,所以在每一相通电以后靠近中心的一侧都是S极。从图一到图二中断开的A相连接了B相,B相产生磁力以后将转子吸引转过90度。同理在图二到图三的过程中,我们断开了B相连接了C相,同样C相产生了磁场,带动转子转过90度。从图三到图四的过程中断开C相连接D相,带动转子转过90度。以上就是转子转过一个周期的四种工作状态,这种方式又被称为四相四拍的驱动方式。
两相整步驱动(四相四拍)

上图是两相整步驱动的简略流程图,便于理解,采用共阴极的接法
两相整步驱动指的是同一时刻只有两相被接通电流,每次转过的角度都是90度。从图中可以看出两相接通以后转子的位置恰好在两个定子之间。图一接通A、B相,从图一到图二断开A相连接C相,其他同理。同样的转子转过一个周期有四种工作状态,这种方式也被称为四相四拍的驱动方式。
从受力分析可以知道,由于平行四边形法则转子受两个磁极力的矢量和恰好处于两个定子之间

单相和双相整步驱动的区别是受力大小不同,假如说单相整步驱动中转子受单向定子磁力为1N,那在双相整步驱动中转子矢量和受力为N(双相定子磁力与单相定子磁力相等)。所以可以知道双相整步驱动受力更大些。
半步驱动(四相八拍)

上图是半步驱动的简略流程图,便于理解,采用共阴极的接法
从图中我们可以看到转子转过的角度为45度,而转过一周需要八个工作状态,所以这也被称为四相八拍驱动方式。不过半相驱动方式有一个副作用,就是图1357的扭矩要小于图2468的扭矩,这就造成了电机在工作时它的扭矩输出是忽大忽小的。
在不同的工作场景下,这三种驱动方式没什么优劣可分,都有他们自己的优势。
双极性步进电机
双极性步进电机没有公共端,线圈中的电流是可以改变的,所以需要一次控制两个端口。
单相整步驱动
上图是单相整步驱动的简略流程图,便于理解,没有公共端。
图一中A+连接正极,A-连接负极,由右手螺旋法则可以知道A+定子靠近中心一端是S极,A-定子靠近中心一端是N极。从图一到图二可知,A断电,B+连接正极,B-连接负极,由右手螺旋法则可以知道B+定子靠近中心一端是S极,B-定子靠近中心一端是N极,转子转过90度。从图二到图三可知,B断电,A-连接正极,A+连接负极,由右手螺旋法则可以知道A-定子靠近中心一端是S极,A+定子靠近中心一端是N极,转子转过90度。从图三到图四同理。
两相整步驱动

c
双极性步进电机的两相整步驱动与单极性步进电机的两相整步驱动类似,图一中A+与B+都接正极,A-与B-都接负极,由右手螺旋法则可以知道A+,B+靠近中心一侧都是S极,B-与A-靠近中心一侧都是N极,转子所受矢量和是在A+与B+两个定子之间。从图一到图二可知,B+与A-靠近中心一侧是S极,B-与A+靠近中心一侧是N极,受力矢量和是在B+与A-之间。其他图同理分析。
半步驱动

上图是半步驱动的简略流程图,便于理解,没有公共端。
其实就是单相整步驱动与双相整步驱动结合在一起。1357就是单相整步驱动,2468就是双相整步驱动,分析都是一样的,这里不再简述。
细分驱动
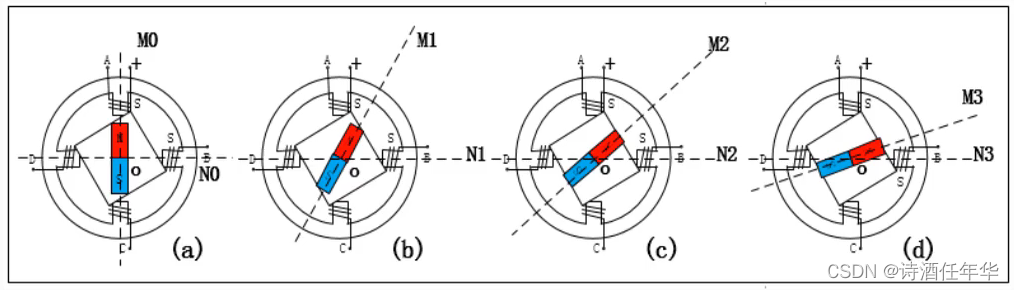
实现控制转子转动的角度。有几种方法,其中一种是增加相数,但是随之带来的是电机加工的难度而且步进电机控制的复杂程度也会成倍的增加,并且步进电机的体积也会限制相数的增加,所以这种不可靠。
另一种方法是改变定子线圈中的电流大小,也就是改变磁场产生的磁力大小,所以改变两相的电流就能改变转子在两个磁极中间的位置。在图a中我们导通上端电流,转子受力垂直向上,在图b中,我们导通上端线圈电流并稍微导通右端线圈电流可以发现转子受力向上并往右偏一点,在图c中,上端线圈和右端线圈导通电流一样大,转子受力在两个磁极之间,图d中增大右端线圈的电流或减小上端线圈电流转子受力右端多一点。
不过有个明显的问题是电机转动的扭矩不同,这个问题也很好解决,比如图a中的受力为1N,那么图b中的受力适量和保证在1N就可以了,我们可以适当的减小上端线圈的电流,适当增大右端线圈的电流达到这一目的。
在理论中如果我们可以控制电流精细到无穷小,那么每次转子转过的角度也可以无穷小,不过这只是在理想模型的分析,在实际中远没有我们分析的这么简单。
步进电机的参数
静态参数(电机不运动时的特性)
- 相数:步进电机中线圈的组数(相数越低的步进电机,它的步距角也就越少,其中两相步进电机的步距角为1.8°,三相步进电机的步距角为1.2°,五相步进电机的步距角为0.72°)
- 拍数:完成一个磁场周期性变化所需脉冲数或导电状态(例如在四相电机中,整步(Full step)驱动就是四相四拍的驱动方式,半步驱动就是四相八拍的驱动的驱动方式)
- 步距角:一个脉冲信号所对应的电机转动的角度
- 定位转矩:电机在不通电状态下,电机转子自身的锁定力矩
- 静转矩:电机在额定静态电压作用下,电机不作旋转运动时,电机转轴的锁定力矩
动态参数(电机运动时的特性)
- 步距角精度:步进电机转动一个步距角的理论值与实际值的误差。常用百分比表示。计算公式为实际值与理论值的差值除以理论值。
- 失步(丢步):电机运转时移动的步数,不等于接收到的脉冲数。一般是因为负载过大或频率过快导致转子走过的步数大于或小于电机所接收到的脉冲数。
- 失调角:转子齿轴线偏移定子齿轴线的角度。(由于加工误差的存在,电机运转必然会存在失调角,由于失调角产生的误差是没办法解决的,只能通过提高加工精度来尽量减小。)
- 最大空载启动频率:在不加负载的情况下,能够直接起动的最大频率。(如果在启动时超过这个频率,步进电机就会失步或者堵转,无法启动)
- 最大空载运行频率:电机不带负载的最高转速频率。
- 运行转矩特征:电机运行时扭矩的动态变化。(电机的动态力矩取决于电机运行时的平均电流,平均电流越大,电机输出的力矩也就越大。不过电流越大,电机的发热量就越大,所以需要综合考量电机的输出力矩和电机电流之间的关系)在电机手册中一般都会给出转矩特性曲线,这是选择步进电机最关键的参数之一。
- 电机正反转控制:通过改变通电顺序而改变电机的正反转。
步进电机的特点
- 精度高,误差不会积累
步进电机的精度大概为步距角的3%到5%,步进电机的定位是依靠转子和定子上的齿进行定位的,当磁通量最大时两个齿的位置完全对位,由于定子上的齿是固定的,转子在转过一周时每一个状态都有一个确定的位置,也就是说一个脉冲对一个确定的状态,但由于加工误差等其他因素的存在会导致转子与定子的齿没有完全对位而造成误差。当然这种误差不包括过载失步的情况,过载失步是一个特殊的状态,它属于步进电机的另一种属性。
- 工作温度高
步进电机的发热主要是铜损和铁损,铜损就是因为铜导线有电阻而使铜导线接通电流会发热。铁损是指作为铁芯的硅钢片在线圈中产生了涡流效应而被加热。
一般步进电机会因为温度过高而产生磁性减少,从而会导致力矩减少 ,但是一般铁损没办法减小,所以减少发热量一般是通过减少铜损来实现的。减少铜损一般有两种方法,一种是增加铜线的直径,另一种是减小电流。一般来说磁性材料的退磁点都在130℃以上,比较高的能达到200℃以上,所以在使用过程中步进电机外表的温度达到80℃是属于正常的。
- 转矩与速度(转速)成反比
速度越快步进电机的力矩越小。恒定功率输入时步进电机转动,电机各相绕组的电感将形成一个反向电动势,脉冲频率越高反向电动势越大,在反向电动势的作用下,电机的相电流随脉冲频率或速度的增大而减小,从而导致力矩的下降
- 最大启动频率
在较低脉冲频率时,步进电机可以正常启动。在较高脉冲频率时步进电机不会启动并且伴随啸叫声。步进电机的空载启动频率是固定的,只要我们在启动电机时脉冲频率低于它的最大启动频率就可以正常启动。但这只是针对步进电机没有负载的情况,如果电机带有负载,那么步进电机的启动频率会因为负载的大小而改变,它的带载启动频率是要低于空载启动频率的。如果带载情况下高于最大启动频率,步进电机会产生丢步或堵转,无法启动。
步进电机驱动器的应用
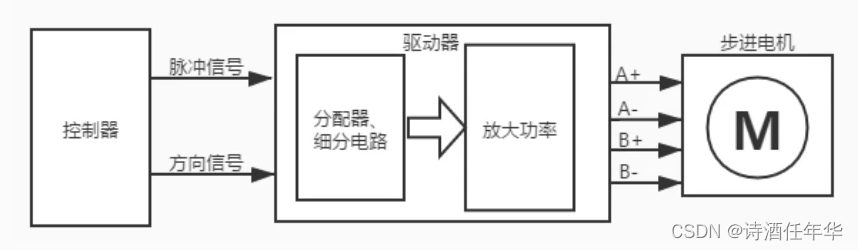
步进电机必须需要控制器和驱动器才能正常工作
控制器一般使用STM32或其他型号的MCU
驱动器起到将信号放大或转换的作用















 963
963











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









