







好久没动过智能小车了,这次从头到尾的做了一遍。实现比较简单的功能:循迹+蓝牙控制。下面讲述一下流程:
整个小车有代码+硬件,代码地址:https://github.com/cstlrx/BlueTooth-and-detector-Car
在做小车之前,首先应该明确需要的器件,其次划分功能模块,一个模块一个模块的来,在完成一个模块之后添加另一个能保证最终小车的稳定功能实现。有两种思路:一,以实现功能为主,不考虑后期要加什么东西,实现以后再做优化。二,先将项目整体需要做的东西全部过一遍,再一步步做出成品。我是第一种,在搭建的过程中也遇到了一些问题,如:我把电机弄好以后,咦,驱动放哪?我把驱动固定在板上以后,呀,洞洞板这面有可能使驱动引脚导电,等各种问题。所以具体采用哪种思路还需要根据实际情况来看。
器件清单
| 器件 | 数量 |
|---|---|
| 正点原子STM32 | 1 |
| 红外传感器 | 2 |
| 蓝牙 | 1 |
| L298N驱动 | 1 |
| 电机 | 2 |
| 车轮 | 2 |
| 万向轮 | 1 |
| 电池 | 1 |
| 洞洞板 | 两块 |
| 铜柱 | 若干 |
| 杜邦线 | 若干 |
功能模块
从一个流水灯开始,依次加入电机、PWM、红外、蓝牙,完成最终调试。
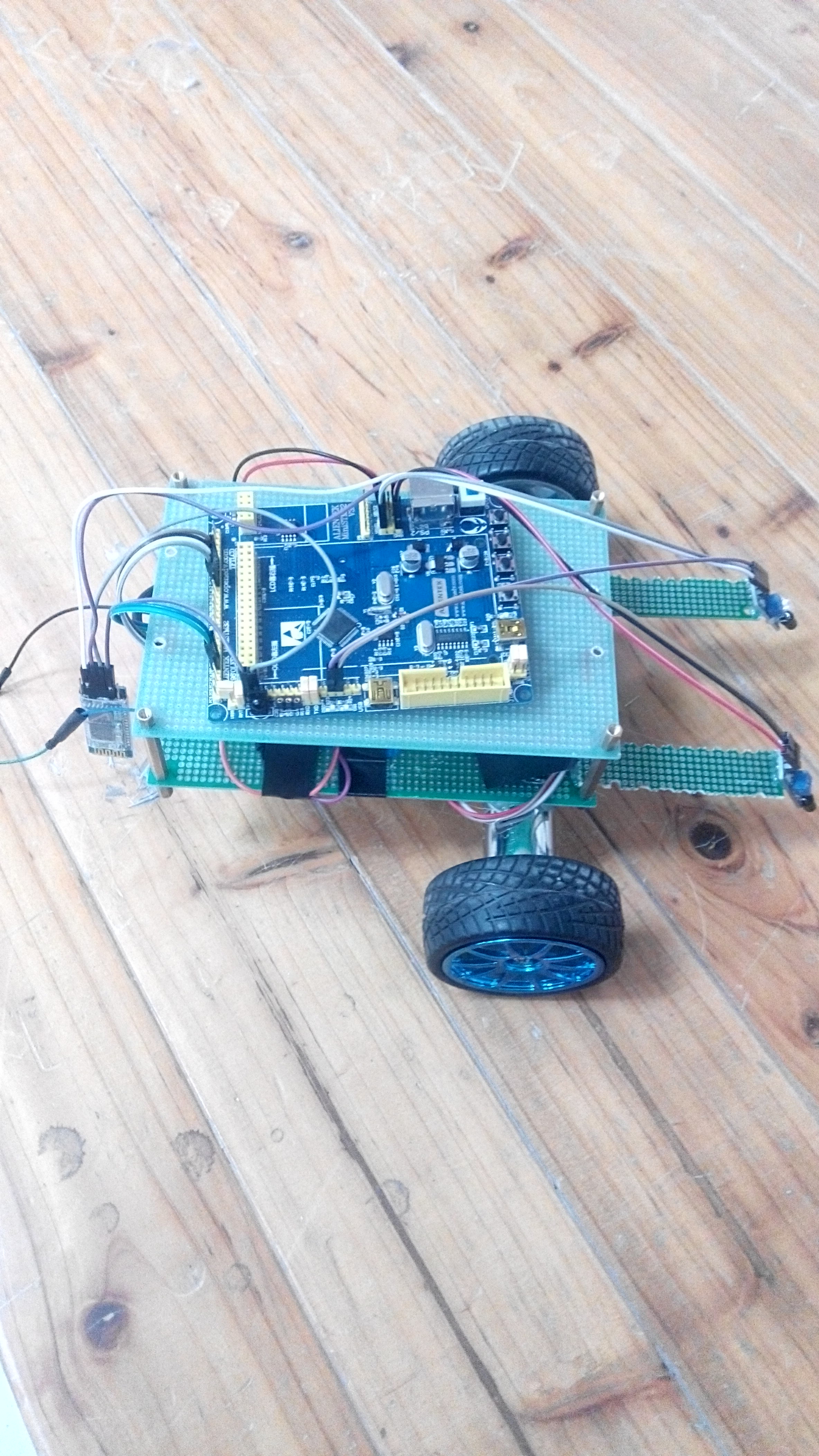
实物图
代码需要注意的问题:电机与驱动的接线及代码中GPIO口的初始化要能对应上,具体怎么接具体测试。















 6549
6549











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









