







 本文详细介绍了如何通过三点计算新坐标系的原点和轴向量,规范化得到正交单位向量,进而构造旋转矩阵和平移量,实现三维坐标系间的转换。关键步骤包括单位矢量的求取和转换参数的理解。
本文详细介绍了如何通过三点计算新坐标系的原点和轴向量,规范化得到正交单位向量,进而构造旋转矩阵和平移量,实现三维坐标系间的转换。关键步骤包括单位矢量的求取和转换参数的理解。
1、首先需要使用三点计算新坐标系需要的原点,三坐标轴向量。注意第一轴向的方向。
2、注意,得到新坐标系的这些参数,都是原坐标系下的。
3、新坐标系的三个轴的向量,计算得到单位向量。这样就可以得到三个正交的单位向量。
4、这三个单位向量组成的矩阵,就是新老坐标系相互转换的旋转矩阵。再加上新坐标系的原点就是平移量。即可得到两坐标系的转换参数。
5、转换参数的方向,需要注意是谁到谁的。记住一个原则,坐标系转换的参数与坐标系下点的转换参数是相反的。
以下内容为网上摘取,比较通俗的说明转换的参数。可以更好的了解转换过程。
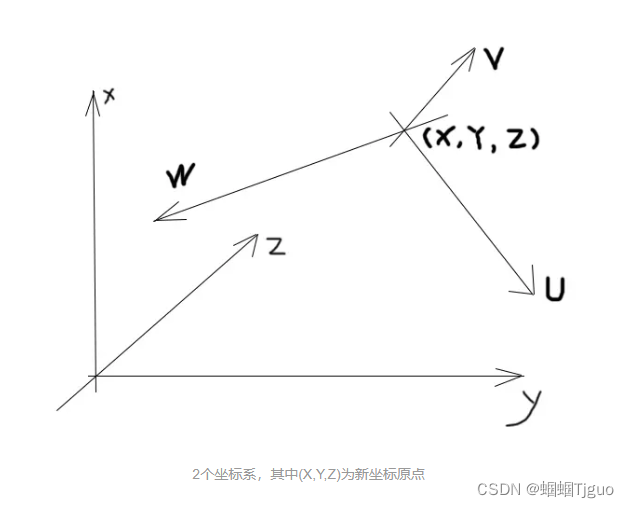
这时候我们便可以将(x,y,z)这个坐标系的三个方向矢量分别规格化,对此我们就可以得到用原坐标系定义的3个正交单位矢量。
u=(ux,uy,uz)
v=(vx,vy,vz)
w=(wx,wy,wz)
对此我们可以将新坐标原点位置(x,y,z)加以利用,便可以得到变换矩阵:
T3(表示平移)X R3(表示旋转)
|1 0 0 0 | |ux vx wx 0 |
= |0 1 0 0 | |uy vy wy 0 |
|0 0 1 0 | |uz vz wz 0 |
|-x -y -z 1 | |0 0 0 1 |
搞定,这样就能够十分简单的进行三维中坐标系之间的变换了!
作者:KarlvonDonitz https://www.bilibili.com/read/cv201994/

















 5727
5727

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









