









问题描述
最近搭建了一架无人机如下

飞行demo
self design Quadrotor flighting test2
但是在手飞过程,发现陀机很烫。应该是由于pid没调,然后机臂抖动导致的发热。接下来,用本博文记录一下调参的过程~~~
首先下载一下飞行日志

然后通过网站Flight Review打开
以下几个是比较重要的
roll角度

roll角速度
 pitch角度
pitch角度

pitch角速度

yaw角度

yaw角速度
 IMU测量(加速度计)
IMU测量(加速度计)

至于修改PID参数则是在:
然后先修改PID参数,再修改P

PX4位置环PID控制
输入的是期望的位置,然后外环是P控制。而内环是速度环,速度环用PID控制。而机器人实际的位置与速度也是需要测准的,以此来保证控制的质量
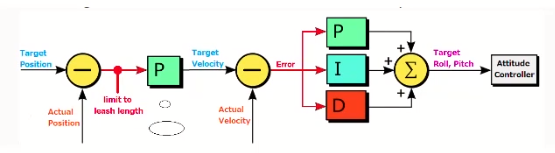
所以针对上图的情况,先对速度环PID进行调解。然后再调外环的P
什么是PID控制
Proportional Integral Derivative,实际上就是对调节器控制进行比例、积分、微分控制。
增大比例系数P将加快系统的响应,它的作用于输出值较快,但不能很好稳定在一个理想的数值,不良的结果是虽较能有效的克服扰动的影响,但有余差出现,过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏。
积分能在比例的基础上消除余差,它能对稳定后有累积误差的系统进行误差修整,减小稳态误差。
微分具有超前作用,对于具有容量滞后的控制通道,引入微分参与控制,在微分项设置得当的情况下,对于提高系统的动态性能指标,有着显著效果,它可以使系统超调量减小,稳定性增加,动态误差减小。
调参技巧
rate环p减小,id直接置零
只留p调到不抖为止,再看效果加i,一般不用d (所以d一般都是0就好了)
rate环是可以调出几乎不抖很好看的跟踪曲线的
最终的效果大概如下:



参数如下


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









